Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
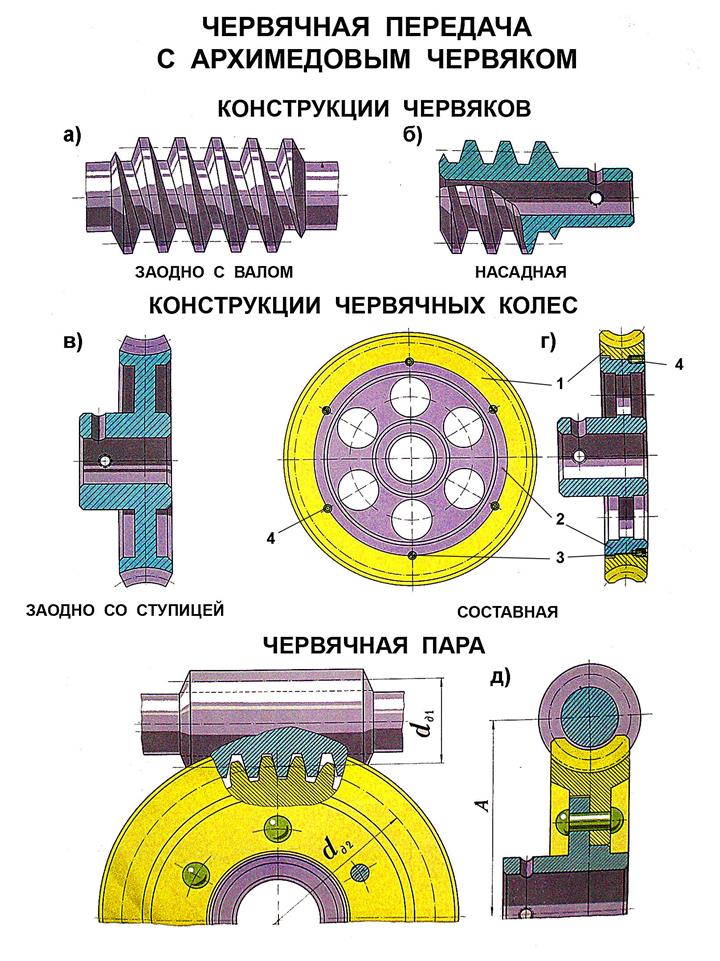
Червячная передача с Архимедовым червяком
Плакат содержит разновидности конструкций червяков и червячных колес, а также изображение червячной пары. На фиг. а представлена конструкция червяка, выполненного заодно с валом, которая применяется в случаях, когда диаметр окружности впадин червяка незначительно отличается от диаметра вала червяка. Если диаметр окружности впадин червяка значительно больше диаметра вала, то в этом случае применяют насадную конструкцию червяка, представленную на фиг. б. Здесь резьбовое отверстие справа от нарезной части выполнено для установочного винта, которым производят предварительную фиксацию насадного червяка на валу; после чего пользуясь гладким отверстием как кондуктором, сверлят вал с червяком, а затем развертывают отверстие разверткой и закрепляют червяк на валу штифтом (коническим или цилиндрическим). На фиг. в представлена конструкция червячного колеса, в которой зубчатый обод выполнен заодно со ступицей. Такая конструкция применяется при небольших колесах и при выполнении червячных колес из дешевых и недефицитных материалов (например из чугуна). В случае выполнения зубчатого обода червячного колеса из дорогих и дефицитных материалов, например из оловянно-фосфористой бронзы, применяют сборную конструкцию, представленную на фиг. г. Здесь крепление зубчатого обода 1 к ступице 2 осуществляется винтами 3, воспринимающими действие осевой составляющей нормальной силы, возникающей в зацеплении и (через один винт) круглыми шпонками 4, воспринимающими силы возникающие от крутящего момента. Фиксация и крепление ступицы червячного колеса на валу осуществляется также как и насадочного червяка – фиг. б. На фиг. д представлена червячная пара, где червяк и ступица колеса, выполнены из стали, а обод червячного колеса из бронзы. Крепление обода червячного колеса со ступицей здесь выполнено обычными стальными заклепками с полукруглой головкой.
К О Н Т Р О Л Ь Н Ы Е В О П Р О С Ы 1. В каких случаях применяются червячные передачи? 2. Дайте сравнительную характеристику червячных передач. 3.Какие дополнительные требования предъявляются к червячной передаче (по сравнению с цилиндрической?
4. Что такое g и в каких пределах применяется? 5. Как определить составляющие нормальной силы, возникающей в зацеплении червячной передаче с Архимедовым червяком? 6. Как определяется коэффициент полезного действия червячной передачи? 7. Как рассчитываются червячные передачи? 8. В чем заключается тепловой расчет червячных редукторов? 9. Какая передача называется необратимой (самотормозящейся) и в чем заключается условие самоторможения? 10. Из каких материалов изготавливаются червяки и червячные колеса? 11. Как определить мертвый ход червячной передачи?
126
127 ТИПЫ ВИНТОВЫХ МЕХАНИЗМОВ На плакате показаны различные схемы винтовых механизмов, конструктивные решения по устранению мертвого хода и приведены примеры конструкции приборных узлов с применением винтовых механизмов. Винтовые механизмы используются в приборах для преобразования вращательных движений в прямолинейно- возвратно поступательное, когда требуется плавное перемещение рабочего звена с высокой степенью точности. Основными звеньями винтовых механизмов являются винт и гайка. Для винтовой пары применяют резьбы: метрическую, трапецевидную и шариковую пару. Винты с метрической резьбой применяют в узлах приборов в отсчетных устройствах, где нагрузка на винт невелика, трение между винтом и гайкой не имеет существенного значения и винтовым механизмом не очень часто пользуются. К отсчетным метрическим винтам предъявляются повышенные требования в отношении точности шага, профиля резьбы и износостойкости. Винты с трапецевидной резьбой применяют в приборах, в счетно-решающих устройствах, в коноидных функциональных механизмах в качестве ходовых винтов. Винты с прямоугольным профилем резьбы, также применяют в качестве ходовых винтов, они имеют наименьшие потери на трение. Прямоугольный профиль резьбы не стандартный и применяется редко. На фиг. а, б, в, г, показаны варианты движения звеньев.
Фиг. а. Гайка неподвижна
При вращении винта он перемещается поступательно вдоль своей оси. Изменение направления поступательного движения винта осуществляется изменением направления его вращения. По такой схеме выполнены микрометрические устройства различных назначений: измерительный микрометр, узел точной наводки геодезических приборов и других.
Фиг. б. Нет осевого перемещения винта Ведущим звеном является винт, ведомым – гайка. При вращении винта гайка перемещается поступательно вдоль его оси. Данный механизм применяется для перемещений кареток оптических головок, а также в качестве ограничителя вращения.
Фиг. в. Нет осевого перемещения гайки
Ведущим звеном является гайка, ведомым винт. При вращении гайки, винт перемещается поступательно вдоль своей оси. Механизм используется для установочных движений, в точных приборах и устройствах используется редко.
Фиг. г. Дифференциальный винт с двумя винтовыми парами Ведущим звеном является винт, ведомым – гайка. Винт имеет две резьбы с разным шагом. Направление нарезки может быть одинаковым (что делают очень редко) и разным. При вращении винта, он перемещается поступательно вдоль всоей оси относительно неподвижной гайки и одновременно перемещается вдоль винта подвижная гайка по второй винтовой нарезке. Полное перемещение подвижной гайки определяется алгебраически суммированием перемещения винта относительно неподвижной гайки перемещения подвижной гайки относительно винта. 128 Если нарезка резьб винта имеет одинаковое направление, то за один оборот винта подвижная гайка переместится вдоль его оси на сумму двух шагов винтовых нарезок, если нарезка имеет разное направление, то за один оборот винта подвижная гайка переместится на разность шагов винтовых нарезок в сторону нарезки большего шага. В этом случае можно получить очень малые перемещения подвижной гайки за один оборот винта и это используется в конструкциях дифференциальных микроскопических и счетно-решающих устройствах. На фиг. д,е,ж, з, даны конструкции специальных гаек, позволяющие уменьшить мертвый ход винтовой пары. Точность работы винтовой пары зависит от точности изготовления винта и гайки, а также от величины зазора в осевом направлении и от величины ошибки мертвого хода. На плакате показаны два способа уменьшения зазора и мертвого хода: осевой – (фиг. д, е) и радиальный – (фиг. ж,з). На фиг. д представлена конструкция гайки состоящей из двух половинок, соединенных между собой винтами. Разворотом одной половинки гайки относительно другой можно уменьшить величину осевого зазора и, следовательно, величину мертвого хода до минимального значения. На фиг. е. приводится конструкция гайки, состоящей из двух половин. Здесь штифт и продольный паз позволяют половинкам гайки перемещаться под действием пружины только в осевом направлении. Тем самым выбирается осевой зазор и устраняется мертвый ход. Полностью устранить мертвый ход можно при условии, если сила пружины будет больше нагрузки. На фиг. ж дана конструкция разрезной гайки со стяжным винтом. При стягивании половинок гайки, уменьшается зазор между витками нарезки, а следовательно уменьшается мертвый ход.
На фиг. з показана конструкция гайки, выполненная в виде цангового зажима. При надвигании наружного конуса на разрезной внутренний конус уменьшается зазор между витками нарезки и уменьшается мертвый ход винтовой пары. Метод уменьшения мертвого хода за счет радиального смещения элементов нарезки гайки (фиг. ж,з) не применим при прямоугольной нарезке. На фиг. и, к, л, м, н приведены примеры конструкций винтовых механизмов.
Фиг. и. Измерительный микрометр Состоит из подвижного винта, неподвижной гайки и устройства в виде цангового зажима для уменьшения мертвого хода. При вращении винта, он перемещается в осевом направлении.
Фиг. к. Механизм регулировки опор Конструкция ясна из чертежа. С помощью винта 1 производится регулировка по высоте установки призмы ножевой опоры, а винтом 2 – регулировка призмы в горизонтальной плоскости.
Фиг. л. Винтовой механизм штангенциркуля Ведущим звеном является гайка 1, при ее вращении винт 2 с подвижной частью штангенциркуля перемещается поступательно относительно неподвижной. Винтовой механизм служит для точной установки нониуса на заданный размер.
Фиг. м. Дифференциальный винтовой механизм Он имеет две винтовых пары: винт – 1 (ведущее звено), гайка 2 (корпус) и винт 3 и гайка 1. Винтовые пары имеют нарезки одного направления с разными шагами. За один оборот детали 1 винт 3 перемещается поступательно на разность шагов нарезок винтовых пар. Указанный механизм применяется в микрометрических винтах.
129 Фиг. н. Шариковая винтовая пара с поступательно-перемещающейся гайкой Между нарезанными поверхностями винта и гайки заложены шарики. При вращении винта шарики, пройдя путь по резьбе гайки, попадают в возвратный желоб, соединяющий конец винтовой канавки гайки с ее началом. Шариковый винтовой механизм имеет высокий к.п.д. вследствие замены трения скольжения в винтовой паре трением качения. Он применяется в сервоприводах аварийной защиты и других приборных устройствах счетно-решающей техники.
|
|||||||
|
|
Последнее изменение этой страницы: 2019-12-25; просмотров: 297; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.12.153.110 (0.018 с.) |