Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
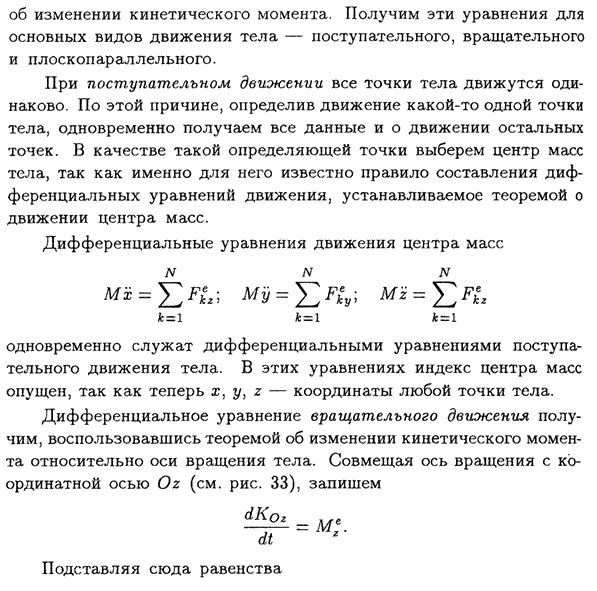
Дифференциальные уравнения плоского движения твердого тела. ⇐ ПредыдущаяСтр 2 из 2
Физический маятник. Физический маятник — осциллятор, представляющий собой твёрдое тело, совершающее колебания в поле каких-либо сил относительно точки, не являющейся центром масс этого тела, или неподвижной оси, перпендикулярной направлению действия сил и не проходящей через центр масс этого тела. Дифференциальное уравнение движения физического маятника Пренебрегая сопротивлением среды, дифференциальное уравнение колебаний физического маятника в поле силы тяжести записывается следующим образом:
Полагая
Последнее уравнение аналогично уравнению колебаний математического маятника длиной. Величина называется приведённой длиной физического маятника. Центр качания физического маятника Центр качания — точка, в которой надо сосредоточить всю массу физического маятника, чтобы его период колебаний не изменился. Поместим на луче, проходящем от точки подвеса через центр тяжести точку на расстоянии l от точки подвеса. Эта точка и будет центром качания маятника. Действительно, если всю массу сосредоточить в центре качания, то центр качания будет совпадать с центром масс. Тогда момент инерции относительно оси подвеса будет равен Элементарная и полная работа силы. Мощность. Работа силы. Мерой действия силы при превращении механического движения в другую форму движения является работа силы. Работа постоянной по модулю и направлению силы F на прямолинейном перемещении s ее точки приложения равна
Если угол α острый, то работа силы положительна, если тупой – отрицательна. Если направления силы и перемещения совпадают (α=0), то A = Fs; Если направление силы перпендикулярно направлению перемещения (α=90◦), то А = 0; Если направление силы противоположно направлению перемещения (α=180◦), то A = -Fs. Элементарная работа силы F на перемещении точки из одного положения в другое по криволинейной траектории δA = Fδs cos (F,v), где δs – пройденный точкой элементарный путь; ∠F, v – угол, составленный направлением силы F и скоростью v. В случае переменной силы определяется элементарная работа на малом перемещении, и после суммирования элементарных работ получается
Мощность Мо́щность — физическая величина, равная в общем случае скорости изменения энергии системы. В более узком смысле мощность равна отношению работы, выполняемой за некоторый промежуток времени, к этому промежутку времени. Различают среднюю мощность за промежуток времени
и мгновенную мощность в данный момент времени:
Интеграл от мгновенной мощности за промежуток времени равен полной переданной энергии за это время:
Работа силы тяжести и силы упругости. Работа силы тяжести Сила тяжести равна F = mg и направлена по вертикали вниз. Вблизи поверхности Земли ее можно считать постоянной. При движении тела по вертикали вниз сила тяжести совпадает по направлению с перемещением. При переходе с высоты h1 над каким-то уровнем, от которого мы начинаем отсчет высоты, до высоты h2 над тем же уровнем (рис. 192), тело совершает перемещение, по абсолютной величине равное h1 - h2.
Так как направления перемещения и силы совпадают, то работа силы тяжести положительна и равна:
Высоты h1 и h2 не обязательно отсчитывать от поверхности Земли. Для начала отсчета высот можно выбрать любой уровень. Это может быть пол комнаты, стол или стул, это может быть и дно ямы, вырытой в земле, и т. д. Ведь в формулу для работы входит разность высот, а она не зависит от того, откуда начинать их отсчет. Мы могли бы, например, условиться начинать отсчет высоты с уровня В (см. рис. 192). Тогда высота этого уровня была бы равна нулю, а работа выражалась бы равенством A=m*g*h где h — высота точки A над уровнем В.
Работа силы упругости Сила упругости, как мы знаем, возникает при деформации тел. По своему абсолютному значению она пропорциональна величине деформации (удлинению), а направлена в сторону, противоположную направлению смещения точек тела при деформации. На рисунке 199, а показана пружина в ее естественном, недеформированном состоянии. Правый конец пружины закреплен, а к левому прикреплено тело. Если пружину сжать, сместив левый ее конец па расстояние x1 (рис. 199, б), то возникнет сила упругости, действующая со стороны пружины на тело, равная:
F1упр=—kx1 где k — жесткость пружины.
Предположим, что левый конец пружины переместился из положения А в положение В (рис. 199, в). В этом положении деформация пружины равна уже не х1, а х2. Значит, конец пружины переместился на расстояние х2 — х1. Чтобы вычислить работу, нужно это перемещение умножить на силу. Но сила упругости в отличие от силы тяжести вблизи поверхности Земли при движении тела изменяется от точки к точке. Если в начальной точке она была равна —kx1, то в конечной точке (в точке В) она стала равной —kx2. Для того чтобы вычислить работу силы упругости, нужно взять среднее значение силы упругости и умножить его на перемещение х2 — х1. Сила упругости пропорциональна деформации пружины. Поэтому среднее значение силы упругости можно найти, используя метод, который был использован при нахождении среднего значения скорости при равноускоренном движении. На это-то значение силы упругости и нужно умножить перемещение х2 — х1 чтобы получить работу этой силы:
|
||||||
|
|
Последнее изменение этой страницы: 2016-04-07; просмотров: 1166; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.14.15.94 (0.009 с.) |


 .
. , предыдущее уравнение можно переписать в виде:
, предыдущее уравнение можно переписать в виде: .
. , а момент силы тяжести относительно той же оси
, а момент силы тяжести относительно той же оси  . Легко заметить, что уравнение движения не изменится.
. Легко заметить, что уравнение движения не изменится.






 Так как
Так как  то формула для работы принимает вид:
то формула для работы принимает вид: