Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Построчный алгоритм заполнения с затравкой
Затравка (x, y) выдаёт затравочный пиксел Pop -процедура, которая извлекает пиксел из стека Push - процедура, которая помещает пиксел в стек инициируем стек Push Затравка (x, y) While (стек не пуст) Извлекаем пиксел из стека и присваиваем ему новое значение Pop Пиксел (x, y) Пиксел (x, y) = Нов_значение сохраняем x- координату затравочного пиксела Врем_х = x заполняем интервал справа от затравки x = x +1 while Пиксел (x, y) ¹ Гран_значение Пиксел (x, y) = Нов_значение x = x +1 End while сохраняем крайний справа пиксел Xправ = x -1 восстанавливаем x- координату затравки x = Врем_х заполняем интервал слева от затравки x = x -1 while Пиксел (x, y) ¹ Гран_значение Пиксел (x, y) = Нов_значение x = x -1 End while сохраняем крайний слева пиксел Xлев = x +1 восстанавливаем x- координату затравки x = Врем_х проверим, что строка выше не является ни границей многоугольника, ни уже полностью заполненной; если это не так, то найти затравку, начиная с левого края подинтервала сканирующей строки x = Xлев y = y +1 while x £ Xправ ищем затравку на строке выше Флаг = 0 while (Пиксел (x, y) ¹ Гран_значение and Пиксел (x, y) ¹ Нов_значение and x < Xправ) if Флаг = 0 then Флаг = 1 x = x + 1 End while помещаем в стек крайний справа пиксел if Флаг =1 then if (x = Xправ and Пиксел (x, y) ¹ Гран_значение and Пиксел (x, y) ¹ Нов_значение) then Push Пиксел (x, y) Else Push Пиксел (x - 1, y) End if Флаг = 0 End if продолжим проверку, если интервал был прерван Xвход = x while ((Пиксел (x, y) = Гран_значение or Пиксел (x, y) = Нов_значение) and x < Xправ) x = x + 1 End while удостоверимся что координата пиксела увеличена if x = Xвход then x = x + 1 End while проверим, что строка ниже не является ни границей многоугольника, ни уже полностью заполненной Эта часть алгоритма совершенно аналогична проверке для строки выше, за исключением, того что вместо y = y + 1 надо подставить y = y - 1 endwhile Finish Удаление невидимых линий и поверхностей Задача удаления невидимых линий и поверхностей является одной из наиболее сложных в машинной графике. Алгоритмы удаления невидимых линий и поверхностей служат для определения линий ребер, поверхностей или объемов, которые видимы или невидимы для наблюдателя, находящегося в заданной точке пространства.
3.1 Необходимость удаления невидимых линий
Необходимость удаления невидимых линий, ребер, поверхностей или объемов проиллюстрирована рис.3.1. На рис.3.1, а приведен типичный каркасный чертеж куба. Его можно интерпретировать двояко: как вид куба сверху, слева или снизу, справа. Удаление тех линий или поверхностей, которые невидимы с соответствующей точки зрения, позволяют избавиться от неоднозначности. Результаты показаны на рис.3.1, b и c. Сложность задачи удаления невидимых линий и поверхностей привела к появлению большого числа, различных способов ее решения. Многие из них ориентированы на специализированные приложения. Наилучшего решения общей задачи удаления невидимых линий и поверхностей не существует. Для моделирования процессов в реальном времени, например, для авиа тренажеров, требуются быстрые алгоритмы, которые могут порождать результаты с частотой видео генерации (30 кадр/с). Для машинной мультипликации требуются алгоритмы, которые могут генерировать сложные реалистические изображения, в которых представлены тени, прозрачность и фактура, учитывающие эффекты отражения и преломления цвета в мельчайших оттенках. Подобные алгоритмы работают медленно, и зачастую на вычисления требуется несколько минут или даже часов. Строго говоря, учет эффектов прозрачности, фактуры, отражения и т. п. не входит в задачу удаления невидимых линий или поверхностей. Естественнее считать их частью процесса визуализации изображения. Процесс визуализации является интерпретацией или представлением изображения или сцены в реалистической манере. Однако многие из этих эффектов встроены в алгоритмы удаления невидимых поверхностей и поэтому будут затронуты. Существует тесная взаимосвязь между скоростью работы алгоритма и детальностью его результата. Ни один из алгоритмов не может достигнуть хороших оценок для этих двух показателей одновременно. По мере создания все более быстрых алгоритмов можно строить все более детальные изображения. Реальные задачи, однако, всегда будут требовать учета еще большего количества деталей. Алгоритмы удаления невидимых линий или поверхностей можно классифицировать по способу выбора системы координат или пространства, в котором они работают. Алгоритмы, работающие в объектном пространстве, имеют дело с физической системой координат, в которой описаны эти объекты. При этом получаются весьма точные результаты, ограниченные, вообще говоря, лишь точностью вычислений. Полученные изображения можно свободно увеличивать во много раз. Алгоритмы, работающие в объектном пространстве, особенно полезны в тех приложениях, где необходима высокая точность. Алгоритмы же, работающие в пространстве изображения, имеют дело с системой координат того экрана, на котором объекты визуализируются. При этом точность вычислений ограничена разрешающей способностью экрана. Результаты, полученные в пространстве изображения, а затем увеличенные во много раз, не будут соответствовать исходной сцене. Алгоритмы, формирующие список приоритетов работают попеременно в обеих упомянутых системах координат.
Объем вычислений для любого алгоритма, работающего в объектном пространстве, и сравнивающего каждый объект сцены со всеми остальными объектами этой сцены, растет теоретически как квадрат числа объектов (n2 ). Аналогично, объем вычислений любого алгоритма, работающего в пространстве изображения и сравнивающего каждый объект сцены с позициями всех пикселов в системе координат экрана, растет теоретически, как nN. Здесь nобозначает количество объектов (тел, плоскостей или ребер) в сцене, а N - число пикселов. Теоретически трудоемкость алгоритмов, работаюoих в объектном пространстве, меньше трудоемкости алгоритмов, работающих в пространстве изображения, при n < N. Поскольку N обычно равно (512)2, то теоретически большинство алгоритмов следует реализовывать в объектном пространстве. Однако на практике это не так. Дело в том, что алгоритмы, работающие в пространстве изображения, более эффективны потому, что для них легче воспользоваться преимуществом когерентности при растровой реализации. Далее дается изложение некоторых алгоритмов, работающих как в объектном пространстве, так и в пространстве изображения. Каждый из них иллюстрирует одну или несколько основополагающих идей теории алгоритмов удаления невидимых линий и поверхностей. Алгоритм плавающего горизонта Алгоритм плавающего горизонта чаще всего используется для удаления невидимых линий трехмерного представления функций, описывающих поверхность в виде F (x, у, z) = 0 Подобные функции возникают во многих приложениях в математике, технике, естественных науках и других дисциплинах. Существует много алгоритмов, использующих этот подход. Поскольку в приложениях в основном нас интересует описание поверхности, этот алгоритм обычно работает в пространстве изображения. Главная идея данного метода заключается в сведении трехмерной задачи к двумерной путем пересечения исходной поверхности последовательностью параллельных секущих плоскостей, имеющих постоянные значения координат x, y или z.
Секущие плоскости с постоянной координатой
На рис. 3.2 приведен пример, где указанные параллельные плоскости определяются постоянными значениями z. Функция F (x, у, z) = 0 сводится к последовательности кривых, лежащих в каждой из этих параллельных плоскостей, например к последовательности
y = f (x, z) или y = g (y, z) где z постоянно на каждой из заданных параллельных плоскостей. Итак, поверхность теперь складывается из последовательности кривых, лежащих в каждой из этих плоскостей, как показано на рис. 3.3. Здесь предполагается, что полученные кривые являются однозначными функциями независимых переменных. Если спроецировать полученные кривые на плоскость z = 0, то сразу становится ясна идея алгоритма удаления невидимых участков исходной поверхности. Алгоритм сначала упорядочивает плоскости z = const по возрастанию расстояния до них от точки наблюдения. Затем для каждой плоскости, начиная с ближайшей к точке наблюдения, строится кривая, лежащая на ней. Алгоритм удаления невидимой линии заключается в следующем:
Если на текущей плоскости при некотором заданном значении x соответствующее значение y на кривой больше значения y для всех предыдущих кривых при этом значении x, то текущая кривая видима в этой точке; в противном случае она невидима.
Реализация данного алгоритма достаточно проста.
3.4 Обработка нижней стороны поверхности
Для хранения максимальных значений y при каждом значении x используется массив, длина которого равна числу различимых точек (разрешению) по оси x в пространстве изображения. Значения, хранящиеся в этом массиве, представляют собой текущие значения “горизонта”. Поэтому по мере рисования каждой очередной кривой этот горизонт “всплывает”. Фактически этот алгоритм удаления невидимых линий работает каждый раз с одной линией. Алгоритм работает очень хорошо до тех пор, пока какая-нибудь очередная кривая не окажется ниже самой первой из кривых. Как показано на рис.3.4,а. Подобные кривые, естественно, видимы и представляют собой нижнюю сторону исходной поверхности. Однако алгоритм будет считать их невидимыми. Нижняя сторона поверхности делается видимой, если модифицировать этот алгоритм, включив в него нижний горизонт, который опускается вниз по ходу работы алгоритма. Это реализуется при помощи второго массива, длина которого равна числу различимых точек по оси x в пространстве изображения. Этот массив содержит наименьшие значения y для каждого значения x. Алгоритм теперь становится таким:
Если на текущей плоскости при некотором заданном значении x соответствующее значение y на кривой больше максимума или меньше минимума по y для всех предыдущих кривых при этом x, то текущая кривая видима. В противном случае она невидима.
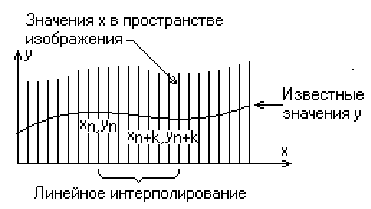
Полученный результат показан на рис. 3.4, b. В изложенном алгоритме предполагается, что значение функции, т. е. y, известно для каждого значения x в пространстве изображения. Однако если для каждого значения x нельзя указать (вычислить) соответствующее ему значение у, то невозможно поддерживать массивы верхнего и нижнего плавающих горизонтов. В таком случае используется линейная интерполяция значений у между известными значениями для того, чтобы заполнить массивы верхнего и нижнего плавающих горизонтов, как показано на рис. 3.5.
3.5 Линейная интерполяция между заданными точками
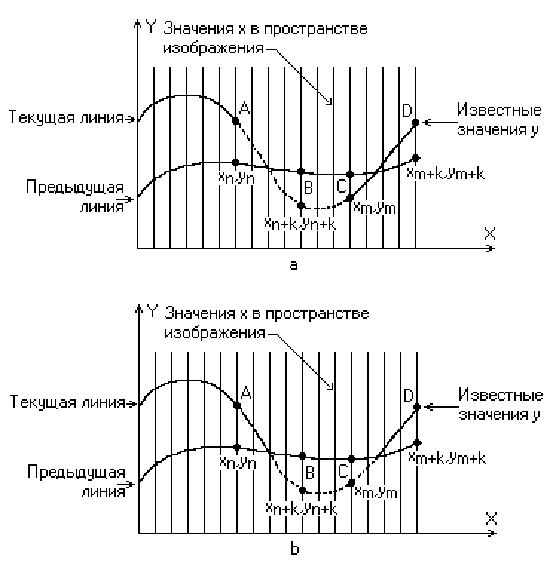
3.6. Эффект пересекающихся кривых
Если видимость кривой меняется, то метод с такой простой интерполяцией не даст корректного результата. Этот эффект проиллюстрирован рис. 3.6,а. Предполагая, что операция по заполнению массивов проводится после проверки видимости, получаем, что при переходе текущей кривой от видимого к невидимому состоянию (сегмент АВ на рис. 3.6,а), точка (xn+k, yn+k )объявляется невидимой. Тогда участок кривой между точками (xn, yn) и (xn+k, yn+k ) не изображается и операция по заполнению массивов не производится. Образуется зазор между текущей и предыдущей кривыми Если на участке текущей кривой происходит переход от невидимого состояния к видимому (сегмент CDна рис. 3.6,а), то точка (xm+k, ym+k ) объявляется видимой, а участок кривой между точками (xm, ym)и (xm+k, ym+k ) изображается и операция по заполнению массивов проводится. Поэтому изображается и невидимый кусок сегмента CD. Кроме того, массивы плавающих горизонтов не будут содержать точных значений у. А это может повлечь за собой дополнительные нежелательные эффекты для последующих кривы. Следовательно, необходимо решать задачу о поиске точек пересечения сегментов текущей и предшествующей кривых. Существует несколько методов получения точек пересечения кривых. На растровых дисплеях значение координаты x можно увеличивать на 1, начиная с xn или xm (рис. 3.6,а). Значение у, соответствующее текущему значению координаты х в пространстве изображения, получается путем добавления к значению у, соответствующему предыдущему значению координаты x, вертикального приращения Dy вдоль заданной кривой. Затем определяется видимость новой точки с координатами (x + 1, y + Dy). Если эта точка видима, то активируется связанный с ней пиксел. Если невидима, то пиксел не активируется, а x увеличивается на 1. Этот процесс продолжается до тех пор, пока не встретится xn+k или xm+k. Пересечения для растровых дисплеев определяются изложенным методом с достаточной точностью. Близкий и даже более элегантный метод определения пересечений основан на двоичном поиске. Точное значение точки пересечения двух прямолинейных отрезков, которые интерполируют текущую и предшествующую кривые, между точками (xn, yn) и (xn+k, yn+k ) (рис. 3.6) задается формулами:
где
а индексы cи p соответствуют текущей и предшествующей кривым. Полученный результат показан на рис. 3.6,b. Теперь алгоритм излагается более формально.
Если на текущей плоскости при некотором заданном значении x соответствующее значение y на кривой больше максимума или меньше минимума по y для всех предыдущих кривых при этом x, то текущая кривая видима. В противном случае она невидима.
Если на участке от предыдущего (xn) до текущего (xn+k) значения x видимость кривой изменяется, то вычисляется точка пересечения (xi).
Если на участке от xn до xn+k сегмент кривой полностью видим, то он изображается целиком; если он стал невидимым, то изображается фрагмент от xn до xi; если же он стал видимым, то изображается фрагмент от xi до xn+k.
Заполнить массивы верхнего и нижнего плавающих горизонтов.
Изложенный алгоритм приводит к некоторым дефектам, когда кривая, лежащая в одной из более удаленных от точки наблюдения плоскостей, появляется слева или справа из-под множества кривых, лежащих в плоскостях, которые ближе к указанной точке наблюдения. Этот эффект продемонстрирован на рис. 3.7, где уже обработанные плоскости n - 1 и n расположены ближе к точке наблюдения. На рисунке показано, что получается при обработке плоскости n + 1. После обработки кривых n - 1 и n верхний горизонт для значений x = 0 и 1 равен начальному значению у; для значений x от 2 до 17 он равен ординатам кривой n; а для значений 18, 19, 20 - ординатам кривой n - 1. Нижний горизонт для значений x = 0 и 1 равен начальному значению у; для значений x = 2, 3, 4 – ординатам кривой n; а для значений x от 5 до 20 - ординатам кривой n - 1. При обработке текущей кривой (n + 1) алгоритм объявляет ее видимой при x = 4. Это показано сплошной линией на рис. 3.7.
3.7 Эффект зазубренного ребра
Аналогичный эффект возникает и справа при x = 18. Такой эффект приводит к появлению зазубренных боковых ребер. Проблема с зазубренностью боковых ребер решается включением в массивы верхнего и нижнего горизонтов ординат, соответствующих штриховым линиям на рис. 3.7. Это можно выполнить эффективно, создав ложные боковые ребра. Приведем алгоритм, реализующий эту идею для обеих ребер.
Обработка левого бокового ребра: Если Pnявляется первой точкой на первой кривой, то запомним Pn в качестве Pn-1 и закончим заполнение. В противном случае создадим ребро, соединяющее Pn и Pn-1. Занесем в массивы верхнего и нижнего горизонтов ординаты этого ребра и запомним Pn в качестве Pn-1.
Обработка правого бокового ребра: Если Pn является последней точкой на первой кривой, то запомним Pn в качестве Pn-1 и закончим заполнение. В противном случае создадим ребро, соединяющее Pn и Pn-1. Занесем в массивы верхнего и нижнего горизонтов ординаты этого ребра и запомним Pn в качестве Pn-1.
Теперь полный алгоритм выглядит так:
Для каждой плоскости z = const. Обработать левое боковое ребро. Для каждой точки, лежащей на кривой из текущей плоскости: Если при некотором заданном значении x соответствующее значение у на кривой больше максимума или меньше минимума по у для всех предыдущих кривых при этом x, то кривая видима (в этой точке). В противном случае она невидима.
Если на сегменте от предыдущего (xn) до текущего (xn+k) значения x видимость кривой изменяется, то вычисляется пересечение (xi).
Если на участке от xn до (xn+k) сегмент кривой полностью видим, то он изображается целиком; если он cтал невидимым, то изображается его кусок от xn до xi; если же он стал видимым, то изображается его кусок от xi до xn+k.
Заполнить массивы верхнего и нижнего плавающих горизонтов. Обработать правое боковое ребро.
Если функция содержит очень острые участки (пики), то приведенный алгоритм может дать некорректные результаты. Во избежании этого если встречаются узкие участки, то функцию следует вычислять в большем числе точек.
3.8 Функция y = (1/5) sin x cos z - (3/2) cos (7a/4) * exp (-a), a = (x - p)2 + (z - p)2, изображённая в интервале (0, 2p) с помощью алгоритма плавающего горизонта
На рис. 3.8 показан типичный результат работы алгоритма плавающего горизонта. Запись этого алгоритма приводиться ниже.
|
|||||||||
|
|
Последнее изменение этой страницы: 2020-03-26; просмотров: 288; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.117.182.179 (0.058 с.) |