Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Ходкостью называется способность судна развивать заданную скорость под действием приложенной к нему движущей силы при наименьшей затрате энергии.
При движении судна с постоянной скоростью v судно находится в состоянии равновесия, то есть силы, действующие на судно равны. Что же это за силы? Движение судна осуществляется за счет силы, создаваемой его движительным комплексом – упором Р. В противоположную сторону действует сила, препятствующая движению. Но судно можно представить, как некое тело, движущееся в набегающем потоке (Рисунок 65). При таком движении на корпусе судна появляется сила сопротивления, направленная под углом к направлению движения. Эту силу можно разложить на две составляющие: o сила, равная по величине упору и направленная в противоположную движению сторону – сила сопротивления окружающей среды R. o Для больших судов подъемная сила может быть незначительной. Но для небольших судов не учитывать ее невозможно. Естественно, что она увеличивается с увеличением скорости. Все знают, что корпус моторных лодок при быстром движении как бы выходит из воды. Мало того, существуют суда (глиссеры), которые используют подъемную силу для уменьшения сопротивления воды, а, следовательно, для увеличения скорости хода. Получается, что для того, чтобы обеспечить движение судна с заданной скоростью, нужно учесть силу сопротивления движению судна R, действие его движителя и, наконец, взаимодействие системы «корпус – двигатель – движитель». То есть основой расчета ходкости судна является определения величины сопротивления воды движению судна.
часть 1. СОПРОТИВЛЕНИЕ ВОДЫ ДВИЖЕНИЮ СУДНА
§ 43. Общее представление о сопротивлении воды движению судна Сила сопротивления включает в себя сопротивление воды и воздуха. Сопротивлением воздуха из-за его небольшой по сравнению с сопротивлением воды значением в практических расчетах можно пренебречь. Но в случае, когда судно движется с большой скоростью хода, а особенно, если судно имеет развитые надстройки, воздушное сопротивление необходимо учитывать, так как оно может составить 5-7 % всей силы сопротивления.
Сопротивлением воды движению судна называют равнодействующую гидродинамических давлений и касательных напряжений трения на направление движения. Что же такое – сопротивление воды? А это энергия, которую затрачивает движущееся в воде тело на приведение в движение масс воды. Сила сопротивления воды состоит из сопротивления давления и сопротивления трения. В свою очередь сопротивление давления можно разделить на две составляющие: сопротивление формы и волновое сопротивление. Полное сопротивление воды движению судна определяется, как сумма нескольких составляющих R = R тр + R ф + R в, (151) где R тр, R ф и R в – сопротивление трения, формы и волновое соответственно. Все три составляющие взаимно влияют друг на друга, но при вычислении эти влиянием пренебрегают. И определяют каждую составляющую отдельно. Сопротивление трения R тр определяется вязкостными свойствами воды. Частицы воды, находящиеся непосредственно у корпуса судна, движутся вместе с ним, приводя при этом в движение соседние слои воды, которые движутся уже медленнее, а те, в свою очередь – следующие, и так далее. На некотором расстоянии от корпуса частицы воды остаются в покое. Сопротивление трения зависит от скорости судна, величины его смоченной поверхности, от состояния этой поверхности – от шероховатости. Его можно определить о формуле
(152)
где k тр – коэффициент трения; ρ – массовая плотность воды в Ω – площадь смоченной поверхности судна в м²;
v – скорость судна в м/сек. Массовая плотность пресной воды равна 102 кг сек² м Есть множество формул, позволяющих приближенно определить площадь смоченной поверхности судна. В их основе лежит возможность рассчитать площадь смоченной поверхности судна при помощи главных размерений судна и коэффициентов полноты. Например, для большинства транспортных судов может быть использована формула Мумфорда
Ω = L (δ B + 1.7 T) (153) где L, B, T – главные размерения судна в м; δ – коэффициент общей полноты водоизмещения судна. Коэффициент трения k тр может быть определен, как коэффициент трения гладкой пластины, имеющей площадь смоченной поверхности, равную площади смоченной поверхности судна k т.п. (ее можно определить расчетом или по таблице), и надбавки на шероховатость k ш, учитывающей состояние поверхности корпуса,
k тр = k т.п. + k ш (154) Так как все величины, входящие в формулу (152) можно определить, то и сопротивление трения можно рассчитать для любого судна. Что касается сопротивления давления, то его рассчитать по формулам не представляется возможным, так как его величина зависит от формы корпуса судна. Прежде чем обратиться к методу расчета сопротивления давления, рассмотрим, что представляют собой его составляющие. Сопротивление формы R ф возникает вследствие влияния вязкости жидкости на распределение давлений по поверхности судна. По мере приближения от носа судна к корме давление воды уменьшается, а скорость движения частиц увеличивается, что приводит к образованию завихрений. Завихрения образуются также при обтекании выступов на шероховатой поверхности. На образование этих завихрений расходуется часть энергии. Величина этого сопротивления зависит от скорости хода судна и от формы его корпуса. Волновым сопротивлением R в называется составляющая, учитывающая энергию, которую расходует судно на образование так называемой носовой волны. При движении судна давление воды в оконечностях судна больше, чем в середине, поэтому в носу и в корме уровень воды повышается, а в середине – понижается, что приводит к образованию волн. Волновое сопротивление зависит от скорости хода судна, формы его корпуса и глубины и ширины фарватера. Характеристикой волнового сопротивления является число Фруда – безразмерный коэффициент, определяемый отношением скорости к длине судна:
(155)
Так как и сопротивление формы, и сопротивление волновое появляется в результате неравномерного распределения давления по корпусу судна, то их сумму и называют - сопротивление давления или остаточным сопротивлением. R ост = R ф + R в, (156) Остаточное сопротивление рассчитать довольно трудно, так как оно зависит от формы корпуса судна, скорости хода. Поэтому его определяют по результатам так называемых модельных испытаний.
§ 44. Определение сопротивления воды опытным путем
Модели изготавливают в таком масштабе, чтобы длина ее была в пределах 2 – 8 метров. Чем крупнее модель, тем точнее результаты испытаний. Модель должна быть подобна судну. Геометрическое подобие состоит в том, что все размеры судна и модели имеют одинаковое соотношение, то есть
(157)
где L, B, T, Ω, V – длина, ширина, осадка, площадь смоченной поверхности и водоизмещение судна, а l, b, t, ω, v – соответственно длина, ширина, осадка. Площадь смоченной поверхности и водоизмещение модели. Так как судно и модель должны быть подобны, то у них должны быть равные числа Фруда, которые определяются по формуле (155)
(158)
из выражения (158) можно вывести формулу для расчета скорости, которую должны задавать модели при буксировке, чтобы обеспечит подобие судна и модели. При буксировке модели с такой скоростью у модели возникает волнообразование, геометрически подобное волнообразованию натурного судна.
(159)
где v м – скорость модели в м/сек; v c – скорость судна в м/сек. Испытания проводят путем буксировки модели с записью величин, характеризующих движение модели, в первую очередь скорости хода и сопротивления воды. Затем пересчитывают сопротивление модели на натурное судно. Во время испытаний модели определяют ее полное сопротивление, которое фактически равно буксировочной тяге при постоянной скорости движения модели. Как и у натурного судна, полное сопротивление модели может быть разложено на составляющие: сопротивление трения модели и остаточное сопротивление модели: r = r тр + r о (160) Как и у судна, сопротивление трения модели может быть рассчитано по формуле
(161)
Коэффициент трения модели k тр м может быть определен по таблицам. Остаточное сопротивление модели будет равно r о = r - r тр
(162) Затем по рассчитанному остаточному сопротивлению модели рассчитывается остаточное сопротивление натурного судна, используя коэффициент подобия λ R о = r о λ³, (163) Тогда
R = R тр + R о Сопротивление трения определяется расчетом по формуле (152).
§ 45. Влияние условий плавания на сопротивление воды движению судов Посадка судна. Уменьшение осадки сказывается, в основном, на уменьшении сопротивления трения, так как снижается площадь смоченной поверхности. Но при уменьшении осадки также изменяется форма корпуса судна (становится более заостренной). Из-за этого скорость судна при плавании в балласте или порожнем всегда выше. При изменении дифферента судна сопротивление трения практически не меняется, зато волновое сопротивление уменьшается при дифференте на корму и увеличивается при дифференте на нос. При дифференте на корму из-за повышения полноты обводов увеличивается сопротивление формы. Поэтому для каждого судна величина наиболее приемлемого выгоднейшего дифферента может быть определена опытным путем. Ветер и волны. При волнении сопротивление судна значительно возрастает из-за воздействия волн на корпус судна и ветра на надводную часть судна. Наибольшему влиянию ветра и волнения подвержены небольшие суда. Мелководье и ширина фарватера. Суда внутреннего плавания эксплуатируются на мелководных участках рек и каналов. Ограниченная ширина и небольшая глубина каналов существенно влияют на сопротивление воды движению судна. Величина сопротивления воды зависит от глубины канала, как уже было представлено на рисунке 60. Это происходит потому, что при небольших глубинах из-за близости поверхности дна канала увеличивается сопротивление трения. При этом также возрастает перепад давления вдоль судна, возрастает сопротивление формы, но более всего – волновое сопротивление. При плавании на очень малых глубинах под корпусом судна наблюдается понижение давления, что приводит к увеличению осадки до 0,5 метров и более – просадке судна. Наиболее существенно изменяется волновое сопротивления в канале. Из-за небольшой ширины канала носовая волна, создаваемая судном, не расходится, а как бы движется перед носом судна. Это вызывает увеличение сопротивления воды, дополнительную просадку судна. К тому же волна способствует разрушению стенок канала. При прохождении каналов, критическая скорость определяется по глубине канала:
так как при скорости судна до (0,3 – 0,4) от критической картина волнообразования и сопротивления воды движению судна на мелководье меняется мало. Чтобы исключить удары о дно, предотвратить разрушение откосов, на судоходных каналах установлены предельные скорости судов, которые значительно ниже критических. Плавание судна во льдах. Для судов ледового класса необходимо учитывать значительное увеличение сопротивления при плавании в битом льду.
§ 46. Определение мощности главных механизмов К рассчитанному сопротивлению судна добавляется воздушное сопротивление и сопротивление выступающих частей. Правда, применяемые на одновальных судах старн-посты и рули не только снижают сопротивление воды, но и улучшают ходкость судна. Однако у многовальных судов даже правильно расположенные обтекаемые кронштейны гребных валов могут увеличивать сопротивление на 4-8 %. Все это увеличение сопротивления могут быть учтены введением некоего коэффициента (1+с). В результате полное сопротивление будет R п = (1+с) R (164) Найдя полное сопротивление воды движению судна, можно определить буксировочную мощность – мощность, используемая непосредственно на движение судна, в кВт будет определяться по формуле: N б = R n v, (165) где R n – полное сопротивление в килоньютонах; v – скорость в м/сек. Допускается традиционное выражение мощности в лошадиных силах:
(166)
Если R выражается в килограммах силы, то мощность в лошадиных силах будет
(167)
Фактически, мощность силовой установки должна быть больше буксировочной из-за неизбежных потерь в комплексе корпус – движитель – двигатель. Величина этих потерь учитывается коэффициентами. Тогда мощность, развиваемая главным двигателем, будет:
(168)
где η пр – пропульсивный коэффициент, учитывающий эффективность работы движителя и взаимодействие его с корпусом судна; η вр – коэффициент полезного действия валопровода с передачей (редуктором); η в = η прη вр – общий к.п.д. системы корпус – движитель – двигатель. Из формулы (168) можно определить скорость судна
(169)
Для приближенной, ориентировочной оценки необходимой мощности можно воспользоваться так называемой формулой адмиралтейских коэффициентов, которая является производной от формулы (168)
где D – весовое водоизмещение судна в т; v – скорость судна в узлах; С а – адмиралтейский коэффициент, который можно определить по судну-прототипу.
§ 47. Пути повышения скорости судов
Уменьшить сопротивление можно, подобрав соответствующую форму корпуса судна. Особое значение при этом имеет форма носовой и кормовой оконечности судна. Например, бульбообразный нос и транцевая корма значительно снижают волновое сопротивление, которое у быстроходных судов может достигать 50% всего сопротивления воды. Бульбообразный нос, к тому же, увеличивает водоизмещение судна без увеличения сопротивления, что очень важно для транспортных судов. Уменьшение сопротивления трения можно достичь хорошей обработкой поверхности корпуса, уменьшением выступающих частей и т.д. большое значение имеет борьба с обрастанием корпуса. Но все эти меры не могут привести к большому увеличению скорости судна. Единственный способ кардинально увеличить скорость судна – это вывести корпус судна из воды. На пластине, расположенной под углом α, называемым углом атаки, к набегающему потоку, возникает подъемная сила. Корпус движущегося со скоростью судна можно тоже рассматривать как тело в набегающем потоке. Практически на каждом судовом корпусе появляется подъемная сила, которая приподнимает судно над водой. Именно ее используют в полной мере суда, называемые глиссерами. Глиссеры имеют днище специальной формы (простейшее – плоское), на поверхности которого при движении возникает подъемная сила, которая выводит корпус из воды. Этим достигается резкое уменьшение сопротивления воды, и скорость судна увеличивается. Именно на глиссере был установлен рекорд скорости на воде. В 1964 году английский гонщик Дональд Кемпбел установил мировой рекорд – 444,6 км/час. Но глиссеры могут быть только небольшими судами, так как при больших размерах для глиссера требуется немыслимая мощность двигателя. Кроме того, глиссеры обладают плохой остойчивостью, неустойчивостью на курсе, даже при сравнительно небольшом волнении корпус глиссера сильно бьется о воду, что может привести к аварии. На глиссер устанавливают лёгкие двигатели внутреннего сгорания, газовые турбины. Движителями служат гребные (реже воздушные) винты, водомёты. Глиссер используются для перевозки пассажиров, охранной службы, спортивных гонок, прогулок.
Если под плоское днище судна нагнетать воздух под давлением, то корпус судна поднимется над водой, как бы опираясь на воздушный слой – так называемую «воздушную подушку», что тоже приведет к уменьшению сопротивления. Движение таких судов осуществляется либо путем направленного движения воздуха из под днища, либо при помощи специального двигателя с воздушным винтом. Судно на воздушной подушке (Рисунок 69) по сравнению с судами на подводных крыльях имеет одно важное преимущество: оно может двигаться не только над водой, но и надо льдами, снегом и достаточно ровной поверхностью суши. Суда на воздушной подушке используются в основном как быстроходные паромы со скоростями от 120 до 150 км/час.
При движении крыла вблизи поверхности возникает так называемый экранный эффект: если расстояние от крыла до поверхности земли не превышает 0,3-0,5 от ширины крыла, то подъемная сила, возникающая на крыле, раза в два превышает подъемную силу в воздухе. Это свойство летающих объектов было использовано при проектировании экранопланов – судов, которые при движении полностью отрываются от воды и летят близко над ее поверхностью (Рисунок 70). При этом они могут достигать скорости до 500 км/час, и в отличие от самолетов, затрачивают меньше энергии и могут достигать значительных размеров. Рисунок 70 Экраноплан
Кроме вышеперечисленных, есть еще ряд судов, которые достигают больших скоростей за счет снижения сопротивления воды. Это суда с воздушной каверной на днище, суда на динамической воздушной подушке и др.
часть 2. ДВИЖИТЕЛИ
§ 48. Судовые движители Судовой движитель – устройство для преобразования какой-либо энергии в полезную работу движения судна. Движитель, например паруса, могут использовать «внешнюю» энергию (то есть энергию течения воды, ветра) или же приводиться в действие мускульной энергией человека (весло, шест), судовыми двигателями. Движители бывают активными, использующими энергию ветра для движения, и реактивными, к которым относится большинство применяемых движителей.
Древняя идея перемещения судов путем отталкивания от грунта осуществляется на так называемых туерных судах, которые используются на участках рек с быстрым течением. Движение этих судов осуществляется перематыванием через барабан лебедки уложенного по дну реки троса или цепи. На быстроходных судах в качестве движителя применяются воздушные винты. Реактивные движители создают движущую силу за счет реакции масс воды или воздуха, отбрасываемых в сторону, противоположную направлению движения судна. К этим движителям относятся: · Гребные винты – наиболее распространенный тип движителя, который буде разбирать подробнее ниже. · Гребные колеса состоят из ступицы со спицами и обводам и нескольких лопастей – плиц. Гребные колеса располагают на валах по бортам судна. Современные гребные колеса имеют специальный механизм для поворота лопастей, что обеспечивает им вход в воду без удара и выход из брызг. К преимуществам гребных колес относится возможность применения их на судах с малой осадкой, а также способность их работать при небольших глубинах. · Крыльчатый движитель - судовой движитель с вертикальными подвижными лопастями, расположенными по окружности диска, установленного заподлицо с днищем судна. При вращении диска лопасти совершают по отношению к нему такие колебательные движения вокруг вертикальной оси, при которых каждая лопасть за время одного оборота диска создает силу, направленную в одну и ту же сторону. Крыльчатые движители используются на судах, требующих большой маневренности: буксирах, тральщиках, плавучих кранах, а также в качестве подруливающих устройств.
Рисунок 72 Крыльчатый движитель 1 – управляющий механизм, 2 – привод,, 3 – лопасти, 4 – распределительные рычаги
·. Водомётный движитель - судовой движитель, у которого сила, движущая судно, создается выталкиваемой из него струей воды. Он представляет собой профилированную трубу (водовод), в которой водяной поток ускоряется лопастным механизмом (гребной винт, крыльчатка насоса), энергией сгорания топлива или давлением сжатого газа и обеспечивается направленный выброс струи. Водоводы располагаются внутри или снаружи корпуса судна. Эффективность водометного движителя, зависящая от формы водоводов, месторасположения и конструкции водозаборников, обычно меньше, чем гребного винта. Преимущества водометного движителя — хорошая защищённость от механических повреждений и возможность избежать кавитации. Водометные движители применяются обычно на судах, плавающих на мелководье, или служат в качестве подруливающего устройства для улучшения поворотливости судов. Основная характеристика движителя — его движущая сила (упор), равная при прямолинейном равномерном движении силе сопротивления воды движению судна (у буксирного судна — сумме сопротивлений самого судна и буксируемого объекта). Эффективность движителя в сочетании с корпусом судна и рулём характеризуется отношением буксировочной мощности судна к мощности на движителе – так называемым пропульсивным коэффициентом. Выбор типа движителя зависит от назначения судна. Например, на судах, плавающих по мелководью или по засорённому фарватеру, применяются водомётные движители; на судах с повышенной манёвренностью — крыльчатые движители.
§ 49. Гребной винт
Если мысленно «развернуть» эти винтовые линии на плоскость, то получим треугольник, гипотенуза которого и является траекторией движения точки лопасти, а катеты – траектории соответственно поступательного и вращательного движения точки. Этот треугольник называется шаговым треугольником, а угол φ - шаговым углом.
Рисунок 74 Винт постоянного шага
Шагом называется расстояние, которое проходит любая точка на лопасти винта при поступательном движении за один оборот. На рисунке 74 показан винт постоянного шага, у которого все сечения лопасти за один оборот проходят одинаковое расстояние. Как видно из рисунка, это возможно только, если менять шаговый угол каждого сечения, так как путь, пройденный точкой при вращении, зависит от расстояния этой точки от оси вращения. Это обстоятельство и придает лопасти винта изогнутую форму. Представить сложную винтовую поверхность лопасти помогает рисунок. Лопасть при работе винта как бы скользит по направляющим угольникам, имеющим на каждом радиусе разную длину основания, но одинаковую высоту - шаг H, и поднимается за один оборот на величину Н. Произведение же шага на частоту вращения (Нn) представляет собой теоретическую скорость перемещения винта вдоль оси. Винты изготавливают из чугуна, углеродистой стали, легированной стали, латуни, бронзы и даже из пластмасс – для небольших судов. Гребные винты современных морских судов изготавливают главным образом из бронзы или латуни, т.к. эти материалы стойки против коррозии, долго сохраняют чистоту поверхности лопастей, хорошо поддаются шлифовке и полировке. Гребные винты для ледоколов делают из нержавеющей легированной стали. Гребной винт преобразует вращение вала двигателя в упор – силу, толкающую судно вперед. При вращении на поверхностях лопастей, обращенных вперед, в сторону движения судна (засасывающих), создается пониженное давление, а на обращенных назад (нагнетающих) – повышенное давление воды. В результате разности давлений на лопастях возникает сила Y (ее называют подъемной). Разложив силу на составляющие - одну, направленную в сторону движения судна, а вторую перпендикулярно к нему, получим силу Р, создающую упор гребного винта, и силу Т, образующую крутящий момент, который преодолевается двигателем.
§ 50. Основные геометрические и кинематические характеристики винта Основными геометрическими характеристиками винта являются: · диаметр винта D – диаметр окружности, описываемой наиболее удаленными от оси точками лопастей; · диаметр ступицы винта d; · шаг винта Н – шаг винтовой поверхности или расстояние, которое пошел бы винт за один оборот в твердой среде; · шаговое отношение Н/ D – отношение шага винта к его диаметру. Величина шагового отношения судовых винтов колеблется от 0,6 до 2,0; · дисковое отношение А/А d – отношение суммарной площади всех лопастей винта А к площади диска винта. В качестве характеристики винта принимается рабочая, или спрямленная, площадь лопастей. При ее вычислении принимается ширина лопасти, замеренная на нагнетающей поверхности. В характеристике винта указывается обычно не сама спрямленная площадь лопастей А, а ее отношение к площади А d сплошного диска такого же, как винт, диаметра,
Величина дискового отношения судовых гребных винтов колеблется от 0,3 до 1,2 (большие значения соответствуют быстроходным судам). Для пояснения принципа действия гребного винта рассмотрим на рисунке 75 сечение лопасти, сделанное на расстоянии r от оси винта Упор в большой степени зависит от угла атаки a профиля лопасти. Если a больше оптимальной величины, то мощность двигателя непроизводительно затрачивается на преодоление большого крутящего момента, если же угол атаки мал, подъемная сила и, следовательно, упор Р будут невелики, мощность двигателя окажется недоиспользованной.
На рисунке 75 показаны силы и скорости, действующие в каком-то одном определенном поперечном сечении лопасти, расположенном на каком-то определенном радиусе r гребного винта. Окружная скорость вращения v, зависит от радиуса, на котором сечение расположено v r = 2 p r n где n - частота вращения винта, об/с, Cкорость же поступательного движения винта v р остается постоянной для любого сечения лопасти. Таким образом, чем больше r, т.е. чем ближе расположен рассматриваемый участок к концу лопасти, тем больше окружная скорость v r, а, следовательно, и суммарная скорость w.
(170) где v р – осевая скорость винта, м/сек, п – число оборотов винта в секунду.
(171) Разность между шагом винта и абсолютной поступью винта называется абсолютным скольжением, и обуславливает работу по пасти винта под углом атаки a к потоку воды, имеющему скорость w.
(172) Отношение абсолютного скольжения к шагу винта называется относительным скольжением гребного винта s:
(173)
Скольжение и поступь являю
|
|||||||||
|
|
Последнее изменение этой страницы: 2020-11-23; просмотров: 283; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.118.1.158 (0.133 с.) |

 сила, направленная перпендикулярно движению – подъемная сила F
сила, направленная перпендикулярно движению – подъемная сила F
 Величина силы сопротивления воды движению судна зависит от его размеров и формы корпуса судна, скорости хода судна, глубины фарватера и др. судить о силе сопротивления воды движению судна можно по графикам зависимости сопротивления от скорости хода. Как видно из рисунка 66, с увеличением глубины фарватера сила сопротивления воды движению судна для одной и той же скорости уменьшается. И еще, характер зависимости между сопротивлением воды и скоростью таков, что при определенных скоростях небольшое увеличение скорости хода судна требует значительного увеличения затрат на преодоление сопротивления воды движению судна, а это экономически не выгодно. Это обстоятельство и не позволяет судам двигаться с большой скоростью.
Величина силы сопротивления воды движению судна зависит от его размеров и формы корпуса судна, скорости хода судна, глубины фарватера и др. судить о силе сопротивления воды движению судна можно по графикам зависимости сопротивления от скорости хода. Как видно из рисунка 66, с увеличением глубины фарватера сила сопротивления воды движению судна для одной и той же скорости уменьшается. И еще, характер зависимости между сопротивлением воды и скоростью таков, что при определенных скоростях небольшое увеличение скорости хода судна требует значительного увеличения затрат на преодоление сопротивления воды движению судна, а это экономически не выгодно. Это обстоятельство и не позволяет судам двигаться с большой скоростью.
 ;
; , плотность соленой воды – 104 кг сек² м
, плотность соленой воды – 104 кг сек² м 

 Остаточное сопротивление судна можно определить с достаточной степенью точности только опытным путем. Для этой цели проводят испытания моделей судна в так называемых опытовых бассейнах, предназначенных для буксировки моделей (Рисунок 67). Суть проведения модельных испытаний заключается в том, что модель буксируют в бассейне с определенной скоростью, определяют сопротивление воды, а оно в этом случае будет равно силе тяги при буксировке, которую легко можно определить. Затем производят пересчет на натуральное судно.
Остаточное сопротивление судна можно определить с достаточной степенью точности только опытным путем. Для этой цели проводят испытания моделей судна в так называемых опытовых бассейнах, предназначенных для буксировки моделей (Рисунок 67). Суть проведения модельных испытаний заключается в том, что модель буксируют в бассейне с определенной скоростью, определяют сопротивление воды, а оно в этом случае будет равно силе тяги при буксировке, которую легко можно определить. Затем производят пересчет на натуральное судно.
 ,
,  ,
,


 Скорость хода является одним из важнейших эксплуатационных качеств, поэтому понятно стремление судостроителей придавать судну как можно большую скорость хода. Существует такое понятие у проектировщиков судов – критическая скорость. Это значение скорости хода судна, после которой даже небольшое увеличение скорости судна требует очень значительного увеличения мощности двигателя, что неприемлемо. Наиболее экономичный способ увеличения скорости – уменьшение сопротивления воды, что позволяет при той же мощности двигателя получить большую скорость.
Скорость хода является одним из важнейших эксплуатационных качеств, поэтому понятно стремление судостроителей придавать судну как можно большую скорость хода. Существует такое понятие у проектировщиков судов – критическая скорость. Это значение скорости хода судна, после которой даже небольшое увеличение скорости судна требует очень значительного увеличения мощности двигателя, что неприемлемо. Наиболее экономичный способ увеличения скорости – уменьшение сопротивления воды, что позволяет при той же мощности двигателя получить большую скорость.
 Проблему увеличения размеров судов, имеющих возможность двигаться со сравнительно большой скоростью, частично решают суда на подводных крыльях (Рисунок 68). Правда, и эти суда, несмотря на то, что они могут быть значительно крупнее глиссеров, ограничены в размерах из-за отсутствия легких и мощных двигателей. Эти суда выходят из воды не за счет подъемной силы, появляющейся на корпусе судна, а за счет подъемной силы специальных погруженных крыльев, которые крепятся на стойках под днищем судна. При развитии судном определенной скорости подъемная сила на крыльях становится равной весу судна, и корпус судна поднимается над водой. Естественно, сопротивление воды резко уменьшается, и судно развивает большую скорость.
Проблему увеличения размеров судов, имеющих возможность двигаться со сравнительно большой скоростью, частично решают суда на подводных крыльях (Рисунок 68). Правда, и эти суда, несмотря на то, что они могут быть значительно крупнее глиссеров, ограничены в размерах из-за отсутствия легких и мощных двигателей. Эти суда выходят из воды не за счет подъемной силы, появляющейся на корпусе судна, а за счет подъемной силы специальных погруженных крыльев, которые крепятся на стойках под днищем судна. При развитии судном определенной скорости подъемная сила на крыльях становится равной весу судна, и корпус судна поднимается над водой. Естественно, сопротивление воды резко уменьшается, и судно развивает большую скорость.
 Но и суда на подводных крыльях имеют ограничение скорости. Дело в том, что при увеличении скорости крылья могут разрушаться из-за кавитационной эрозии. (О кавитации – явлении холодного кипения воды – более подробно описано в разделе «Движители» в § 53)
Но и суда на подводных крыльях имеют ограничение скорости. Дело в том, что при увеличении скорости крылья могут разрушаться из-за кавитационной эрозии. (О кавитации – явлении холодного кипения воды – более подробно описано в разделе «Движители» в § 53)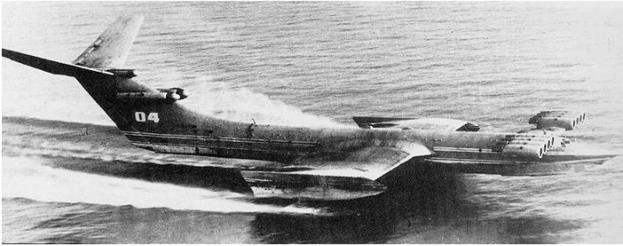

 Паруса – движители, не имевшие альтернативы в прежние времена, при всей массе недостатков имели одно очень важное преимущество: для обеспечения хода судна они использовали природную энергию – энергию ветра. Более дешевого способа получения энергии нет. К тому же парусники – экологически чистый вид транспорта. Это обстоятельство не позволяет отнести паруса к историческим движителям. Время от времени появляются современные суда, в той или иной форме использующие силу ветра. Например, спущенное на воду в 1980 году японское судно «Шин Айтоку Мару» (Рисунок 71) – первый танкер, оснащенный двигателями и парусами с компьютерным управлением.
Паруса – движители, не имевшие альтернативы в прежние времена, при всей массе недостатков имели одно очень важное преимущество: для обеспечения хода судна они использовали природную энергию – энергию ветра. Более дешевого способа получения энергии нет. К тому же парусники – экологически чистый вид транспорта. Это обстоятельство не позволяет отнести паруса к историческим движителям. Время от времени появляются современные суда, в той или иной форме использующие силу ветра. Например, спущенное на воду в 1980 году японское судно «Шин Айтоку Мару» (Рисунок 71) – первый танкер, оснащенный двигателями и парусами с компьютерным управлением.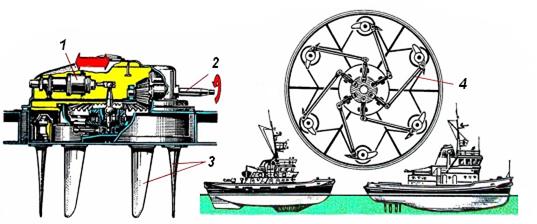

 На современных судах в основном работают гребные винты, которые отличаются небольшим весом, надежностью в эксплуатации. Винты обладают довольно высоким к.п.д. при сравнительно простой конструкции. Он состоит из нескольких лопастей, радиально укрепленных на ступице. Гребной винт, как и любой другой винт, преобразует вращательное движение, вырабатываемое судовым двигателем, в поступательное движение судна. Каждая точка его лопастей описывает винтовые линии (Рисунок 73)
На современных судах в основном работают гребные винты, которые отличаются небольшим весом, надежностью в эксплуатации. Винты обладают довольно высоким к.п.д. при сравнительно простой конструкции. Он состоит из нескольких лопастей, радиально укрепленных на ступице. Гребной винт, как и любой другой винт, преобразует вращательное движение, вырабатываемое судовым двигателем, в поступательное движение судна. Каждая точка его лопастей описывает винтовые линии (Рисунок 73)

 На схеме, иллюстрирующей характер взаимодействия лопасти и воды, a можно представить как угол между направлением вектора скорости набегающего на лопасть потока w и нагнетающей поверхностью. Вектор скорости потока w образован геометрическим сложением векторов скорости поступательного перемещения v р винта вместе с судном и скорости вращения v r, т.е. скорости перемещения лопасти в плоскости, перпендикулярной оси винта.
На схеме, иллюстрирующей характер взаимодействия лопасти и воды, a можно представить как угол между направлением вектора скорости набегающего на лопасть потока w и нагнетающей поверхностью. Вектор скорости потока w образован геометрическим сложением векторов скорости поступательного перемещения v р винта вместе с судном и скорости вращения v r, т.е. скорости перемещения лопасти в плоскости, перпендикулярной оси винта. Если бы винт работал в твердой среде, то за один оборот он проходил бы расстояние, равное шагу винта Н. в действительности же винт, работающий в податливой среде, какой является вода, проходит за один оборот расстояние меньшее, чем шаг. Это расстояние называется абсолютной поступью винта h.
Если бы винт работал в твердой среде, то за один оборот он проходил бы расстояние, равное шагу винта Н. в действительности же винт, работающий в податливой среде, какой является вода, проходит за один оборот расстояние меньшее, чем шаг. Это расстояние называется абсолютной поступью винта h. ,
,  Отношение абсолютной поступи винта к диаметру винта называется относительной поступью винта λ
Отношение абсолютной поступи винта к диаметру винта называется относительной поступью винта λ