
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Точность геометрической формы деталей
Точность деталей по геометрическим параметрам характеризуется не только отклонениями размеров, но и отклонениями поверхностей. При этом отклонение поверхностей определяется отклонениями формы, отклонениями расположения поверхностей, волнистостью и шероховатостью. К отклонениям формы деталей, имеющих плоские сопрягаемые поверхности, относятся непрямолинейность и неплоскостность Непрямолинейность – отклонение от прямой линий профиля сечения поверхности плоскостью, нормальной к ней, в заданном направлении. Неплоскостность – отклонение от прямолинейности в любом направлении по поверхности, например выпуклость, вогнутость. Отклонение расположения поверхностей (осей, профилей) представляет собой отклонение реального расположения поверхности, оси или профиля от номинального расположения. Номинальное расположение определяется номинальными линейными или угловыми размерами между рассматриваемой поверхностью (прямой, профилем) и базой. Базой называют поверхность, ось, точку, по отношению к которым заданы допуски расположения. Шераховатость поверхностей. 1.
Если детали имеют одинаковую шероховатость, то ее обозначение выносится в верхний правый угол чертежа. При различной шероховатости поверхностей на каждый участнок наносится обозначение соответсвующее шероховатости.
3. Кинематические и энергетические параметры передач. Основы теории точности механизмов. Кинематическая точность. Методы определения. Кинематические и энергетические параметры передач. Передаточное отношение – отношение вращения угловых скоростей или састот вращения.
Передаточное отношение будет положительным, если направление вращения звеньев, между которыми осуществляется передача движения совпадает, и отрицательным, если звенья вращаются в разные стороны. Кроме этого может быть определено по числу зубьев. U1.2=z2/z1 Если привод состоит из нескольких последовательно соединенных передач, то его передаточное отношение равно п/о всех передач. Основные характеристики передач. Мощность, передаваемая телом вращения P=Ft*V Ft- окружная сила, направленная по касательной к траектории точки ее приложения
V – окружная скорость – линейная скорость точек вращающегося тела диаметром Д, от оси вращения на д/2 Вращающий момент, передаваемый телом вращения Т=Р/w=Ftd/2 КПД передачи предсталяет собой безразмерную величину, характерную степерь совершенства технического устройства в отношении осущ. В нем процессов передачи энергии. Ƞ=Р2/Р1 Р2 – ведущее колесо, Р1 – ведомое колесо КПД сост из нескольких мех приводов Ƞ= Ƞ1 Ƞ2….. Ƞк Основы теории точности механизмов. Теория точности позволяет решать задачи анализа точности разнообразных механических систем как при проектировании, изготовлении, так и в процессе эксплуатации прибора. В теории точности используют два основных принципа: · Принцип независимости действия действующих неопределенностей, который заключается в том, что все действующие неопределенности являются взаимно независимыми, т.е. значение одной из неопределенностей не определяет значений остальных. Этот принцип позволяет при суммировании действующих неопределенностей пользоваться принципом суперпозиции; · принцип суперпозиции действующих неопределенностей, который заключается в том, что суммарное воздействие на выходную величину всех неопределенностей равно сумме воздействий каждой из действующих неопределенностей т.е. Кинематическая точность. Кинематическая точность зубчатого колеса определяет величину полной погрешности его поворота за один оборот. Эта погрешность возникает в результате непостоянства радиального положения осей заготовки и инструмента, а также в результате погрешности обката зубообрабатывающего станка.
|
||||||
|
|
Последнее изменение этой страницы: 2016-04-07; просмотров: 1196; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.221.13.173 (0.006 с.) |
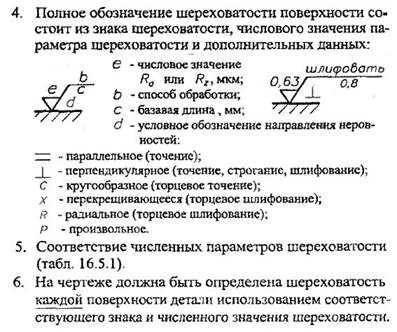 Для обозначения шероховатости поверхностей используются следующие знаки:
Для обозначения шероховатости поверхностей используются следующие знаки: 





