
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Последовательность выполнения работы
В Control System Toolbox имеется тип данных, определяющих динамическую систему в виде комплексной передаточной функции. Синтаксис команды, создающий LTI-систему c одним входом и одним выходом в виде передаточной функции:
где TF([bm, …, b1, b0], [an, …, a1, a0]) bm, …, b1 – значения коэффициентов полинома В в (1.3); an, …, a1 – значения коэффициентов полинома A в (1.3). Для выполнения работы могут применяться команды, приведенные в таблице 1.1. (Л.р. №1). Для определения корней полиномов степени k, может, также, применяться команда MATLAB roots(P), которая, в качестве аргумента P, получает матрицу коэффициентов полинома [pk, …, p0]. Другим вариантом получения графиков динамических характеристик САУ является использование графического интерфейса ППП CST – LTI в viewer, вызов которого осуществляется командой ltiview, которой в качестве параметра можно указать имя переменной, содержащей LTI-объект. Таким образом, дальнейшее выполнение лабораторной работы состоит из следующих шагов: 1. Изучить теоретические сведения. 2. Запустить систему MATLAB. 3. Создать tf-объект, в соответствии с заданным вариантом. 4. Используя LTI-viewer, или соответствующие команды (табл.2.1) получить динамические характеристики – переходную функцию h(t), импульсно-переходную функцию w(t) и частотные характеристики – диаграмму Боде, частотный годограф Найквиста. 3.5.1. Пропорциональное звено Передаточная функция
где Создаём tf-объект для данной передаточной функции w=tf([5],[1]) Transfer function: 5 Построим переходную функцию командой step(w). Построим импульсную переходную функцию командой impulse(w).
Логарифмическую частотную характеристику (диаграмму Боде) получим, используя команду bode(w) Определим комплексно-частотную функцию (частотный годограф Найквиста), выполнив команду ny qui st(w)
Рис. 2.24. Переходная h(t) и импульсно-переходная функции пропорционального звена
Рис. 2.25. Логарифмические частотные характеристики, комплексно-частотная функция пропорционального звена 3.5.2. Апериодическое (инерционное) звено Передаточная функция
где Создаём tf-объект для данной передаточной функции w=tf([5],[0.1 1]) Transfer function: 5 --------- 0.1 s + 1 Построим переходную функцию командой step(w). Построим импульсную переходную функцию командой impulse(w).
Рис. 2.26. Переходная h(t) и импульсно-переходная функция инерционного звена
Логарифмическую частотную характеристику (диаграмму Боде) получим, используя команду bode(w)
Рис. 2.27. Логарифмические частотные характеристики инерционного звена
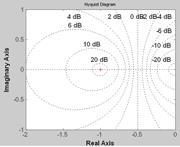
Определим комплексно-частотную функцию (частотный годограф Найквиста), выполнив команду ny qui st(w)
Рис. 2.28. Комплексно-частотная функция инерционного звена
3.5.3. Апериодическое звено второго порядка Передаточная функция
Создаём tf-объект для данной передаточной функции
w=tf([5],[0.02 0.3 1]) Transfer function: 5 -------------------- 0.02 s^2 + 0.3 s + 1
Построим переходную функцию командой step(w). Построим импульсную переходную функцию командой impulse(w).
Логарифмическую частотную характеристику (диаграмму Боде) получим, используя команду bode(w)
Рис. 2.29. Переходная h(t) и импульсно-переходная функции апериодического звена второго порядка
Рис. 2.30. Логарифмические частотные характеристики апериодического звена 2-го порядка
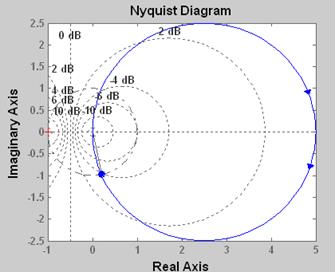
Определим комплексно-частотную функцию (частотный годограф Найквиста), выполнив команду ny qui st(w)
Рис. 2.31. Комплексно-частотная функция апериодического звена 2-го порядка
3.5.4. Колебательное звено Передаточная функция
При заданных постоянных параметрах k и T рассматриваются три варианта колебательных звеньев:
Создаём три варианта tf-объектов для передаточной функции колебательного звена (w1,w2,w3) w1=tf([5],[0.01 0.02 1]) Transfer function: 5 --------------------- 0.01 s^2 + 0.02 s + 1 w2=tf([5],[0.01 0.08 1]) Transfer function: 5 --------------------- 0.01 s^2 + 0.08 s + 1 w3=tf([5],[0.01 0.1414 1]) Transfer function: 5 ----------------------- 0.01 s^2 + 0.1414 s + 1 Построим переходные функции командой step(w1, w 2, w 3).
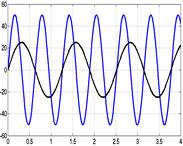
Рис. 2.32. Переходная функция h(t) колебательного звена
Построим импульсную переходную функцию командой impulse(w1, w 2, w 3).
Рис. 2.33. Импульсно-переходная функция колебательного звена Логарифмическую частотную характеристику (диаграмму Боде) получим, используя команду bode(w1, w 2, w 3)
Рис. 2.34 Логарифмические частотные характеристики колебательного звена
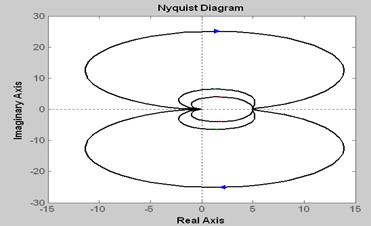
Определим комплексно-частотную функцию (частотный годограф Найквиста), выполнив команду ny qui st(w1, w 2, w 3)
Рис. 2.35. Комплексно-частотная функция колебательного звена
2.4.5.Консервативное звено
Передаточная функция
При заданном постоянном коэффициенте рассматриваются два варианта консервативных звеньев: T1=T, T2=2T. Создаём два варианта tf-объектов для передаточной функции консервативного звена (w1,w2) w1=tf([5],[0.01 0 1]) Transfer function: 5 ------------ 0.01s^2 + 1 >> w2=tf([5],[0.04 0 1]) Transfer function: 5 ------------ 0.04 s^2 + 1
Построим переходную функцию командой step(w1,w2). (a) Построим импульсную переходную функцию командой impulse(w1,w2). (б)
а) б)
Рис. 2.36. Переходная h(t) и импульсно-переходная функции консервативного звена
Логарифмическую частотную характеристику (диаграмму Боде) получим, используя команду bode (w1, w 2) Определим комплексно-частотную функцию (частотный годограф Найквиста), выполнив команду ny qui st(w1, w 2)
Рис. 2.37. Логарифмические частотные характеристики консервативного звена
ЛАБОРАТОРНАЯ РАБОТА №3 Исследование интегрирующих и дифференцирующих звеньев Цель работы: Математическое моделирование временных характеристик динамических звеньев. Изучение динамических свойств, частотных характеристик и оценка влияния параметров на свойства звеньев. Ознакомление с системами MATLAB и MathCAD. Применение этих систем для изучения динамических звеньев.
Программа работы 1. Математическое моделирование. Расчётно - экспериментальная часть 1.1. Ознакомиться с основами моделирования звеньев и систем управления с использованием пакета MATLAB-Simulink 1.2. По заданию преподавателя определить параметры звеньев и создать их модели 1.3. Расчёт временных характеристик исследуемых динамических звеньев: 1.3.1. Расчёт переходных функций h(t) и импульсных переходных (весовых) функций ω(t) динамических звеньев по методу структурного моделирования. 1.3.2. Аналитический расчет временных характеристик. Сравнить результаты расчета с моделированием. 1.3.3. Определение показателей переходных процессов исследуемых звеньев 1.4. Частотный анализ динамических звеньев с использованием пакета MATLAB-Simulink
2. Расчётно-графическая часть. Составление отчета по лабораторной работе 2.1. Представить цель и программу работы, содержание расчетно-экспериментальной части 2.2. Создаются модели динамических звеньев и задаются параметры этих звеньев 2.3. Приводятся соответствующие графики переходных функций h(t) и весовых функций w(t) рассматриваемых динамических звеньев 2.4. Производятся аналитический расчет временных характеристик h(t) и w(t) исследуемых звеньев. Сравнить результаты аналитического расчета с моделированием. Определяются показатели переходных процессов звеньев. 2.5. Приводятся результаты частотного анализа для динамических звеньев с использованием пакета MATLAB-Simulink, представляются временные характеристики, логарифмические частотные характеристики и комплексные частотные характеристики 2.6. Рассчитываются и строятся асимптотические ЛАЧХ L(w) и ЛФЧХ
2.7. Сделать выводы по работе
3. Порядок выполнения лабораторной работы
3.1. Как и при выполнении лабораторной работы №2 предварительно необходимо ознакомиться с основными сведениями по работе с пакетом МATLAB-Simulink, и выполнить работу №1. 3.2. Определение параметров моделей звеньев По данным задания определить параметры моделей следующих динамических звеньев.
3.2.1. Идеального интегрирующего (И)
3.2.2. Интегрирующего с замедлением
3.2.3. Пропорционально-интегрального (ПИ)
3.2.4. Пропорционально-дифференциального (ПД)
Рассматриваются два варианта ПД-звена: а) дифференцирующего типа
б) интегрирующего типа
3.2.5. Реального дифференцирующего (Д)
3.3. Расчёт временных характеристик исследуемых звеньев
3.3.1. Исследование временных характеристик динамических звеньев по методу структурного моделирования Для структурного моделирования используем систему MATLAB, основные методы работы с которой были рассмотрены ранее. Открывается программа MATLAB. В основном окне программы запускается библиотека Simulink. Создаётся новая модель. При создании моделей динамических звеньев используются следующие блоки Simulink. 1. Генератор ступенчатого сигнала Step из раздела Sources - источники сигналов(см. Л.р. №1). Назначение: формирует ступенчатый сигнал. 2. Блок передаточной функции Transfer Fcn из раздела Continuous – аналоговые блоки(см. Л.р. №1). Назначение: блок передаточной характеристики Transfer Fcn задает передаточную функцию в виде отношения полиномов:
Рис. 3.1 Блок, моделирующий генератор ступенчатого сигнала, и окно редактирования параметров блока
Рис.3.2 Блок мультиплексора и окно редактирования параметров блока
Рис. 3.3 Блок, моделирующий передаточную функцию и окно редактирования параметров блока 3. Осциллограф Scope из раздела Sinks - приемники сигналов(см. Л.р. №1). Назначение: строит графики исследуемых сигналов в функции времени. Позволяет наблюдать за изменениями сигналов в процессе моделирования. 4. Мультиплексор (смеситель) Mux из раздела Signal Routing (см. Л.р. №2). Назначение: объединяет входные сигналы в вектор. 5. Генератор сигнала Signal Builder – из раздела Sources – источники сигналов(см. Л.р. №2). Назначение: формирует один из трёх видов сигналов. Указанный сигнал, например, используется при расчёте на ПК импульсных переходных(весовых) функций динамических звеньев.
6. Переходные функции Для моделирования переходных функций используются три типа блоков. Первый – Step этот блок формирует единичный импульс. Второй – Transfer F с n задаёт передаточную функцию звена. Третий – Scope осциллограф, выводящий график переходной функции. Если сигналов несколько, как при пропорционально-интегральном, то используется ещё блок - Mux. 3.3.2. Исследование временных характеристик интегрирующих звеньев
|
||||||||
|
|
Последнее изменение этой страницы: 2021-03-09; просмотров: 127; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.219.208.117 (0.055 с.) |

























 (w) для заданных звеньев.
(w) для заданных звеньев. 












