
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Алгоритм расчета усилий в стержнях плоской фермы методом конечных элементов
Алгоритм составлен на основе применения теории матриц к расчету ферм [1]. Рассмотрим произвольную плоскую стержневую систему. В первую очередь, необходимо описать структуру решетки системы, пронумеровав все узлы фермы и ее стержни. Для описания структуры составляется структурная матрица -S, в которой в каждом ее столбце находятся только два числа: 1 и -1, причем 1 располагается в строке, номер которой совпадает с началом стержня, а -1 - в строке, номер которой совпадает с номером узла, к которому примыкает конец стержня. За начало стержня принимается тот его конец, который примыкает (присоединяется) к меньшему по номеру узлу. В каждой строке структурной матрицы (а строка соответствует узлу, совпадающему с ней по номеру) значащие числа характеризуют номера элементов, соединяемых в узле, причем 1 подчеркивает то, что к узлу подходит начало стержня, а -1 - что к узлу подходит конец стержня. Далее следует сформировать матрицы - столбцы координат узлов фермы:
где i - номер соответствующего узла, Xi и Yi - соответственно координаты X и Y узла в выбранной системе координат. Общая матрица - столбец координат узлов фермы: где m - число узлов фермы. Матрица проекций длин элементов фермы: где (Транспонирование - преобразование исходной матрицы, состоящее в замене строк столбцами при сохранении их нумерации). Элементами матрицы проекций являются матрицы - столбцы, два элемента каждого из которых i-го стержня дают проекции:
Длины стержней определяются выражением: где
Векторы направляющих косинусов стержней:
По длине элемента фермы нормальная сила постоянна:
Построим вектор внешних нагрузок
элементами которого являются матрицы – столбцы - где где
Из уравнения (2.59) матрица столбец
где Пример расчета плоской фермы матричным методом Для пояснения алгоритма расчета стержневых систем по методу МКЭ в матричной форме выполним расчет простейшей трехстержневой фермы, показанной на рис.3.52.
Рис.3.52. Схема плоской фермы
Построим структурную матрицу фермы (рис. 3.52) по ранее приведенной форме:
В построенной матрице: строки – узлы фермы; столбцы – стержни фермы. Запишем матрицы – столбцы координат узлов фермы:
В матрице Транспонированная матрица
Матрица проекций длин элементов фермы по формуле (3.51): Длины стержней вычисляются по выражению (3.53):
Векторы направляющих косинусов стержней по формуле (3.54): Вектор внешних нагрузок по выражению (3.56): Для получения из структурной матрицы
Для построения матрицы-вектора Для построения матрицы
где N1, N2 и N3
|
||||||
|
|
Последнее изменение этой страницы: 2021-04-04; просмотров: 100; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.133.111.85 (0.024 с.) |
 , (3.49)
, (3.49) (3.50)
(3.50)  (3.51)
(3.51) транспонированная матрица
транспонированная матрица  .
. (3.52)
(3.52) (3.53)
(3.53) - матрица проекций стержня.
- матрица проекций стержня. - транспонированная матрица из
- транспонированная матрица из  (3.54)
(3.54) . (3.55)
. (3.55) (3.56)
(3.56) , определяющие проекции внешних сил, действующих на узлы, например, для j-го узла имеем:
, определяющие проекции внешних сил, действующих на узлы, например, для j-го узла имеем: (3.57)
(3.57)  и
и  - проекции внешних сил, действующих на j-й узел, на соответствующие координатные оси. Выражение, устанавливающее связь между внутренними усилиями и внешними силами, при этом будет следующее:
- проекции внешних сил, действующих на j-й узел, на соответствующие координатные оси. Выражение, устанавливающее связь между внутренними усилиями и внешними силами, при этом будет следующее: , (3.58)
, (3.58) - матрица – столбец, элементами которой являются искомые усилия в стержнях фермы;
- матрица – столбец, элементами которой являются искомые усилия в стержнях фермы; - матрица, получаемая из структурной матрицы
- матрица, получаемая из структурной матрицы  путем замены элементов 1 на соответствующие векторы направляющих косинусов стержней, а элементов (-1) матрицы
путем замены элементов 1 на соответствующие векторы направляющих косинусов стержней, а элементов (-1) матрицы  следует исключить элементы матрицы, соответствующие опорным связям системы, и таким путем получить вектор
следует исключить элементы матрицы, соответствующие опорным связям системы, и таким путем получить вектор  . Tаким же образом из матрицы
. Tаким же образом из матрицы  . Тогда вектор усилий
. Тогда вектор усилий  (3.59)
(3.59) (3.60)
(3.60) - обратная матрица относительно
- обратная матрица относительно 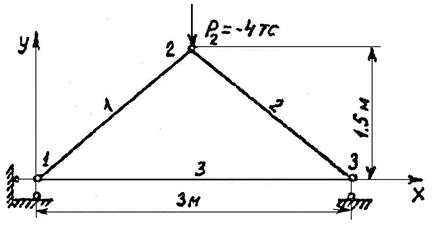
 цифра 3 обозначает координату узла 3 по оси Х (Х=3), вторая цифра 0 дает значение узла 3 по направлению оси Y (Y=0).
цифра 3 обозначает координату узла 3 по оси Х (Х=3), вторая цифра 0 дает значение узла 3 по направлению оси Y (Y=0). путем замены строк столбцами при сохранении их нумерации будет иметь вид:
путем замены строк столбцами при сохранении их нумерации будет иметь вид:

 3-й узел
3-й узел  1-й узел
1-й узел .
. ;
; ;
; .
. ;
; ;
; .
. .
.
 3-й стержень с заменой 1 на
3-й стержень с заменой 1 на 
 2-й стержень с заменой 1 на
2-й стержень с заменой 1 на 
 1-й стержень с заменой 1 на
1-й стержень с заменой 1 на 
 из вектора внешних нагрузок
из вектора внешних нагрузок 
 =
=  .
. Решение уравнений (3.59) и (3.60) в матричной форме дает следующий результат:
Решение уравнений (3.59) и (3.60) в матричной форме дает следующий результат: ,
, усилия в стержнях 1, 2 и 3 [Tc].
усилия в стержнях 1, 2 и 3 [Tc].


