
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Масса элементов органов управления
Под органами управления обычно называют систему создания поперечных усилий, а также усилий, создающих аэродинамический момент в связанной системе координат, Среди возможных различных вариантов управления ракет с РДТТ можно выделить следующие устройства и способы создания управляющих усилий. 1. Поворотные сопловые системы, к ним относятся: одно, два или четыре поворотных сопла (между камерой и соплом – разъем с уплотнением). Сопловые насадки, а именно: поворотная выходная секция сопла, кольцевой сферический руль – дефлектор и выдвижные управляющие щитки. 3. Струйные органы изменения направления тяги: впрыск жидкости или вдув газа в закритическую часть сопла. 4. Блок управляющих твёрдотопливных двигателей. 5. Рулевые сопла (для управления по крену). 6. Аэродинамические рули; 7. Газовые рули.
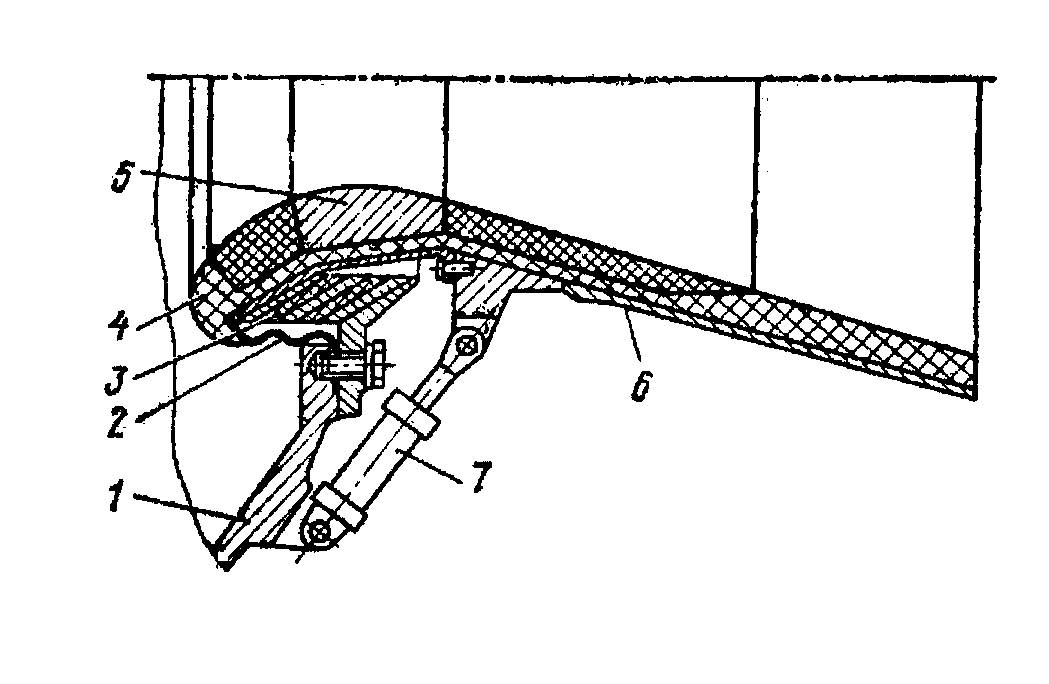
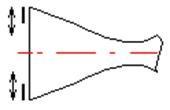
Основная задача этих устройств – создание управляющих моментов по трем осям ракеты: тангажу, курсу (рысканию) и крену. Нагрузки на органы управления неравномерны по траектории полета. В частности, высокие требования к органам управления предъявляются на атмосферном участке траектории. Не смотря на многообразие средств и способов управления вектором тяги, наиболее эффективными на наш взгляд можно считать системы, работающие по принципу обеспечения управления за счёт поворота либо всего сопла или его части. Остановимся более подробно на некоторых из них На рис. 14 показана конструктивная схема поворотного сопла, отклоняемого в одной плоскости. Поворотные сопла с управлением по двум каналалам обычно выполняются со сферической опорой, закреплённой в карданном подвесе. При такой схеме сопло может отклоняться в двух взаимноперпендикулярных плоскостях с помощью двух пар гидравлических приводов.
Рис. 12. Конструктивная схема поворотного сопла, отклоняемого в одной плоскости: 1 –закладной элемент конструкции соплового блока; 2 – гибкая металлическая перегородка сильфонного типа; 3 – элластичное уплотнение; 4 – теплозащитный входной вкладыш (воротник); 5 – вкладыш критического сечения сопла с вольфрамовым напылением; 6 – конструкция раструба сопла; 7 – силовой привод. Данная схема управления обладает следующими основными преимуществами: - минимальными потерями тяги;
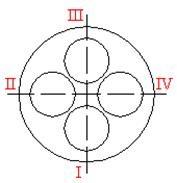
- вполне допустимыми значениями потребляемой мощности; - преемлемыми значениями управляющих усилий (до 15% и более от силы тяги); - стабильностью характеристик в различных условиях полёта. Ниже предлагаются значения управляющих усилий УБР с РДТТ: 1-я ступень – (12…15 2-я ступень –(5…10) 3-я ступень – (3…8) Следует отметить, что при использовании односопловых схем возможно управление вектором тяги только по каналам тангажа и рысканья. Для управления по крену обычно используют автономные управляющие двигатели или управляющие сопла. Применение четырёхсопловой конструкции двигателя с использованием принципа отклонения газовой струи позволяет управлять ступенью по всем плоскостям. Однако данная схема, которая была использована на первой ступени УБР «Минитмен-3», в дальнейшем не нашла широкого применения. Кроме рассмотренной выше схемы возможно применение управляющих сопел с разъёмом в сверхзвуковой части сопла, где число М потока равно
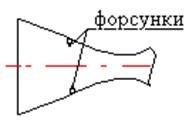
Рис. 13. Схема поворотного сопла с разъёмом в сверхзвуковой части: 1 – силовой привод; 2 – ось поворота раструба; 3 – отклоняемая часть раструба сопла; Основное достоинство данной схемы состоит в том, что управляющий момент возникает за счёт воздействия газодинамической струи, вытекающей из неподвижной части сопла на поворотную часть. При этом обеспечивается надёжность работы за счёт того, что линия разреза сопла находится в зоне сравнительно малых давлений. К недостаткам такой конструкции следует отнести большие позиционные моменты, возникающие при повороте раструба сопла. Кроме того, при такой схеме управления имеют место вполне ощутимые потери удельного импульса за счёт возникновения местных скачков уплотнения в потоке продуктов сгорания в месте разрыва контура (не зависимо от угла поворота). Рассмотрим ещё одну схему управления, использующую поворот истекающей струи газового потока. Это управление с помощью дефлекторов (рис. 14)
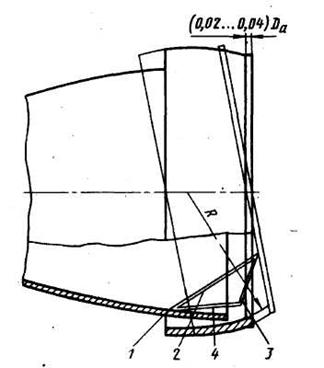
Рис. 14. Схема управления с помощью дефлектора: 1 – точка отрыва потока; 2 – косой скачок; 3 – скачок уплотнения; 4 – граница потенциального течения.
Преимуществом сферического дефлектора являются малые потери тяги и высокая стойкость, так как они взаимодействуют с потоком газов только при необходимости создания управляющей силы. К недостатку данного способа можно отнести сравнительно малые значения управляющих усилий. Поэтому дефлекторы обычно применяются на последних ступенях многоступенчатых баллистических твёрдотопливных ракет. Ниже предлагаются возможные способы создания управляющих сил и схемы органов управления различных систем, за исключением рассмотренных выше. При проведении массового анализа органов управления будем рассматривать поворотное сопло. Массу элементов органов управления будем считать равной сумме масс рулевых приводов с элементами крепления и бортовых источников питания:
где
Таблица 3
Будем также считать, что масса рулевых приводов пропорциональна массе соплового блока
амасса бортовых источников питания пропорциональна стартовой массе i -й ступени
где Нетрудно заметить, что сумарная масса органов управления, также как и все остальные, пропорциональна массе топливного заряда
|
||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-01-08; просмотров: 366; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.15.229.113 (0.008 с.) |
 от силы тяги;
от силы тяги; от силы тяги;
от силы тяги; 1,5…2,0 (рис.13).
1,5…2,0 (рис.13).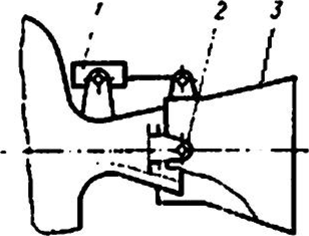
 =
=  +
+  , (31)
, (31)

 (0,33 …0,37)·
(0,33 …0,37)·  (32)
(32)
 = (0,0004…0,00045)·
= (0,0004…0,00045)·  ), (33)
), (33) ·
·  ). (34)
). (34) . А это означает, что она также пропорциональна кубу диаметра заряда.
. А это означает, что она также пропорциональна кубу диаметра заряда.


