
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Измерение дальности импульсным методом
Основное уравнение
где Для дальнометрии используют простые сигналы (импульсы длительностью Масштабный коэффициент М=0,5с м/с в активном радиодальномере, М = с м/с в пассивном радиодальномере. Условие однозначного измерения для активного дальномера
Разрешающая способность по дальности
Число каналов дальности многоканального измерителя дальности
где Измерение радиальной скорости Радиальная скорость
где V - скорость ЛА; Основное уравнение
где
где При многоканальном (параллельном) анализе спектра число каналов (число каналов скорости) где Определение пройденного пути (счисление пути)
где V (t)- текущая скорость;
где S ист - истинное значение пройденного пути; Амплитудные радиопеленгаторы определяют азимут
где R - расстояние до пеленгуемого объекта. ДАЛЬНОСТЬ ДЕЙСТВИЯ И ТОЧНОСТЬ РНУ И РНС
Справочный материал Дальность действия В данном разделе приведены соотношения для расчета дальности действия РНУ, вытекающие из формулы, характеризующей дальность действия радиолокационной системы или устройства [2]:
где R max - дальность действия; R maх0 - то же при отсутсвии поглощения энергии радиоволны в среде распространения (в свободном пространстве); Р 1 - мощность передатчика; При необходимости можно использовать выражение
и перейти к эффективным площадям используемых антенн S a. Дальность действия РНУ в свободном пространстве
где учтена необходимость обеспечить прием сигналов с любого направления при использовании ненаправленных антенн с G al = G a2 ^ = 1, и заменены P порна минимальную мощность принимаемого сигнала Pmin, при которой обеспечивается заданная точность измерения информативного параметра этого сигнала. Дальность действия РНУ при активном ответе рассчитывается обычно в предположении, что дальность действия запросчика равна дальности действия ответчика R max зап= R max от, т.е.
В частном случае работы РНУ в импульсном режиме, когда одна антенна используется для передачи и приема сигналов, а КПД фидерных трактов близки к единице, Дальность действия активных РНУ, использующих отраженный от земной поверхности сигнал, (высотность РНК)
где Обычно
Дальность прямой видимости при учете рефракции в тропосфере
где H 1 и H 2 - высоты подъема антенн РНУ над земной поверхностью, выраженные, как и R пвв километрах. Значение R пвограничивает дальность действия всех РНУ, работающих в УКВ диапазоне Погрешности местоопределения и рабочие зоны Погрешности определения линии положения
где k лп- коэффициент погрешности определения линии положения с размерностью единицы длины/единицы элемента W и считается, что погрешности
В дальномерном РНУ
В угломерном РНУ
В разностно-дальномерном РНУ уравнение линии положения (гиперболы) имеет вид
где Б - расстояние между передатчиками РНУ(база РНУ); R Аи R B- дальности точки приема от передатчиков, и
где Тогда погрешности определения линий положения будут: в дальномере Рабочая зона дальномерной РНС характеризуется следующими параметрами: размером базы Б, т.е. расстоянием между пунктами А и В размещения дальномеров РНС; допустимой погрешностью местоопределения Считается, что
При
Рис. 2.1. Рабочая зона дальномерной РНС (часть второй половины зоны показана пунктиром) Радиус рабочей зоны Наибольшее значение геометрического фактора
Рабочая зона угломерно-дальномерной РНС рассчитывается по формулу
где Контур рабочей зоны - окружность, соответствующая Рабочая зона угломерной РНС при
где
где p = 0,5(Б+ R 1, + R 2 ) - полупериметр треугольника, образованного R 1, R 2 и базой Б; r - радиус вписанной в этот треугольник окружности
Наибольшая точность местоопределения достигается на нормали к базе Б. Угол
где R - расстояние от центра базы до объекта навигации, а Спутниковые РНС Справочный материал Спутниковые РНС (СРНС) представляют собой средство навигации в любой точке земного шара, обслуживающее потребителей (П) высокоточной информацией. Основой СРНС является сеть передающих радиостанций, расположенных на навигационных спутниках (НС) Земли, двигающихся по известным орбитам. Местоположение П определяется по результатам измерения дальности R от потребителя до спутника или разности дальностей потребителя до двух спутников
Типы СРНС Дапъномерные СРНС, отличающиеся очень высокими требованиями к стабильности бортового опорного генератора П (порядка 10-13 за время работы), и требующие для определения местоположения П в пространстве трех НС, до которых измеряются дальности
где Xi Yi, Zi, - известные координаты i -го НС; х,у, z - искомые координаты П. Квазидальномерные СРНС, не требующие очень высокой стабильности опорного генератора ценой введения в рабочее созвездие НС четвертого НС и измерения квазидальности
где Разностно-дальномерные СРНС, в которых результат измерения не зависит от расхождения шкал времени СРНС и потребителя:
Геометрический фактор Г - точность нахождения местоположения В дальномерных и квазидальномерных СРНС
где В разностно-дальномерной СРНС
где углы Обычно в зоне видимости П находятся не менее шести НС, что позволяет выбрать те из них, для которых геометрический фактор минимален. Зона действия каждого НС определяется высотой его орбиты (
где R 3 = 6370 км - радиус Земли, H - высота орбиты НС. Мощность сигнала на входе приемника П в зоне действия НС
где Р 1 - мощность передатчика НС; G al - коэффициент усиления передающей антенны НС; G a2 - коэффициент усиления приемной антенны П;
фидерных линий передающей (на НС) и приемной (на П) антенн; Навигационные сигналы со спутников обычно излучаются спиральными антеннами. Осуществляется осевое излучение вдоль оси спирали, при котором диаметр спирали лежит в пределах
Шаг S определяется длиной антенны и количеством витков. Ширину ДН спиральной антенны можно определить как
а ее коэффициент усиления в максимуме ДНА как
Дальномерные коды, служащие для измерения дальности и скорости в СРНС, представляют собой М-последователъности, которые обладают малым уровнем боковых лепестков двумерной корреляционной функций (ДКФ), формируемой при измерениях в аппаратуре П, практически ортогональны с другими М-последовательностями и просты в реализации. М-последовательности формируют с использованием образующих полиномов вида Р(х) = 1 + х +х2 +... + хт, где т Многочлену Р(х) соответствует код - последовательность символов (элементов)
где а - одноразрядные числа (1 или 0), знак
Период повторения кода определяется соотношением:
где N Э - число элементов кода, а Исходным при формировании кода является заданный уровень боковых лепестков ДКФ, равный
по которому определяют «память» кода т, вид образующего полинома и число его элементов N Э,. Для формирования кода необходим регистр сдвига, содержащий т ячеек задержки (триггеров} с обратными связями от элементов образующего полинома Период повторения кода определяет значение однозначно измеряемой дальности: R од Опознавание НС производится либо путем присвоения каждому из НС индивидуальных отличий излучаемого кода, либо по несущей частоте, когда частоты, на которых излучаются сигналы, формируются по правилу
где f 0 - номинальное значение несущей частоты спутника, Погрешности СРНС, вызываемые рефракцией радиоволн, делятся на тропосферные и ионосферные. Тропосферная погрешность определяется как
где Ионосферная погрешность может быть найдена из соотношения
где Для учета Дифференциальный режим СРНС предусматривает коррекцию координат или навигационных параметров, измеренных потребителем, по результатам определения аналогичных данных по тем же спутникам на контрольной станции (КС) с известными координатами. Результирующая точность системы в этом режиме доходит до погрешностей (в том числе и вызываемых рефракцией), практически одинаковых у потребителя и на КС.
|
||||||||||
|
|
Последнее изменение этой страницы: 2021-01-08; просмотров: 376; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.137.218.230 (0.078 с.) |

 - задержка принимаемого сигнала относительно сигнала, излучаемого передатчиком радиодальномера.
- задержка принимаемого сигнала относительно сигнала, излучаемого передатчиком радиодальномера. повторяющиеся с периодом
повторяющиеся с периодом  ) или периодические сигналы, состоящие из элементов
) или периодические сигналы, состоящие из элементов  фаза которых меняется в соответствии с дальномерным кодом. повторяющимся с периодом Т ак.
фаза которых меняется в соответствии с дальномерным кодом. повторяющимся с периодом Т ак.


 - диапазон измеряемых дальностей.
- диапазон измеряемых дальностей.
 - угол между вектором v и линией визирования ЛА.
- угол между вектором v и линией визирования ЛА.
 - доплеровское смещение частоты принимаемо сигнала(/прм) относительно несущей частоты излучаемого сигнала (f 0), а М - масштабный коэффициент
- доплеровское смещение частоты принимаемо сигнала(/прм) относительно несущей частоты излучаемого сигнала (f 0), а М - масштабный коэффициент  - в активном измерителе скорости;
- в активном измерителе скорости;  м -в пассивном измерителе скорости, где
м -в пассивном измерителе скорости, где  - длина волны сигнала
- длина волны сигнала  Разрешающая способность по скорости
Разрешающая способность по скорости
 - разрешающая способность по частоте, определяемая шириной полосы пропускания
- разрешающая способность по частоте, определяемая шириной полосы пропускания  фильтра анализатора спектра, используемого для измерения частоты:
фильтра анализатора спектра, используемого для измерения частоты: 

 - диапазон измеряемых частот.
- диапазон измеряемых частот.
 - погрешность измерителя скорости; Т р - время работы системы счисления. При постоянных V и
- погрешность измерителя скорости; Т р - время работы системы счисления. При постоянных V и 

 - нарастающая со временем погрешность счисления. Измерение азимута амплитудным радиопеленгатором
- нарастающая со временем погрешность счисления. Измерение азимута амплитудным радиопеленгатором с помощью слабона правленных антенн (в частности рамочных), реагирующих на вектор Пойнтинга электромагнитного поля принимаемого сигнала Пс. При наличии помехи Пп радиопеленгатор реагирует на вектор Пойнтинга
с помощью слабона правленных антенн (в частности рамочных), реагирующих на вектор Пойнтинга электромагнитного поля принимаемого сигнала Пс. При наличии помехи Пп радиопеленгатор реагирует на вектор Пойнтинга  суммарного сигнала и помехи, что приводит к погрешности измерения азимута
суммарного сигнала и помехи, что приводит к погрешности измерения азимута  и соответствующей линейной погрешности
и соответствующей линейной погрешности  (см. рис. 2.11 [1])
(см. рис. 2.11 [1])

 и
и  - КПД фидерных линий передатчика и приемника; G al и G a2 - коэффициенты усиления передающей и приемной антенн;
- КПД фидерных линий передатчика и приемника; G al и G a2 - коэффициенты усиления передающей и приемной антенн;  - длина волны сигнала;
- длина волны сигнала;  - средняя эффективная площадь рассеяния цели (ЭПР); Рпор - пороговая (минимальная) мощность принимаемого сигнала, необходимая для обнаружения цели;
- средняя эффективная площадь рассеяния цели (ЭПР); Рпор - пороговая (минимальная) мощность принимаемого сигнала, необходимая для обнаружения цели;  - удельные коэффициенты поглощения в газах, парах, пыли, гидрометеорах и других метеообразованиях, присутствующих в среде распространения радиоволн;
- удельные коэффициенты поглощения в газах, парах, пыли, гидрометеорах и других метеообразованиях, присутствующих в среде распространения радиоволн;  - протяженность этих образований.
- протяженность этих образований.



 - угол наклона диаграммы направленности антенны РНУ от горизонтали (угол визирования отражающей площадки),
- угол наклона диаграммы направленности антенны РНУ от горизонтали (угол визирования отражающей площадки),  - удельная ЭПР отражающей площадки с размерностью м2/м2, зависящая от угла
- удельная ЭПР отражающей площадки с размерностью м2/м2, зависящая от угла  и от типа отражающей поверхности.
и от типа отражающей поверхности. задают в децибелах, а для пересчета в безразмерные значения используют формулу
задают в децибелах, а для пересчета в безразмерные значения используют формулу

 и СКП измерения геометрического элемента
и СКП измерения геометрического элемента  (дальность, угловые координаты и т.п.) связаны соотношением
(дальность, угловые координаты и т.п.) связаны соотношением
 распределены по гауссовскому закону с нулевым средним значением и дисперсией
распределены по гауссовскому закону с нулевым средним значением и дисперсией  а определение местоположения производится на плоскости. Коэффициент к лпвыражается через градиент элемента W в декартовой системе координат:
а определение местоположения производится на плоскости. Коэффициент к лпвыражается через градиент элемента W в декартовой системе координат:



 - угол между R Aи R B, т.е. угол, под которым «видна» база Б из точки приема сигналов.
- угол между R Aи R B, т.е. угол, под которым «видна» база Б из точки приема сигналов. в пеленгаторе
в пеленгаторе  (
( выражается в радианах), а в разностно-дальномерном РНУ
выражается в радианах), а в разностно-дальномерном РНУ 
 углом
углом  при котором обеспечивается заданное значение
при котором обеспечивается заданное значение  погрешностями дальномеров
погрешностями дальномеров  и
и 
 и погрешности некоррелированы. Тогда кривые равной точности представляют собой окружности, опирающиеся на базу как на хорду:
и погрешности некоррелированы. Тогда кривые равной точности представляют собой окружности, опирающиеся на базу как на хорду:
 и
и  получаем уравнение для кривой равной точности (рис. 2.1)
получаем уравнение для кривой равной точности (рис. 2.1)  ограничивающей рабочую зону РНС:
ограничивающей рабочую зону РНС: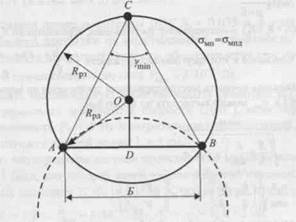

 а координаты центра 0 окружности х = 0;
а координаты центра 0 окружности х = 0; 

 = (90°- угол пересечения линии положения ЛП1 соответствующей R = = const, и ЛП2, на которой
= (90°- угол пересечения линии положения ЛП1 соответствующей R = = const, и ЛП2, на которой  );
);  и
и  - СКП измерения дальности R и азимута
- СКП измерения дальности R и азимута  R - измеряемая дальность. Здесь
R - измеряемая дальность. Здесь  выражается в радианах.
выражается в радианах. где
где  - допустимая точность местоопределения.
- допустимая точность местоопределения. определяется из соотношения
определяется из соотношения
 - угол пересечения линий положения;
- угол пересечения линий положения;  и
и  - погрешности измерения угломерных РНУ в радианах; R 1, и R 2 - расстояния от определяющего свое местоположение объекта до угломерных РНУ, находящихся на удалении Б (базы РНС) друг от друга. Обычно считается, что погрешности РНУ некоррелированы. Для определения угла
- погрешности измерения угломерных РНУ в радианах; R 1, и R 2 - расстояния от определяющего свое местоположение объекта до угломерных РНУ, находящихся на удалении Б (базы РНС) друг от друга. Обычно считается, что погрешности РНУ некоррелированы. Для определения угла  можно воспользоваться выражением
можно воспользоваться выражением
 и
и  можно вычислить по формулам:
можно вычислить по формулам:
 - угол между нормалью к центру базы и этим объектом.
- угол между нормалью к центру базы и этим объектом. = R 1- R 2. Навигационный параметр R или
= R 1- R 2. Навигационный параметр R или  измеряется аппаратурой П пассивным методом по сигналам НС, для чего все элементы СРНС работают синхронно с единой высокоточной шкалой времени, используя соотношение: tR = R /с, где tR - измеряемое время прохождения сигнала от НС до П.
измеряется аппаратурой П пассивным методом по сигналам НС, для чего все элементы СРНС работают синхронно с единой высокоточной шкалой времени, используя соотношение: tR = R /с, где tR - измеряемое время прохождения сигнала от НС до П.

 - расхождение шкал времени СРНС и потребителя.
- расхождение шкал времени СРНС и потребителя.
 В многопозиционных системах, в том числе и в СРНС:
В многопозиционных системах, в том числе и в СРНС:  где
где  - средняя квадратическая погрешность измерения навигационного параметра W.
- средняя квадратическая погрешность измерения навигационного параметра W.
 - угол пересечения линий положения двух дальномеров, равный в дально-мерной системе углу между прямыми, соединяющими П с двумя НС.
- угол пересечения линий положения двух дальномеров, равный в дально-мерной системе углу между прямыми, соединяющими П с двумя НС.
 и
и  показаны на рис. 3.2 [1].
показаны на рис. 3.2 [1]. 20000 км) и шириной ДНА
20000 км) и шириной ДНА  его антенны (около 40°). В этой зоне могут обслуживаться все потребители, находящиеся на высоте от 0 до h от земной поверхности. Значение h определяется из соотношения
его антенны (около 40°). В этой зоне могут обслуживаться все потребители, находящиеся на высоте от 0 до h от земной поверхности. Значение h определяется из соотношения

 и
и  КПД
КПД - длина волны сигнала; R - дальность от НС до П.
- длина волны сигнала; R - дальность от НС до П. фазовая скорость равна V ф
фазовая скорость равна V ф  с, а число витков N =7. Между длиной витка L и его шагом S существует соотношение
с, а число витков N =7. Между длиной витка L и его шагом S существует соотношение


 34 - «память» кода, определяющая основные параметры кода. Показатель степени (верхний индекс) указывает на наличие i -го слагаемого этого многочлена.
34 - «память» кода, определяющая основные параметры кода. Показатель степени (верхний индекс) указывает на наличие i -го слагаемого этого многочлена.
 означает сложение по модулю 2. Коэффициенты а рассчитывают по рекуррентному правилу:
означает сложение по модулю 2. Коэффициенты а рассчитывают по рекуррентному правилу:

 - их длительность.
- их длительность.
 Произвольно выбранное состояние т триггеров регистра соответствует начальному блоку кода, т.е. первым т коэффициентам а. Остальные коэффициенты, начиная с ат +1рассчитываются по приведенному выше рекуррентному правилу.
Произвольно выбранное состояние т триггеров регистра соответствует начальному блоку кода, т.е. первым т коэффициентам а. Остальные коэффициенты, начиная с ат +1рассчитываются по приведенному выше рекуррентному правилу. cT пк
cT пк
 =0,5 МГц - интервал между несущими частотами соседних по частоте спутников, к = 1, 2,...,24 -номер НС.
=0,5 МГц - интервал между несущими частотами соседних по частоте спутников, к = 1, 2,...,24 -номер НС.
 - зенитный угол НС, т.е. угол между местной вертикалью в точке нахождения потребителя и направлением на НС, N (H) = [ n (H) - 1] - 10 6 - индекс рефракции, зависящий от коэффициента преломления п (Н), Н п и Н т - высоты точек, где находятся потребитель и верхняя граница тропосферы.
- зенитный угол НС, т.е. угол между местной вертикалью в точке нахождения потребителя и направлением на НС, N (H) = [ n (H) - 1] - 10 6 - индекс рефракции, зависящий от коэффициента преломления п (Н), Н п и Н т - высоты точек, где находятся потребитель и верхняя граница тропосферы.
 - неизвестная функция, зависящая от высоты спутника Н с, зенитного угла
- неизвестная функция, зависящая от высоты спутника Н с, зенитного угла  и концентрации электронов в ионосфере N Э, f - несущая частота сигнала НС (в мегагерцах).
и концентрации электронов в ионосфере N Э, f - несущая частота сигнала НС (в мегагерцах). и исключения
и исключения  производят измерения на двух частотах f 1, и f 2 одной и той же дальности.
производят измерения на двух частотах f 1, и f 2 одной и той же дальности. = (2-3)м за счет исключения сильно коррелированных
= (2-3)м за счет исключения сильно коррелированных


