
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Рсп сантиметрового диапазона ⇐ ПредыдущаяСтр 6 из 6
Основная часть РСП СД - угломерная подсистема, включающая азимутальный (АРМ) и угломестный (УРМ) радиомаяки, работающие поочередно на одной несущей частоте f 0 В РСП СД реализуется импульсный (временной) метод измерения угловых координат ЛА
Рис. 7.3. Зона сканирования ДНА УРМ (а), временная диаграмма сканирования (б) и принимаемые сигналы (в) в угломестном канале РСП СД ДНА радиомаяков АРМ и УРМ по полю имеют вид
где При такой ДНА сигналы С 1и С 2представляют собой импульсы с огибающей, повторяющей форму ДНА и длительностью Информативный параметр в РСП СД - интервал времени
В бортовой аппаратуре РСП СД интервал
Для определения интервала
где Влияние отражений от местных объектов в РСП СД проявляется в значительно меньшей степени, чем в РСП МД в силу сканирования и на порядок меньшей ширины ДНА. Появление отраженного от МО сигнала приводит к смещению
Рис.7.4. Смещение точки отсчета ТО при интерференции синфазных сигналов от РМ и МО Наибольшего значения погрешность достигает при разности угловых положений ЛА и МО погрешность Значение
где U пуровень напряжения помехи от МО в точке, соответствующей ДНА на уровне 0,7 от максимума. ДОПЛЕРОВСКИЕ ИЗМЕРИТЕЛИ СКОРОСТИ И РАДИОВЫСОТОМЕРЫ МАЛЫХ ВЫСОТ Справочный материал Измерители скорости (ДИС) Доплеровский сдвиг частоты (доплеровская частота)
где V - скорость ЛА; Величина V r =Vcos Антенна ДИС - обычно прямоугольная ФАР с размерами lx и lz =0,5 lx, формирующая трех лучевую Установочные углы лучей (рис. 8.1) в вертикальной плоскости В0 и горизонтальной плоскости Г0, а также в наклонных плоскостях Масштабные коэффициенты М i (размерностью (м/с)/Гц), определяющие связь
Рис. 8.1. Установочные углы луча ДНА ДИС Таблица 8.1.
Ширина ДНА, т.е. ширина каждого из лучей ДИС, определяет ширину спектра доплеровского сигнала, а следовательно и точность ДИС, и рассчитывается в связанной с носителем ДИС координатной системе ХУ Z. В вертикальных плоскостях, параллельных осям X и Z ширина ДНА
Для нахождения
Коэффициент усиления антенны ДИС
где Ширина спектра доплеровского сигнала, формируемого в результате геометрического сложения спектров, обусловленных конечной шириной ДНА в плоскостях углов
где
В этих формулах значение Эквивалентная спектральная плотность флуктуации (на нулевой частоте) на выходе частотного дискриминатора (ЧД) измерителя частоты ДИС, вызываемых шумом, действующим на входе ЧД, равна
где М i - масштабный коэффициент при i =х,у, z;
График этой функции приведен на рис. 8.2.
Рис. 8.2. Зависимость эквивалентной спектральной плотности G э от отношения сигнал/шум q Полная погрешность ДИС Флуктуационная шумовая погрешность
где В неследящих измерителях Флуктуационная методическая погрешность не зависит от q и определяется как
Погрешность смещения
Относительные значения погрешности смещения определяются из соотношений:
где
Рис. 8.3. Зависимость удельной эффективной площади рассеяния (ЭПР) морской поверхности от угла В0 при различном уровне волнения моря l м Коэффициент развязки передающего и приемного трактов ДИС определяется соотношением
где Частотная модуляция (ДИС ЧМ) позволяет уменьшить влияние просачивающегося сигнала передатчика на чувствительность приемного тракта и тем самым снизить требования к развязке:
где индексы «ЧМ» и «ИМ» относится соответственно к ДИС с ЧМ и ДИС с не-модулированным сигналом; kf = nF м/ F 0 - отношение частоты рабочей гармоники частоты модуляции (промежуточной частоты ДИС ЧМ) к Р 0=10 кГц, а k чм- коэффициент, характеризующий энергетический проигрыш ДИС ЧМ по сравнению с ДИС НМ. Этот коэффициент, равен
где [ Jn (m чм)]mах - амплитуда n -й гармоники частоты модуляции преобразованного сигнала (сигнала на выходе первого смесителя приемного тракта ДИС); l ЧМ - коэффициент потерь из-за влияния частотной модуляции. В табл. 8.2 для примера даны значения коэффициентов k чми kf а также составляющие l чм для первых трех гармоник частоты модуляции при F M=1 МГц. Таблица 8.2
Параметры зондирующего сигнала ДИС ЧМ можно рассчитать по заданному ослаблению рабочей гармоники просачивающегося сигнала Jn (m пc), где m пc–индекс частотной модуляции этого сигнала; п - номер рабочей гармоники. Девиацию частоты можно найти, воспользовавшись асимптотическим представлением функции Бесселя при малом аргументе:
где Оптимальный индекс частотной модуляции зондирующего сигнала (m чм1 ) опт = 0,5(n +2). Частота модуляции Слепые высоты определяются из соотношения
где k = 1, 2, 3,..., и повторяются через интервал Неследящий частотный радиовысотомер (РВ) Зондирующий сигнал - непрерывный с симметричной пилообразной частотной модуляцией (СПЧМ). Длина волны определяется из соотношения
где d a- размер апертуры антенны; Частота модуляции F м=1/ T м, где В задачнике принято, что Преобразованный сигнал (ПРС) - сигнал разностной частоты
где f изл и f прм частоты излучаемого и принимаемого сигналов. Разностная частота F p- информативный параметр неследящего частотного РВ: H = MFF p, где Ширина спектра ПРС
где Полная погрешность
составляющие которой определяются из следующих соотношений: флуктуационная шумовая погрешность
где q - отношение сигнал/шум на измеряемой высоте;
погрешность смещения
погрешность дискретности отсчета частоты
Следящий частотный РВ Некоторые параметры следящего частотного РВ определяются теми же соотношениями, что и в неследящем РВ. К числу таких параметров относятся: длина волны Зондирующий сигнал - непрерывный с несиметричной пилообразной частотной модуляцией (НСПЧМ) и переменной модулирующей частотой F M. Период модуляции Т м = 1 / F мявляется информативным параметром РВ:
H = MTT М, где Преобразованный сигнал (ПРС) в режиме поиска по высоте имеет переменную разностную частоту которая изменяется до тех пор, пока Fp не станет примерно равной F p0, когда ПРС попадет в полосу пропускания
Рис. 8.4. Изменение периода модуляции Тм (а) и разностной частоты Fp (б) в режиме поиска при длительности поиска ТП В режиме слежения F p = F p 0 = const. При этом текущее значение периода модуляции Оптимизация следящего измерителя частоты (СИЧ) радиовысотомера выполняется для определенной высоты Н опт, на которой требуется минимальное значение суммарной погрешности СИЧ:
где Таблица 8.3
Первая колонка таблицы соответствует степени астатизма (СА) СИЧ. Обозначения v H и а H - скорость и ускорение по высоте, а Рекомендуется принять постоянную времени инерционного звена Т 2 = 1с. В оптимальном режиме Эквивалентная спектральная плотность (на нулевой частоте) флуктуации на выходе частотного дискриминатора СИЧ
где q э = q 2/(1+ q) - эквивалентное значение отношения сигнал/шум q на входе СИЧ. Полная погрешность РВ
Погрешность смещения
Флуктуационная методическая погрешность
Погрешность
Основные параметры измерителя периода модуляции - информативного параметра сигнала следящего частотного РВ. Цена младшего разряда кода высоты
где Период следования счетных импульсов цифрового измерителя
где М г - масштабный коэффициент по периоду. Емкость счетчика счетных импульсов N сч= T мmах/ T си, где T мmах - максимальное значение периода модуляции.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-01-08; просмотров: 144; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.221.165.246 (0.09 с.) |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 5ГГц (
5ГГц ( 6 см).
6 см). где
где  (в АРМ) или
(в АРМ) или  (в УРМ), заключающийся в измерении (цифровым методом) интервала
(в УРМ), заключающийся в измерении (цифровым методом) интервала  между импульсами C 1 я С 2, принимаемыми на ЛА при проходе ДНА радиомаяка через точку приема (рис. 7.3). Антенна радиомаяка излучает непрерывный немодулированный сигнал, а ее ДНА сканирует в плоскости утла
между импульсами C 1 я С 2, принимаемыми на ЛА при проходе ДНА радиомаяка через точку приема (рис. 7.3). Антенна радиомаяка излучает непрерывный немодулированный сигнал, а ее ДНА сканирует в плоскости утла  (в горизонтальной плоскости в АРМ или в вертикальной плоскости в УРМ) со скоростью
(в горизонтальной плоскости в АРМ или в вертикальной плоскости в УРМ) со скоростью  обычно равной
обычно равной  = 0,02 °/мкс.
= 0,02 °/мкс.

 - ширина ДНА по уровню 0,7 (-3 дБ) от максимума значение которой порядка нескольких градусов.
- ширина ДНА по уровню 0,7 (-3 дБ) от максимума значение которой порядка нескольких градусов.

 сравнивается с заданным для данного ЛА временем
сравнивается с заданным для данного ЛА временем  соответствующим
соответствующим  при нахождении ЛА на оптимальной для него ТЗП. Отклонение ЛА от этой ТЗП
при нахождении ЛА на оптимальной для него ТЗП. Отклонение ЛА от этой ТЗП
 а следовательно и
а следовательно и  можно использовать соотношение
можно использовать соотношение
 - сектор сканирования ДНД;
- сектор сканирования ДНД;  - угловая координата ЛА; Т пз - длительность паузы между сканированиями ДНА в прямом и обратном направлениях.
- угловая координата ЛА; Т пз - длительность паузы между сканированиями ДНА в прямом и обратном направлениях. точки отсчета и интервала
точки отсчета и интервала  на переднем фронте импульса С 1и на заднем фронте импульса С 2(рис. 7.4), а следовательно к погрешности
на переднем фронте импульса С 1и на заднем фронте импульса С 2(рис. 7.4), а следовательно к погрешности  определения отклонения ЛА от ЗТП.
определения отклонения ЛА от ЗТП.
 когда максимум отраженного сигнала соответствует точке отсчета (ТО) интервала
когда максимум отраженного сигнала соответствует точке отсчета (ТО) интервала  Можно считать, что при
Можно считать, что при 
 отсутствует, если МО точечный.
отсутствует, если МО точечный. можно определить, найдя крутизну фронта импульса S ф, определяемую крутизной ДНА в ТО на уровне 0,7 от максимума сигнала (т.е. в точке отсчета интервала
можно определить, найдя крутизну фронта импульса S ф, определяемую крутизной ДНА в ТО на уровне 0,7 от максимума сигнала (т.е. в точке отсчета интервала  )
)

 - длина волны сигнала, излучаемого ДИС;
- длина волны сигнала, излучаемого ДИС;  - угол между вектором скорости V и направлением прихода отраженного сигнала.
- угол между вектором скорости V и направлением прихода отраженного сигнала. - радиальная скорость.
- радиальная скорость. -образную ДНА.
-образную ДНА. и V0 должны выдерживаться строго постоянными, так как их значения определяют измеряемый сдвиг частоты F д При заданных В0 и Г0 углы
и V0 должны выдерживаться строго постоянными, так как их значения определяют измеряемый сдвиг частоты F д При заданных В0 и Г0 углы  и
и  определяются из соотношений:
определяются из соотношений: где
где  и
и  - СКП измерения V и Fд приведены в табл. 8.1.
- СКП измерения V и Fд приведены в табл. 8.1.



 равна
равна
 в наклонных плоскостях, содержащих углы
в наклонных плоскостях, содержащих углы 
 и В0, (при
и В0, (при  <10°) используют приближенные соотношения:
<10°) используют приближенные соотношения:



 - коэффициент, полезного действия антенны, а значения
- коэффициент, полезного действия антенны, а значения  .и
.и  подставляются в градусах.
подставляются в градусах. и
и  определяется как
определяется как

 а составляющие
а составляющие  и
и  характеризуют расширение спектра из-за влияния вертикальной скорости ЛА:
характеризуют расширение спектра из-за влияния вертикальной скорости ЛА:

 и
и  заданы в градусах.
заданы в градусах.
 - ширина спектра флуктуации на входе ЧД (считается, что
- ширина спектра флуктуации на входе ЧД (считается, что  определяется полосой пропускания соответствующего фильтра, равной ширине спектра сигнала
определяется полосой пропускания соответствующего фильтра, равной ширине спектра сигнала  ), a F (q)- функция, характеризующая зависимость Gэ от отношения сигнал/шум q на входе ЧД:
), a F (q)- функция, характеризующая зависимость Gэ от отношения сигнал/шум q на входе ЧД:

 где
где  - флуктуационная шумовая погрешность, вызываемая флуктуа-циями на входе ЧД;
- флуктуационная шумовая погрешность, вызываемая флуктуа-циями на входе ЧД;  - методическая флуктуационная погрешность, определяемая шумовым характером спектра доплеровского сигнала;
- методическая флуктуационная погрешность, определяемая шумовым характером спектра доплеровского сигнала;  - погрешность смещения средней частоты доплеровского сигнала из-за влияния характера отражающей поверхности.
- погрешность смещения средней частоты доплеровского сигнала из-за влияния характера отражающей поверхности.
 - полоса пропускания измерителя частоты ДИС.
- полоса пропускания измерителя частоты ДИС. F и=1/ T н, где Т н - время наблюдения сигнала (в многоканальных ДИС T н=10с).
F и=1/ T н, где Т н - время наблюдения сигнала (в многоканальных ДИС T н=10с).




 - крутизна функции
- крутизна функции  описывающей изменение удельной эффективной площади рассеяния отражающей поверхности в точке, соответствующей углу В0 (оси ДНА) в децибелах на градус, определяется но графику, приведенному на рис. 8.3
описывающей изменение удельной эффективной площади рассеяния отражающей поверхности в точке, соответствующей углу В0 (оси ДНА) в децибелах на градус, определяется но графику, приведенному на рис. 8.3

 - допустимое или расчетное увеличение коэффициента шума приемника из-за шумов, вносимых просочившимся сигналом, k Т
- допустимое или расчетное увеличение коэффициента шума приемника из-за шумов, вносимых просочившимся сигналом, k Т  4 10"21 Вт/Гц - произведение постоянной Больцмана на шумовую температуру приемного тракта (принято, что Т = 293° К); k ПС, зависящий от частоты коэффициент уменьшения отношения суммарной спектральной плотности боковых составляющих шума генератора ДИС и вибрационных шумов (в полосе 1 Гц) к мощности составляющей на несущей частоте; P1 - мощность генератора ДИС. Приемлемое при реализации ДИС значение k p
4 10"21 Вт/Гц - произведение постоянной Больцмана на шумовую температуру приемного тракта (принято, что Т = 293° К); k ПС, зависящий от частоты коэффициент уменьшения отношения суммарной спектральной плотности боковых составляющих шума генератора ДИС и вибрационных шумов (в полосе 1 Гц) к мощности составляющей на несущей частоте; P1 - мощность генератора ДИС. Приемлемое при реализации ДИС значение k p  -90 дБ.
-90 дБ.


 - девиация частоты;
- девиация частоты;  - время задержки просочившегося сигнала при распространении от передатчика до приемника.
- время задержки просочившегося сигнала при распространении от передатчика до приемника. Однозначное измерение F д, а следовательно и скорости, возможно только при F д < 0,5 F M.
Однозначное измерение F д, а следовательно и скорости, возможно только при F д < 0,5 F M.
 определяемый этой формулой при k =1.
определяемый этой формулой при k =1.
 - ширина диаграммы направленности. Девиация частоты
- ширина диаграммы направленности. Девиация частоты  = с/(4 H 0), где H 0 - дискрет по высоте.
= с/(4 H 0), где H 0 - дискрет по высоте. =2 H mах/с.
=2 H mах/с.

 - масштабный коэффициент
- масштабный коэффициент
 - эквивалентная ширина ДНА РВ.
- эквивалентная ширина ДНА РВ.

 - коэффициент неоптимальности обработки сигнала;
- коэффициент неоптимальности обработки сигнала; - полоса пропускания приемного тракта (обычно
- полоса пропускания приемного тракта (обычно  );
);  - полоса пропускания измерителя частоты F p, обратная времени наблюдения сигнала T н; методическая флуктуационная погрешность
- полоса пропускания измерителя частоты F p, обратная времени наблюдения сигнала T н; методическая флуктуационная погрешность


 дискрет по высоте H 0, девиация частоты
дискрет по высоте H 0, девиация частоты  ширина спектра преобразованного сигнала
ширина спектра преобразованного сигнала  масштабный коэффициент по частоте M F и методическая погрешность
масштабный коэффициент по частоте M F и методическая погрешность 
 - масштабный коэффициент по периоду.
- масштабный коэффициент по периоду. узкополосного фильтра, сработает обнаружитель и РВ перейдет в режим слежения за высотой (рис. 8.4).
узкополосного фильтра, сработает обнаружитель и РВ перейдет в режим слежения за высотой (рис. 8.4).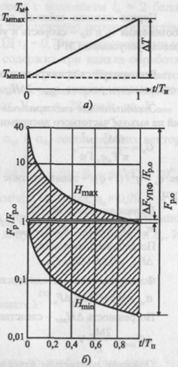


 и
и  - флуктуационная и динамическая погрешности СИЧ, определяемые из табл. 8.3.
- флуктуационная и динамическая погрешности СИЧ, определяемые из табл. 8.3.








 - оптимальная полоса пропускания СИЧ.
- оптимальная полоса пропускания СИЧ.




 - следствие составляющей скорости VH:
- следствие составляющей скорости VH:

 - суммарная погрешность следящего измерителя;
- суммарная погрешность следящего измерителя;  - погрешность дискретности отсчета Т м.
- погрешность дискретности отсчета Т м.



