
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
От каких факторов зависит результат тяги мышцы в кинематической цепи.Стр 1 из 23Следующая ⇒
Биомеханика Фещенко МВ Контрольная работа №1 Задание №6. От каких факторов зависит результат тяги мышцы в кинематической цепи. Результат приложения тяги мышцы в кинематической цепи зависит от: а) закрепления звеньев; б) соотношения сил, вызывающих движение, и сил сопротивления, в) начальных условий вращения. Чтобы определить результат тяги мышцы, недостаточно установить величину и направление этой тяги. При различных условиях закрепления звеньев одна и та же тяга приводит к неодинаковому результату — разным движениям звеньев в суставе. В кинематической паре может быть закреплено одно звено, или оба свободны, или оба закреплены. Соответственно возникнут ускорения того или иного звена, либо обоих вместе (встречные движения), либо соединение будет фиксировано. Для двусуставной мышцы, не говоря уже о многосуставных, число возможных вариантов результата во много раз больше. Когда одно или оба звена могут двигаться свободно, величина ускорения зависит от вращающего момента, момента сил внешнего сопротивления и распределения масс звена. Иначе говоря, движение зависит от тог о, каково соотношение движущей силы и соответствующего сопротивления. Наконец, особо важны начальные условия вращения — положение звеньев пары и скорость их движения (направление и величина) в момент приложения силы. От них зависит эффект тяги мышцы: ускорение движения, замедление его или изменение направления, изменение величины и направления скорости одновременно. В кинематических цепях действуют те же факторы, определяющие результат тяги каждой мышцы. Но так как в кинематической цепи все звенья так или иначе взаимосвязаны, то в каждом конкретном случае лишь совокупность всех факторов определяет, результат работы мышц в целом. Условия сохранения положения звеньев и их движения как рычагов. «Золотое Правило» механики. Золотое правило механики в движениях человека. Сила тяги мышцы, приложенная на коротком плече рычага, вызывает во столько раз большее смещение другого плеча, во сколько раз первое плечо короче второго (выигрыш в пути). Так как разные пути проходятся за одно и то же время, имеет место также и выигрыш в скорости. При этом, сила передаваемая на длинное плечо рычага, ровно во столько же раз меньше, чем приложенная. Следовательно, выигрыш в скорости достигается за счет проигрыша в силе.
Почти все мышцы в теле человека прикрепляются вблизи суставов (короткое плечо рычага), это приводит к выигрышу в пути (следовательно, и в скорости) при проигрыше в силе. При большей части положений костного рычага мышечные тяги направлены под острым или тупым углом к звену (вдоль звена), что влечет невосполнимые потери в силе мышц (уменьшается вращающая тяга). Нормальная же (скрытая) тяга в этом случае способствует укреплению сустава, через который мышца переходит. При больших нагрузках напрягаются все мышцы, окружающие суставы, в том числе и антагонисты. При этом резко возрастают потери в суммарной тяге мышц, в то же время достигается и положительный эффект — укрепление нагруженного сустава. В связи с особенностями приложения мышечных тяг к костным рычагам необходимы весьма значительные напряжения мышц для выполнения не только силовых, но и скоростных движений. Входящие в биокинематические цепи, звенья тела образуют системы составных рычагов, в которых «золотое правило» механики проявляется намного сложнее, чем в простых одиночных рычагах. Геометрия движений: количество степеней свободы одного звена относительно В суставном движении различают ось, плоскость и размах. Все пары звеньев связаны в суставах неразрывно, как в шарнирах, поэтому они могут двигаться в основном только вокруг осей (не считая незначительного скольжения). Однако не существует суставов совершенно правильной геометрической формы. А если бы даже такие и были, то при сдавливании гиалиновых суставных хрящей форма суставных поверхностей нарушалась бы. Следовательно, геометрические оси вращения не постоянны и правильнее говорить о мгновенных осях вращения. В связи с этим количество осей в суставе означает в биомеханическом смысле только количество степеней свободы движения, а не постоянных геометрических осей вращения. Продольные оси звеньев чаще всего не строго перпендикулярны геометрическим осям вращения. Поэтому различные точки звеньев движутся в плоскостях, параллельных друг другу, а сама продольная ось звена описывает поверхности, близкие к коническим. Таким образом, плоскость движения в суставе характеризует, в какой плоскости движутся точки звена. Она перпендикулярна геометрической оси вращения и не обязательно совпадает с плоскостью движения продольной оси самого звена.
Размахом движений измеряется подвижность в каждом отдельном суставе. Наибольший размах бывает в пассивных движениях, с увеличением внешней нагрузки (вес отягощения, силы инерции) растягиваются мягкие ткани-ограничители. Размах же в активном движении меньше, чем в пассивном, так как там мышцы имеют предел силы, в то время как величина внешних сил не ограничена. К тому же сила собственных мышц пары звеньев приложена невыгодно при крайних положениях звеньев в суставе. Подвижностью соседних звеньев в соединениях каждой пары обусловлена гибкость всей кинематической цепи в целом. Гибкость цепи (например, позвоночника) измеряется общим размахом движения концевого звена относительно другого конца цепи. Скелет, составленный из подвижно соединенных костей, представляет собой твердую основу биокинематических цепей. Звенья цепей с приложенными к ним силами (мышечной тяги и др.) в биомеханике рассматриваются как система составных рычагов. Величина силы тяги мышцы связана с быстротой ее продольной деформации. С увеличением скорости сокращения мышцы при преодолевающей работе ее сила тяги уменьшается. При уступающей же работе увеличение скорости растягивания мышцы увеличивает ее силу тяги. Это очень важно для оценки силы тяги мышцы при быстрых движениях. Мышцы, осуществляющие движения подвижных звеньев, обеспечивающие активные движения, создают рабочие тяги. Эти мышцы изменяют свою длину, сокращаются при преодолевающей работе и растягиваются при уступающей. Для выполнения движений как при опоре, так и без опоры (полетные фазы прыжка, бега и т. п.) необходимо создавать опору для работающих мышц, звенья тела, соприкасающиеся с опорой — опорные звенья, сохраняют свое положение и связь с ней (например в висе) благодаря опорным тягам мышц. Это статическая работа, фиксирующая суставы. Кроме того, фиксируются те или иные звенья тела, что создает опору для мышц, выполняющих динамическую работу. Получается в целом своего рода фундамент для подвижных звеньев, движущихся относительно друг друга и относительно опорных звеньев. Таким образом, все мышцы, участвующие в двигательных действиях, работают либо статически, либо динамически. Эти виды работы зависят друг от друга. В движениях, требующих значительных рабочих тяг, обычно бывают значительными и опорные тяги. Дифференциальная биомеханика изучает индивидуальные и групповые особенности двигательных возможностей и двигательной деятельности в зависимости от возраста, пола, состояния здоровья, уровня физической подготовленности, спортивной квалификации и т.п. Частная биомеханика рассматривает конкретные вопросы технической и тактической подготовки в отдельных видах спорта и массовой физкультуры. Основной вопрос частной биомеханики – как научить человека правильно выполнять движения.
Спортивная биомеханика изучает двигательные действия человека при выполнении им спортивных упражнений. Это необходимо для обеспечения роста спортивных результатов вплоть до рекордных для конкретного спортсмена или определенного вида спорта, выявления помогающих или препятствующих факторов при совершенствовании движений. Основные задачи спортивной биомеханики состоят в следующем: 1.Совершенствование спортивной техники, моделирование и конструирование ее наиболее рациональных вариантов. Тема 2: БИОДИНАМИКА МЫШЦ Контрольная работа №2 Задание № 7 Виды и режим работы мышц. Различают преодолевающую, уступающую, и удерживающуюработу мышц. Работа мышцы, при которой происходит преодоление силы тяжести звена тела или груза и движение костей в суставах называется преодолевающей илидинамической. Мышца сокращается при этом визотоническомрежиме. Под работой уступающей подразумевается такая работа мышцы, при которой она, оставаясь напряженной, постепенно расслабляется, уступая действию силы тяжести или действию того или иного сопротивления. Работа мышцы, при которой мышечные волокна развивают напряжение без укорочения мышцы, называется удерживающей илистатической. Режим работы мышцы называетсяизометрическим. Работа опорно-двигательного аппарата при движении и сохранении положения тела всегда сопровождается всеми видами работы мышц. Например, рассмотрим работу четырёхглавой мышцы бедра при выполнении приседания. При переходе в положение сед мышца выполняет уступающую работу, в положение сед – удерживающую, при подъёме из положения сед – преодолевающую. Противоположный характер работы мышц антагонистов обеспечивает плавность движений человека. Так, например, если происходит разгибание голени в результате преодолевающей работы разгибателей передней группы мышц бедра, то сгибатели голени одновременно растягиваются, выполняя уступающую работу. Если бы не было этой регулирующей работы, то наши движения были бы толчкообразного, порывистого характера. С другой стороны, наличие такого механизма препятствует выполнению резких движений, необходимых в отдельных видах спорта (удары в боксе, удары по мячу в футболе, волейболе). Систематическая работа мышц, требующая большого напряжения (силовая нагрузка) приводит к рабочей гипертрофии мышцы. В основе гипертрофии лежит увеличение массы цитоплазмы мышечных волокон и числа содержащихся в них миофибрилл. Особенно увеличению количества миофибрилл способствует статическая работа. Динамическая мышечная работа, производимая без большого напряжения (нагрузка на выносливость) не вызывает гипертрофии мышцы.При работе мышц статического характера, связанной с длительными напряжениями, возможно изменение строения, заключающееся в некотором укорочении мышечных волокон и удлинении сухожильной части мышцы. При работе динамического характера “на выносливость”, наоборот, может происходить некоторое увеличение мышечной части за счёт укорочения сухожилий.Противоположным рабочей гипертрофии состоянием является атрофия мышцы от бездеятельности. При атрофии диаметр мышечных волокон и содержание в них сократительных белков уменьшается. После возобновления нормальной работы мышцы атрофия постепенно исчезает.Определение направления действия силы мышечной тяги.Как уже было сказано, у каждой мышцы выделяют сухожилие начала и сухожилие прикрепления. Соответственно наименованию сухожилий области их фиксации именуются как место начала и место прикрепления мышцы. Когда говорят о месте начала и месте прикрепления мышцы, то условно подразумевают неподвижный и подвижный пункт фиксации сухожилий. Такая условность связана с представлением о наиболее часто наблюдаемых движениях, вызываемых сокращением данной мышцы. В “чистом” виде неподвижное место начала и подвижное место прикрепления имеет место только у мимических мышц и мышц глазного яблока. У большинства мышц скелета неподвижность места начала и подвижность места прикрепления могут меняться в зависимости от того, какое звено тела в данный момент более подвижно. Так, например, мышцы таза при проксимальной опоре нижней конечности производят движения бедра, и при дистальной – движение таза. Поверхностные мышцы спины и груди при проксимальной опоре производят движение верхней конечности, при дистальной – движения туловища. Однако, во всех случаях сила, с которой данная мышца притягивает место начала или место прикрепления, всегда остаётся одинаковой согласно закону Ньютона.В наиболее простых случаях за направление тяги мышцы принято считать прямую, соединяющую центр места начала с центром места прикрепления. Однако, в действительности лишь в редких случаях направление движения полностью совпадает с направлением тяги мышцы (прямая мышца живота, трёхглавая мышца плеча, камбаловидная мышца). Функцию мышц, имеющих обширные места начала или прикрепления, рассматривают по действию отдельных пучков. В таких случаях определяют направление тяги отдельных пучков, функция которых может быть прямо противоположной. Так, например, передние пучки дельтовидной мышцы сгибают, пронируют плечо, задние - разгибают и супинируют его. Верхние пучки трапециевидной мышцы тянут пояс верхней конечности вверх, нижние – вниз.Направление действия силы мышечной тяги таких мышц целиком определяется или диагональю параллелограмма,построенного на направлениях тяги отдельных пучков, или как результат действияпары сил, имеющей разные точки прикрепления, или путёмсложенияивычитаниясил мышечных тяг отдельных пучков.Так, сокращение всех пучков дельтовидной мышцы имеет равнодействующую силу мышечной тяги, производящую отведение плеча (правило вычитания сил), равнодействующая сила мышечной тяги трапециевидной мышцы вращает лопатку нижним углом кнаружи и приводит её к позвоночному столбу (правило параллелограмма, пара сил, сложение сил).3.Дайте подробное объяснение тому, как осуществляется управление движениями в многоостных суставах. (Согласованная работа мышц синергистов и антагонистов). Как формируются силы, определяющие величину скорости звена и направление его движения.
При сокращении мышцы происходит укорочение ее и сближение двух точек, к которым она прикреплена. Из этих двух точек подвижный пункт прикрепления, punctum mobile, притягивается к неподвижному, punctum fixum, и в результате происходит движение данной части тела. Действуя сказанным образом, мышца производит тягу с известной силой и, передвигая груз (например, тяжесть кости), совершает определенную механическую работу. Сила мышцы зависит от количества входящих в ее состав мышечных волокон и определяется площадью так называемого физиологического поперечника, т. е. площадью разреза в том месте, через которое проходят все волокна мышцы. Величина сокращения зависит от длины мышцы. Кости, движущиеся в суставах под влиянием мышц, образуют в механическом смысле рычаги, т. е. как бы простейшие машины для передвижения тяжестей. Чем дальше от места опоры будут прикрепляться мышцы, тем выгоднее, ибо благодаря увеличению плеча рычага лучше может быть использована их сила. С этой точки зрения П. Ф. Лесгафт различает мышцы сильные, прикрепляющиеся вдали от точки опоры, и ловкие, прикрепляющиеся вблизи нее. Каждая мышца имеет начало, origo, и прикрепление, insertio. Поскольку опорой для всего тела служит позвоночный столб, расположенный по средней линии тела, постольку начало мышцы, совпадающее обычно с неподвижной точкой, расположено ближе к средней плоскости, а на конечностях — ближе к туловищу, проксимально; прикрепление мышцы, совпадающее с подвижной точкой, находится дальше от середины, а на конечностях — дальше от туловища, дистально. Punctum fixum и punctum mobile могут меняться своими местами в случае укрепления подвижной точки и освобождения фиксированной. Например, при стоянии подвижной точкой прямой мышцы живота будет ее верхний конец (сгибание верхней части туловища), а при висе тела с помощью рук на перекладине — нижний конец (сгибание нижней части туловища). Так как движение совершается в двух противоположных направлениях (сгибание — разгибание, приведение — отведение и др.), то для движения вокруг какой-либо одной оси необходимо не менее двух мышц, располагающихся на противоположных сторонах. Такие мышцы, действующие во взаимно противоположных направлениях, называются антагонистами. При каждом сгибании действует не только сгибатель, но обязательно и разгибатель, который постепенно уступает сгибателю и удерживает его от чрезмерного сокращения. Поэтому антагонизм мышц обеспечивает плавность и соразмерность движений. Каждое движение, таким образом, есть результат действия антагонистов. В отличие от антагонистов мышцы, равнодействующая1 которых проходит в одном направлении, называются агонистами, или синергистами. В зависимости от характера движения и функциональной комбинации мышц, участвующих в нем, одни и те же мускулы могут выступать то как синергисты, то как антагонисты. Кроме элементарной функции мышц, определяемой анатомическим отношением их к оси вращения данного сустава, необходимо учитывать изменения функционального состояния мышц, наблюдаемые в живом организме и связанные с сохранением положения тела и его отдельных частей и постоянно меняющейся статической и динамической нагрузки на аппарат движения. Поэтому одна и та же мышца в зависимости от положения тела или его части, при котором она действует, и фазы соответствующего двигательного акта часто меняет свою функцию. Например, трапециевидная мышца по-разному участвует своими верхней и нижней частями при подъеме руки выше горизонтального положения. Так, при отведении руки обе названные части трапециевидной мышцы одинаково активно участвуют в этом движении, затем (после подъема выше 120°) активность нижней части названного мускула прекращается, а верхней — продолжается до вертикального положения руки. При сгибании руки, т. е. при поднятии ее вперед, нижняя часть трапециевидной мышцы малоактивна, а после подъема выше 120°, наоборот, обнаруживает значительную активность. Рис.. Кинематические диаграммы Обозначив через На полюсное расстояние, можно по аналогии с определением масштаба графика скорости получить масштаб графика ускорения
График перемещений по известному графику скорости или график скорости при заданном графике ускорения можно построить с помощью графического интегрирования. При интегрировании построение производят в порядке, обратном тому, какой принят при дифференцировании. На отдельных участках графика v = v (t) принимается постоянная средняя скорость (штриховые линии). Величины отрезков, определяющих скорости, сносятся на ось ординат. Точ Графическое интегрирование: а – график скорости; б – график перемещений Аналитический метод. Этот метод позволяет определять скорости и ускорения с более высокой точностью. Обычно применяют метод последовательного дифференцирования функции перемещения точки, скорость и ускорение которой необходимо определить. Функцию перемещения s = s (t) или s = s (φ) можно получить из геометрических соображений, как, например, это сделано для кривошипно-ползунного механизма — формула (2.5), а ее скорость и ускорение — путем дифференцирования уравнений (2.3). Дифференцируя уравнения (2.3) по обобщенной координате φ1 (углу поворота ведущего звена), получают не истинную угловую скорость, а безразмерную величину
Определим значение Рис. Кинематический анализ механизма поперечно-строгального станка Скорость центра вращательной пары D4, являющейся внешней для группы 4 —5, равна скорости точки D3 звена 3. Из подобия плана относительных скоростей плану звена
Скорость точки Do на стойке равна нулю;
Через точки d4 и d0 плана скоростей проводим линию действия скорости
На основании аналогичных рассуждений строится план ускорений механизма. Векторные уравнения для определения ускорения точки В3 имеют вид
Ускорение точки В2 как совпадающей с точкой В1 пальца кривошипа
Откладываем в выбранном масштабе Величины нормального ускорения
Эти ускорения в виде соответствующих отрезков
Угловое ускорение третьего звена по формуле, аналогичной формуле (2.13), Из подобия плана относительных ускорений плану звена определим ускорение
и в масштабе Для определения ускорения
Кориолисовы ускорения На пересечении указанных линий определится положение точки d5, и, следовательно, полное ускорение Рис. 1
Рис.2 Следует обратить внимание на тот факт, что мышцы-антагонисты при выполнении движения работают в различных режимах. Например, при сгибании руки мышцы-сгибатели укорачиваются (преодолевающий режим), а мышцы-разгибатели (их антагонисты) — удлиняются (уступающий режим). Если измерить силу мышц после выполнения упражнений в эксцентрическом режиме, то окажется, что она уменьшается значительно больше, чем при выполнении упражнений в концентрическом режиме. О чем это говорит? Это говорит о том, что в эксцентрическом режиме повреждено больше мышечных волокон. При выполнении силовых упражнений в изометрическом режиме увеличивается степень перекрытия мышечных и сухожильных волокон, несколько утолщается сухожилие и увеличивается площадь прикрепления сухожилия к кости. Именно поэтому рекомендуется в конце тренировки выполнять упражнения в изометрическом режиме (около 15 минут). Считается, что это позволяет уменьшить количество травм опорно-двигательного аппарата человека. Если мышца сокращается в динамическом режиме (концентрическом или эксцентрическом режимах), в ней через некоторое время увеличивается длина мышечных волокон и уменьшается длина сухожилия. Компьютерное моделирование (U. Proske, D.L. Morgan, 2001) подтвердило целесообразность удлинения мышечной части и укорочения сухожильной. Авторами показано, что долговременная адаптация к выполнению эксцентрических упражнений проявляется в увеличении количества сакомеов в миофибрилах мышечных волокон и уменьшении сухожильной части. Это приводит к изменению оптимальной длины мышцы при развитии активного напряжения. При выполнении силовых упражнений в динамическом режиме (концентрическом или эксцентрическом) возрастает количество нервных волокон, иннервирующих скелетную мышцу (в 4-5 раз больше, чем в изометрическом режиме). В физиологии принята несколько иная классификация режимов работы мышц. В качестве классификационных признаков используется длина и тонус мышцы. Согласно этим признакам режимы работы мышц делятся на три вида: изотонический, изометрический, ауксотонический. Эту классификацию даю по учебнику А.С. Солодкова, Е.Б.Сологуб (2005) Изотонический режим (режим постоянного тонуса мышцы) наблюдается при отсутствии нагрузки на мышцу, когда мышца закреплена с одного конца и свободно сокращается. Напряжение в ней при этом не изменяется. Это происходит при раздражении изолированной мышцы лягушки, закрепленной одним концом на штативе. В таком режиме в организме человека работает только одна мышца — мышца языка. В настоящее время в литературе в качестве изотонического рассматривается такой режим работы мышцы с нагрузкой, при котором по мере изменения длины мышцы ее тонус не меняется. Изометрический режим (режим постоянной длины мышцы) характеризуется напряжением мышцы в условиях, когда она закреплена с обеих концов или когда она не может поднять слишком большой груз. В этом случае в мышечном волокне (миофибрилле) происходят процессы сокращения, при этом одни саркомеры укорачиваются, а другие — удлиняются. Ауксотонический режим (смешанный режим) характеризуется изменением и длины и тонуса мышцы. При этом режиме сокращения происходит перемещение груза. Этот режим также называется динамическим. Имеются две разновидности этого режима: преодолевающий (концентрический) — длина мышцы уменьшается, уступающий (эксцентрический) — длина мышцы увеличивается. Содержание физических упражнений – это действия, входящие в них, а также процессы, которые происходят в организме в ходе выполнения упражнения (психические, физиологические, биохимические и др.). Физические упражнения как произвольные движения опираются на сознание человека и направлены на достижение какого-то результаты. Выполнение физических упражнений связано с вниманием, мышлением, волевыми усилиями. Содержание физических упражнений следует рассматривать исходя из единства материальной и психической сторон. Содержание и форма физического упражнения неотделимы друг от друга, хотя между ними возможны некоторые противоречия или несоответствия. Термин «техника» относится к тем физическим упражнениям, которые сформированы с учётом закономерностей выполнения движений, Эффективность техники выражается в определенном воздействии на организм занимающихся или же в количественных показателях физического упражнения, т. е. его результативности. При этом необходимо учитывать степень физической и даже психической подготовленности учеников. Двигательные действия можно выполнять различными способами, но только наиболее рациональные можно назвать техникой. Эффективность техники физических упражнений постоянно совершенствуется, развивается. Основа техники – это главные, основные элементы упражнения, которые необходимы для решения двигательной задачи, т. е. те, которые отражают отличительные признаки одного упражнения от другого. Невыполнение, нарушение одного из элементов или последовательности элементов делают невозможным решение двигательной задачи этого упражнения, упражнение может быть не выполнено, искажено. Определяющее звено техники – наиболее важнейшая и решающая часть основы техники физического упражнения, которая выполняется обычно за короткий промежуток времени и требует больших мышечных усилий. (В прыжках – отталкивание, в метаниях – конечное усилие перед броском.) От этих частей упражнения зависит и его результативность. Детали техники – это второстепенные особенности физического упражнения, не являющиеся характерными для него. Они могут видоизменяться, т. е. придавать определенную индивидуальность выполнению упражнения каждым человеком. Детали техники зависят от морфологических и функциональных особенностей человека (ребенка), а также и от условий, в которых данное упражнение выполняется. Современная техника выполнения какого-либо упражнения строится на рациональной основе двигательного действия, являющейся одинаковой для всех исполнителей, т. е. имеется стандартная техника. При обучении детей следует уделять внимание индивидуализации техники, так как стандартная техника строится на основе анализа движений, выполняемых взрослыми. Индивидуализация техники имеет две стороны: 1) стандартную технику следует приспосабливать к особенностям обучаемого; 2) обучаемый должен изменять функциональные возможности организма в соответствии с техникой. При выполнении физических упражнений тело, а также его части могут перемещаться как в пространстве, так и относительно друг друга. Эффективность физического упражнения зависит от позы в процессе самого движения. Изменяя положение тела при выполнении упражнения, можно изменять и направление всех динамических опорных реакций, что ведет к ускорению тела в нужном и выгодном для данных условий направлении. Направление движения. От него зависит эффективность воздействия физических упражнений, а также и успешное выполнение поставленной двигательной задачи. Направление движения определяется внешними ориентирами или плоскостями тела (может определяться направление части тела к собственному туловищу). К основным направлениям тела человека принято относить: направления «вверх-вниз», «вперед-назад», «вправо-влево». В сгибательных движениях применяют термины «вперед» и «назад», при движениях в боковой плоскости (переднезадней) «вправо», влево», если движения выполняются в лицевой плоскости (наклоны в стороны); «направо», «налево» – термины для вращательных движений в горизонтальной плоскости (повороты направо, налево). Физические упражнения, их элементы выполняются с различной длительностью, т. е. различно затраченным временем. Зная величину длительности упражнения, а также и длительность его элементов, можно определять общий объём нагрузки и регулировать его. Темп движений зависит от массы тела. С изменением движения качественно изменяется структура движения (бег 180–200 шагов/минуту). Изменение темпа движений приводит к усилению или уменьшению физической нагрузки. Темп зависит от особенностей организма, от уровня овладения данным упражнением. К пространственно-временным характеристикам относят скорость движений и ускорение. «Скорость движений определяется отношением величины (длины) пути, пройденного телом или его частью к затраченному на это времени» (А. В. Кенеман, Д. В. Хухлаева, 1985, с. 47). Скорость измеряется в метрах в секунду. Если скорость постоянна, то движение называют равномерным; если скорость изменяется, то движение называют неравномерным. Выполняя упражнения, мы можем изменить их скорость и ускорение. Исходя из этого положения, движения могут быть резкими, начинающимися с больших скоростей, неравномерно ускоренные и неравномерно законченные. Важно учить детей управлять скоростью движений (выдерживать заданную, увеличивать и уменьшать ее). Динамические характеристики движений определяются силами, оказывающими влияние на движение тела человека. Эти силы делятся на внутренние и внешние. К внутренним силам относятся: пассивные силы опорно-двигательного аппарата (эластичность, вязкость мышц); активные силы двигательного аппарата (силы тяги мышц); реактивные силы (отраженные силы), возникающие при взаимодействии отдельных частей тела в процессе движения с ускорением.
|
|||||||||
|
|
Последнее изменение этой страницы: 2021-02-07; просмотров: 317; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.22.51.241 (0.073 с.) |
 (2.16)
(2.16)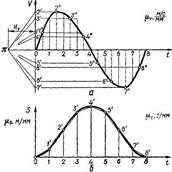 ки на оси ординат (например /', 2' и т. д.) лучами соединяются с полюсом
ки на оси ординат (например /', 2' и т. д.) лучами соединяются с полюсом  , выбранным по оси абсцисс на расстоянии Нv от начала координат. Затем в пределах соответствующих делений по оси абсцисс графика s = s (t) (рис. 2.5, б) последовательно проводят линии, параллельные лучам, исходящим из точки л. Очевидно, что масштаб перемещений интегрального графика
, выбранным по оси абсцисс на расстоянии Нv от начала координат. Затем в пределах соответствующих делений по оси абсцисс графика s = s (t) (рис. 2.5, б) последовательно проводят линии, параллельные лучам, исходящим из точки л. Очевидно, что масштаб перемещений интегрального графика  .
. , получившую название аналога угловой скорости. Связь между аналогом скорости и действительной угловой скоростью i -ro звена определится из соотношения
, получившую название аналога угловой скорости. Связь между аналогом скорости и действительной угловой скоростью i -ro звена определится из соотношения , т. е. угловая скорость i -го звена
, т. е. угловая скорость i -го звена  равна произведению угловой скорости ведущего звена
равна произведению угловой скорости ведущего звена  на аналог скорости. Продифференцировав уравнения (2.3) и подставив значение аналога скорости, получаем уравнения для определения угловой скорости шатуна
на аналог скорости. Продифференцировав уравнения (2.3) и подставив значение аналога скорости, получаем уравнения для определения угловой скорости шатуна  (рис. 2.2) и относительной скорости звена 3 —
(рис. 2.2) и относительной скорости звена 3 — 
 (2.17)
(2.17)

 параллельно направляющей поступательной пары 4 — 5 и
параллельно направляющей поступательной пары 4 — 5 и  — параллельно направляющей поступательной пары 5 — 6 до их пересечения в точке D5. Абсолютная скорость точки D5
— параллельно направляющей поступательной пары 5 — 6 до их пересечения в точке D5. Абсолютная скорость точки D5


 /
/ параллельно кривошипу 1 в направлении от точки В1 до А (рис. 2.6, b) в виде отрезка
параллельно кривошипу 1 в направлении от точки В1 до А (рис. 2.6, b) в виде отрезка  . Ускорение точки С ac = 0, следовательно, точка с б удет находиться в полюсе плана ускорений рa.
. Ускорение точки С ac = 0, следовательно, точка с б удет находиться в полюсе плана ускорений рa. и кориолисова
и кориолисова  определим по формулам, аналогичным формулам (2.11) и (2.12), пользуясь планом скоростей (рис. 2.6, б):
определим по формулам, аналогичным формулам (2.11) и (2.12), пользуясь планом скоростей (рис. 2.6, б):

 и
и откладываем на плане ускорений: первый от точки с параллельно звену 3 в направлении от точки В3 к точке С; направление второго отрезка определится поворотом вектора относительной скорости
откладываем на плане ускорений: первый от точки с параллельно звену 3 в направлении от точки В3 к точке С; направление второго отрезка определится поворотом вектора относительной скорости  вокруг своего начала (точки b2) в сторону направления вращения кулисы 3 (среды переноса). Через точки п и k проводим перпендикулярно к отрезкам сп и b2k линии действия ускорения
вокруг своего начала (точки b2) в сторону направления вращения кулисы 3 (среды переноса). Через точки п и k проводим перпендикулярно к отрезкам сп и b2k линии действия ускорения  и
и  .Пересечение этих линий даст точку b3, определяющую конец вектора ускорения точки
.Пересечение этих линий даст точку b3, определяющую конец вектора ускорения точки  .
. . Направление его можно установить, как указано ранее.
. Направление его можно установить, как указано ранее.
 откладываем его в виде отрезка
откладываем его в виде отрезка 
 точки D5 составим векторные уравнения:
точки D5 составим векторные уравнения:

 и
и  равны нулю вследствие того, что угловые скорости среды переноса w5 и w0 равны нулю. Поэтому через точки d4 и d0 (находящиеся в полюсе ра) проводим линии действия относительных ускорений
равны нулю вследствие того, что угловые скорости среды переноса w5 и w0 равны нулю. Поэтому через точки d4 и d0 (находящиеся в полюсе ра) проводим линии действия относительных ускорений  и
и  параллельно направляющим поступательных пар, образованных звеньями 4 — 5 и 5 — 0 соответственно.
параллельно направляющим поступательных пар, образованных звеньями 4 — 5 и 5 — 0 соответственно.




