Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Последовательное соединение.Стр 1 из 13Следующая ⇒
Последовательное соединение. I= const, U=U1+U2
Rобщ.=R1+R2 Параллельное соединение. 1/R общ.=1/R1+1/R2, U=const, I=I1+I2 g общ.=g1+g2, I=U/R
Вольтамперная характеристика линейного сопротивления. Сопротивление линейное, если вольтамперная характеристика имеет вид: Цепи, содержащие линейные сопротивления, называются линейными. Для расчета линейных цепей используют законы Ома и Кирхгофа.
Сопротивление нелинейное:
Цепи, содержащие нелинейные сопротивления, называются нелинейными цепями. Для расчета нелинейной цепи используют графоаналитический метод.
Ток называется постоянным, если он не меняется по величине и направлению. Ток называется переменным, если он меняется по величине и направлению.
Простейшая электрическая цепь. Режим работы цепей и режим работы источника.
     1- ЭДС (источник, генератор) 1- ЭДС (источник, генератор) 
2- проводник (провода)
Если по всем участкам цепи проходит один и тот же ток, то цепь называется неразветвленной. Если по различным участкам проходят различные токи, то цепь - разветвленная. Для расчета неразветвленной цепи применяют закон Ома, а для разветвленной цепи - закон Ома и законы Кирхгофа: 1 закон Кирхгофа: Алгебраическая сумма токов в узле равна 0. Пример: а

в
Для узла а: I1-I2-I3=0 2 закон Кирхгофа: å I i*Ri= å Eк I1*R1+I3*R3=E1 I1*R1+I2*R2=E1+E2 1.режим работы электрических цепей номинальный режим- это нормально допустимый режим. Uн, Iн, Pн - номинальная мощность P=I*U или I2*R ~Uн= 127, 220,380,600 В - номинальный ряд -Uн= 110,220,440 В 2.Согласованный режим- это такой режим, когда во внешнюю цепь передается номинальная мощность. Pвнешн.=max R генерат.=R нагр. 3. Режим холостого хода: цепь разомкнута I=0 или Iхх<< Iн R нагр.®¥ 4. Режим короткого замыкания: R нагр.»0 I к.з.>>Iн
1Режим генератора Е I 2 Режим потребителя Е¯ I
Методы расчета цепей постоянного тока.
Расчет нелинейных цепей. 1. Параллельное соединение нелинейного сопротивления и линейного сопротивления. R
U
2.Последовательное соединение нелинейного сопротивления (нс1) и нелинейного сопротивления (нс2)
Определить: I0, U01, U02 Схема последовательного соединения нелинейных сопротивлений.
Решение: (графоаналитический метод)
I- один U=U1+U2
Вольтамперная характеристика последовательного соединения нелинейных сопротивлений.
3.Смешанное соединение нелинейных сопротивлений: а)- схема смешанного соединения нелинейных сопротивлений.
б) - вольтамперные характеристики смешанного соединения нелинейных сопротивлений.
Расчет магнитных цепей.
Задачей расчета в большинстве случаев является определение н. с. Iw, необходимой для того, чтобы возбудить в магнитопроводе определенный магнитный поток или определенную магнитную индукцию в некотором участке магнитной цепи (чаще всего в воздушном промежутке). Расчет ведется на основании полного тока, согласно которому сумма магнитных напряжений на отдельных участках цепи равна н.с.:
Магнитная цепь делится по возможности на небольшое число п участков, в пределах каждого из которых можно считать напряженность Н и индукцию В постоянными. Затем, если задан магнитный поток Ф для одного из участков
, имеющего сечение S 1, определяется магнитная индукция:
Если в магнитной цепи имеется малый воздушный промежуток (или неферромагнитный участок), то сечение пути потока в воздухе можно принять равным сечению прилегающего ферромагнитного участка. Следовательно, индукция в воздушном промежутке ВВ равна индукции на этом соседнем участке (B В = В2). На основании |этой' индукции определяем напряженность поля; обычно в воздухе она относительно велика:
Рисунок: Ф= B*S, где Ф - магнитный поток [Ф] = [Вб] B - магнитная индукция [B ] = [Тл]
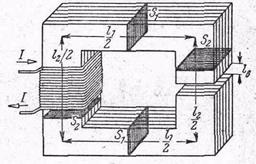
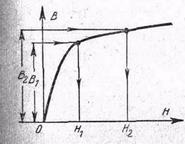
B= m*m0*H, где Н- напряженность магнитного поля [Н]=[А/м], m- относительная магнитная проницаемость, m >> 1 m0 - магнитная постоянная, m0= 4*p*10-7 Гн/м Fм= I*W - магнитодвижущая сила, где W - количество витков. Дано: Ф, известен материал сердечника, l1, l2, l0, S1, S2 Определить: I, W или I Решение: поскольку известен материал сердечника, пользуемся графиком намагничивания из справочника. 2*H1*l1+2*H2*l2+H0*l0 =I*W Ф®B1=Ф/S1 B0- инд. в воздушном зазоре B0=B2 B2=Ф/S2 B0=m*m0*H0 ; H0=B0/m*m0 H0=B0/4*p*10-7 Надо отметить, что поскольку m0 мало, то H0 будет очень большим, т.е. основная доля магнитодвижущей силы будет приходить на воздушный зазор. I W или I Так как, основная доля магнитодвижущей силы приходится на воздушный зазор, то H0*l0» I*W®H0®B0 B0=B2®Ф0=B2*S2 Ф/=0.95*Ф0 и решая прямую задачу определяем (I W)/
Пример: Дано: I*W =900 A c= 50 мм
в=200 мм l0=1 мм Определить: В0 (в воздушном зазоре) Решение: I*W»H0*l0
Опред. B0/=B2=m0 H0=8*105
B0=B2= Решение: H0a=7.5*105 А/м B04=B24 I*W/=2*H1a+2*H2*B2+H0*l0=2*630 (0.15+0.2)+5*105*10-3=1241А
Рисунок:
Переменный однофазный ток.
i- мгновенное значение Im - амплитудное значение (wt+j) - фаза j- начальная фаза w- угловая частота, w=2pf, f=1/T= [Гц]=[1/с] T- период За величину действительного значения переменного тока принимают такое значение постоянного тока, которое, проходя по проводнику, выделяет в определенное время такое количество теплоты, что и переменный ток. Iдействительное значение=I-- Q-= I2RT Q~= 0òTi2Rdt i-=Imsin wt Q~=ò0TImR2sin wtdt=Im2Rò0T1-cos 2wt/2 dt=Im2*R/2[T-ò0Tcos2wtdt=Im2/2*R*T
I=Im/Ö2 U=Um/Ö2 Для энергетической оценки переменного тока или напряжения вводят понятие средней величины. Iср.=òidt Iср.=2/p*Im Для того, чтобы складывать, вычитать переменные величины их изображают в виде векторов. Докажем, что вращающийся вектор будет изображать переменную величину.
Т.о. мы показали, что вращающийся вектор описывает синусоиды или переменную величину помимо изображенной в виде вектора. Резонанс напряжений.
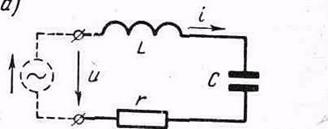
При последовательном соединении r, L, С возможен резонанс напряжений, т.е. оставляя неизменным общие напряжения мы можем неограниченно увеличивать напряжение на индуктивном и емкостном сопротивлениях. В неразветвленной цепи, содержащей элементы r, L, С (Рисунок а), резонанс наступает, когда индуктивное сопротивление xL равно емкостному сопротивлению xC. Действительно, при этом условии полное сопротивление цепи
Если известны значения индуктивности L. и емкости С, включенных в цепь последовательно, то можно определить частоту fрез, при которой наступит резонанс напряжений. Так как при резонансе
Сравнивая выражения и, видим, что fрез =fо. Если на зажимах рассматриваемой цепи поддерживать постоянное напряжение U и постепенно менять частоту f, то величина тока I будет непрерывно меняться. При резонансе сопротивление цепи zрез = r достигнет минимума,
а) цепь при резонансе напряжений. а ток в цепи будет наибольшим (рисунок а). Напряжение Ua на резонансе равно напряжению на зажимах цепи:
Напряжения на индуктивности U Lрез и емкости U Срез равны по величине и противоположны по фазе (рисунок б). Если сопротивления xLрез = xCрез >>r, то напряжения ul рез =UСрез будут значительно превышать общее напряжение U, приложенное к цепи; в связи с этим рассматриваемое явление и получило название резонанса напряжений. Повышенные напряжения (перенапряжения) на отдельных участках цепи, если они заранее не учтены, представляют опасность для целости изоляции электрической установки. В ряде областей электротехники резонанс напряжений находит полезное применение. Колебательные контуры, например, предъявляют неотъемлемую часть всякого радиотехнического устройства.
Допустим Xl=Xc , тогда Ul=Uc U=UR, если увеличивать сопротивления Xl и X c в n раз, т.е. n*Xl=n*Xc
Резонанс токов. В электрической цепи с параллельно соединенными катушкой и конденсатором может иметь место резонанс токов.
Цепь при резонансе токов. При резонансе ток I = I 1 + I 2 разветвленной части цепи совпадает по фазе с приложенным к цепи напряжением U. Цепь в целом ведет себя по отношению к питающему источнику как активная нагрузка, хотя в отдельных ее ветвях протекают токи, имеющие реактивные составляющие. Условием получения резонанса токов является равенство реактивных проводимостей bL, и bC обеих ветвей. При этом эквивалентная реактивная проводимость bэк= bL-bC = 0. Тогда реактивная составляющая общего тока
и ток в неразветвленной части цепи I=Iа=U gэк совпадает по фазе с напряжением U. Если активные составляющие токов в ветвях малы, то ток в неразветвленной части цепи будет значительно меньше каждого из токов, протекающих в ветвях. При наличии нескольких параллельных ветвей, содержащих индуктивные и емкостные сопротивления, условием резонанса токов является равенство
При постоянной частоте f резонанс в цепи может быть достигнут соответствующим подбором индуктивности L.или емкости С. Когда параметры L и С остаются неизменными, цепь может быть настроена в резонанс изменением частоты f питающего источника. Выражение для частоты fрез при резонансе токов может быть получено, если в равенстве bL=bC проводимости bL и bC выразить через сопротивления индуктивной ветви (r1 и xL=2pfрез L)и емкостной ветви (r2 и xC=
В радиотехнических устройствах, где используется явление резонанса токов, величины r2 и r1 незначительны по сравнению с отношением L/C. Тогда
т. е. условие резонанса токов совпадает с условием резонанса напряжений. Резонанс токов находит применение не только в радиотехнических устройствах: он широко используется в промышленных электроэнергетических установках для улучшения cosj. ВРАЩАЮЩЕЕСЯ МАГНИТНОЕ ПОЛЕ. Ценным свойством всех многофазных систем переменного тока является простота получения вращающегося магнитного поля. Это постоянное по величине магнитное поле, вращающееся внутри электрической машины вокруг ее оси. На использовании вращающегося магнитного поля основано устройство самых распространенных электродвигателей — асинхронных двигателей трехфазного тока, а также имеющих большое практическое значение, синхронных двигателей.
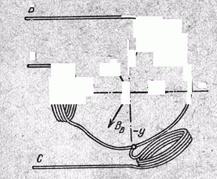
Воздействие на положение магнитной стрелки изменением Направления постоянных токов в двух катушках. Кроме того, посредством вращающегося магнитного поля приводятся в действие многие измерительные приборы и аппараты регулирования и управления. Путем последовательного изменения направления постоянного тока в двух катушках, оси которых образуют угол 90°, можно заставить магнитную стрелку поворачиваться в пределах 360°. Но переключаемый постоянный ток легко заменить переменным током, который сам будет изменять направление. При этом необходимо, чтобы изменения направления тока в двух катушках происходили не одновременно. Этому требованию удовлетворят два переменных тока, сдвинутых по фазе друг по отношению к другу на четверть периода. На рисунке показана система из двух одинаковых катушек, оси которых образуют угол 90°. Для придания большей равномерности магнитному полю каждая из катушек разделена на две части. Так как токи относительно сдвинуты по фазе на четверть периода, то магнитные индукции в полях, ими возбуждаемых, должны быть также сдвинуты по фазе по отношению друг к другу. Этому условию сдвига по фазе удовлетворяют синусоида и косинусоида. В соответствии с чем индукция поля первой катушки BA == Bm sin wt, а индукция поля второй катушки BB = Bm cos wt.
Схема получения двухфазного вращающегося магнитного поля.
Накладываясь в середине устройства, два переменных магнитных поля образуют результирующее магнитное поле, индукция в котором будет Bрез =
Следовательно, результирующее магнитное поле устройства постоянно по величине, хотя оно и складывается из двух переменных магнитных полей. Определим теперь положение результирующего поля в пространстве. По отношению к вертикальной оси это поле образует угол a, определяемый условием
на основании чего можно считать, что a = wt, т. е. угол, образуемый осью результирующего поля, по отношению к оси катушки В равномерно изменяется и за время одного периода переменного тока
т. е. поле делает полный оборот. В секунду поле делает f оборотов, а число оборотов поля в минуту n = f '60. Таким образом, при стандартной промышленной частоте
Описанная система именуется двухфазным вращающимся магнитным полем. Для возбуждения его нужна двухфазная система переменных токов. Такая система требует для передачи энергии не менее трех проводов. Так как равные по величине векторы двух фазных токов системы IА и IВ образуют угол 90°, то, следовательно, вектор тока в общем проводе I0 определяется как гипотенуза равнобедренного прямоугольного треугольника c катетами IА = IВ = Iф. На основании чего этот ток
Значительно выгоднее получение вращающегося магнитного поля посредством трехфазной системы токов, как это было предложено М.О.Доливо-Добровольским. Для получения трехфазного вращающегося поля нужны три одинаковые катушки, оси которых образуют углы по 120°. Мгновенные значения индукции в поле катушек, питаемых трехфазной системой токов, будут:
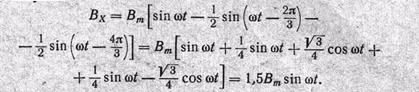
В общей части поля эти магнитные индукции складываются векторно, образуя магнитную индукцию результирующего поля. Это поле удобно определить через составляющие по двум взаимно перпендикулярным осям. С этой целью построим в пространстве такие оси Х и Y, проходящие через поле катушек, причем оси Х дадим направление оси катушки А. Определим теперь составляющую результирующего поля по оси X. Она будет равна алгебраической сумме проекций на эту ось мгновенных значений трех индукции:
Подставив теперь выражения индукций как синусоидальных величин, получим:
Составляющая результирующего магнитного поля по оси Y будет
или после подстановки значений индукций как синусоидальных величин
Результирующая магнитная индукция
т. е. результирующее поле постоянно по величине, а угол a, образуемый им с осью Y, определяется из условия
Магнитное поле вращается в плоскости осей катушек с угловой скоростью w0. Оно последовательно совпадает по направлению с осью той из катушек, ток в которой достигает максимального значения, т. е. оно вращается в направлении последовательности фаз трехфазной системы токов, питающих катушки. Сопоставим теперь условия двухфазного и трехфазного вращающихся полей. При двухфазной системе необходимы два провода, рассчитанных на силу тока I, и третий провод, рассчитанный на силу тока I0= Ö2 I. Магнитная индукция во вращающемся двухфазном поле Вт. При трехфазной системе необходимы три одинаковых провода, рассчитанных каждый на силу тока I, а индукция во вращающемся поле здесь 1,5 Вт. Следовательно, для двухфазной системы нужно большее сечение проводов, а вращающееся поле создается в 1,5 раза слабее, чем в трехфазной системе. По этим причинам двухфазный ток, изобретенный раньше трехфазного (инженером Тесла), в настоящее время применяется только в некоторых специальных устройствах. Подвижное устройство, помещенное во вращающееся магнитное поле,
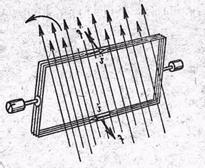
может вращаться в нем асинхронно или синхронно. Поместим во вращающееся магнитное поле металлическую рамку на осях так, чтобы ось вращения рамки совместилась с осью вращения поля. Поле будет пересекать рамку и индуктировать в ней э. д. с. тем большую, чем быстрее поле пересекает рамку, так как согласно закону электромагнитной индукции:
Направление э. д. с., индуктируемых в двух сторонах рамки, можно определить по правилу правой руки. Только необходимо учесть, что движение магнитного, поля по отношению к проводнику эквивалентно движению проводника в противоположную сторону. Следовательно, определяя направление э.д.с., нужно поставить ладонь навстречу магнитным линиям, а отставленный большой палец направить против движения магнитного поля, тогда вытянутые четыре пальца укажут направление индуктированной э.д.с. Электродвижущие силы, индуктируемые в двух сторонах рамки, направлены в витке, который образует рамка, согласно, т. е. они складываются. Так как рамка представляет собой замкнутый виток, то индуктированные в ней э.д.с. вызывают некоторый индуктированный ток i. Воздействие вращающегося магнитного поля на этот ток создает две силы f = Bil, приложенные к двум сторонам рамки. Направление этих сил можно определить по правилу левой руки. Они образуют пару сил и создают вращающий момент, воздействующий на рамку. Под действием этого момента рамка должна вращаться в направлении вращения поля. Однако чем быстрее будет вращаться рамка, тем относительно медленнее будут пересекать ее стороны линии магнитного вращающегося поля, т. е. будет уменьшаться скорость v движения поля по отношению к рамке. Вследствие этого будет уменьшаться сила тока i, индуктируемого в рамке. В свою очередь это вызывает ослабление вращающего момента, воздействующего на рамку. Если рамка догонит вращающееся поле, то э.д.с. и ток в ней исчезнут, так как прекратится пересечение сторон рамки вращающимся магнитным полем, вследствие чего станет равным нулю и вращающий момент, воздействующий на рамку. По этим причинам рамка вращается с асинхронной скоростью [от греческого слова «асинхронос» неодновременный] медленнее поля, т. е. рамка делает оборот неодновременно с оборотом поля. Скорость вращения рамки п оборотов в минуту устанавливается автоматически такой, чтобы вращающий момент, создаваемый индуктированным током, равнялся тормозящему моменту, обусловленному трением в осях, трением о воздух и т. п. Чем больше механические силы, тормозящие рамку, тем медленнее она будет вращаться и тем больше будет сила тока, индуктируемого в ней. При асинхронном вращении поле делает п1 оборотов в минуту, а подвижная часть, называемая обычно ротором, только п оборотов в минуту. Относительное отставание ротора от поля характеризуется скольжением:
Металлическая рамка во вращающемся магнитном поле.
Постоянный магнит во вращающемся магнитном поле. Если во вращающееся магнитное поле поместить очень легкую магнитную стрелку, то она будет вращаться вместе с полем с синхронной скоростью (греческое слово «синхронос» - совпадающий по времени), т. е. поле и стрелка будут совершать один оборот за одно и то же время. Магнитные силы, стремясь установить стрелку по направлению поля, будут поддерживать это вращение. Но если подвижный магнит относительно тяжел, то под действием вращающегося поля он не стронется с места. Воздействуя на такой неподвижный магнит, вращающееся поле в течение половины оборота будет создавать вращающий момент, а в течение второй половины оборота - тормозящий момент, так как магнитные силы будут тянуть магнит то в сторону вращения поля, то в противоположную сторону. Если же с помощью какого-либо приспособления разогнать магнит до скорости поля, т. е. до синхронной скорости, то, войдя, в синхронизм, магнит будет вращаться со скоростью поля. Он сохранит эту синхронную скорость и когда ему придется преодолевать какую-либо тормозящую силу, но в этом случае магнит будет отставать от вращающегося поля на некоторый постоянный угол. Этот угол будет тем больше, чем больше будет тормозящая сила. Если же эта сила станет слишком большой, то магнит остановится —выпадет из синхронизма. Вращаться медленнее поля он не может. Синхронное вращение используется в синхронных двигателях, применяемых главным образом в тех случаях, когда нужен двигатель значительной мощности, вращающийся с постоянной скоростью. Трехфазный переменный ток.
Схема устройства генератора трехфазного тока.
eA=EA sinwt eB=EB sin(wt-120°) eC=EB sin(wt-240°)= EC sin(wt+120°) f=p*n/60, где p-число пар полюсов для 3х обмоток. n= 3000 об/мин. [n]=[об./мин.] Трехфазной системой переменного тока называется система трех однофазных переменных напряжений, изменяющихся с одинаковой частотой и отличающихся нач. фазами. Если разность фаз равна 120° или 2p/3, то такая система называется симметричной. В комплексной форме: EA=EB=EC=UФ Ua=UФ; Ub=UФ e-j120°= UФ(-1/2-jÖ3/2) ; UC=UФej 120°=UФ(-1/2+jÖ3/2);
Векторная диаграмма э.д.с. трехфазной системы.
EA+EB+EC=0
Соединение обмоток генератора звездой (соединение U 0). Трансформатора. Трансформатор - это статический электромагнитный аппарат, предназначенный для преобразования напряжения, тока без изменения частоты.
Трансформатор состоит из сердечника. Сердечник набирается из листовой электротехнической стали. Сердечник делается из листов, чтобы уменьшить потери на вихревые токи. Эл чтобы уменьшить потери на гистерезис. На стержни наматываются обмотки. Обмотка низшего напряжения, которая имеет меньшее количество витков и делается из провода большего сечения. Обмотка высшего напряжения - большее количество витков. Материал - медный провод. Njr U2>U1 - повышающий трансформатор; U2<U1 -понижающий трансформатор; U2®I®Ф®Е2»U2
Реверсирование двигателя. Изменение направления вращения (реверсирование) двигателя достигается либо изменением направления тока в цепи якоря, либо изменением направления тока в цепи возбуждения. На рис., а показана принципиальная схема включения обмоток двигателя до реверсирования, а на рис. б и в - схемы включения для измененного направления вращения двигателя.
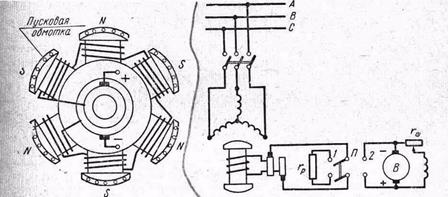
Схемы реверсирования двигателя постоянного тока. Пуск синхронного двигателя. В течение длительного времени синхронные двигатели применялись сравнительно мало из-за трудности пуска. Это связано с тем, что синхронный двигатель не имеет начального пускового момента. Как указывалось, электромагнитный момент, действующий на неподвижный ротор, оказывается направленным в течение одного полупериода в одну сторону, а в течение следующего полупериода— в обратную сторону, и ротор не в состоянии тронуться с места.
Ротор синхронного двигателя Схема пуска синхронного двигателя. с дополнительной пусковой обмоткой. Использование синхронных двигателей в промышленности стало практически возможным только после создания простой схемы асинхронного пуска этих двигателей. Роторы современных синхронных двигателей, помимо обмотки возбуждения, имеют пусковую короткозамкнутую обмотку типа «беличьей клетки».Стержни пусковой обмотки расположены в пазах полюсных наконечников и соединены на торцах пластинками. Пуск двигателя (рисунок) протекает в следующем порядке. Обмотка возбуждения отключается от возбудителя и при помощи переключающего устройства П замыкается на сопротивления реостата rр (переключатель находится в положении 1). После этого обмотка статора присоединяется к сети трехфазного тока. Возникшее вращающееся магнитное поле будет индуктировать токи в обмотках ротора. Взаимодействие этих токов с вращающимся полем вызывает появление момента, который и производит разгон ротора синхронной машины так, как это имеет место в асинхронном двигателе с короткозамкнутым ротором. Когда ротор достигает установившейся скорости n, близкой к синхронной (n>=0,95 n0 ), в обмотку возбуждения подают постоянный ток от возбудителя (переключатель Пнаходится в положении 2), и двигатель входит в синхронизм.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-03-09; просмотров: 58; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.17.5.68 (0.208 с.) |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

 н.с.
н.с.



 (примеры нелинейных сопротивлений: триоды, диоды)
(примеры нелинейных сопротивлений: триоды, диоды) 3- нагрузка (приемник)
3- нагрузка (приемник)






 Определить: I, I1, I2 I I1 I=I1+I2
Определить: I, I1, I2 I I1 I=I1+I2
 Решение:
Решение:
 (графоаналитический метод) I2
(графоаналитический метод) I2 Дано: U, нс1, нс2
Дано: U, нс1, нс2 


 , а на основании значения В1 с помощью кривой намагничивания материала этого частка сердечника определяется напряженность Н1, соответствующая индукции B1. В таком же порядке для второго участка нужно найти сначала B2=Ф/S2, а затем по кривой намагничивания Н2. Этим путем последовательно определяется значение напряженности для всех участков цепи.
, а на основании значения В1 с помощью кривой намагничивания материала этого частка сердечника определяется напряженность Н1, соответствующая индукции B1. В таком же порядке для второго участка нужно найти сначала B2=Ф/S2, а затем по кривой намагничивания Н2. Этим путем последовательно определяется значение напряженности для всех участков цепи. .
.  Рисунок:
Рисунок:


 а=150 мм
а=150 мм H0=I*W/l0=900/1*10-3=8*105
H0=I*W/l0=900/1*10-3=8*105
 В
В IW
IW i=Im sin (wt+j)
i=Im sin (wt+j)







 ):
):
 »
» 


 , так как направления полей катушек взаимно перпендикулярны. Подставив в выражение Врез значения ВА и ВВ как функции времени, получим:
, так как направления полей катушек взаимно перпендикулярны. Подставив в выражение Врез значения ВА и ВВ как функции времени, получим: