Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Состояния равновесия при номинальном режиме
Найдём состояние равновесия системы при изменении давления пара В качестве начального вектора
В качестве коэффициентов регулятора примем kp= Ti= 1; Для этого воспользуемся следующей командой:
kp = 1; Ti = 1; x0 = [1.30;20;8]; y0 = 1.7; u0 = 1.3; iu = [1]; [x,u,y,dx] = trim('m', x0, u0, y0, [], iu, [])
Результат выполнения:
x = 1.3004 19.9916 7.9966
u = 1.3000
y = 1.7004
dx = 1.0e-012 * -0.0777 -0.2892
Таким образом, значение скорректированного вектора равновесия:
Регулятор реализует ПИ-закон управления. Для определения влияния значения коэффициентов регулятора на статику, проведём вычислительный эксперимент при разных значениях Для этого воспользуемся следующими командами:
kp = 1; Ti = 1; x0 = [1.3004;19.9916;7.9966]; y0 = 1.7; u0 = 1.3; iu = [1]; x = x0; i = 1; for kp = 0.1:0.1:10 for Ti = 0.1:0.1:10 i = i + 1 [x(:,i),u,y,dx] = trim('m', x0, u0, y0, [], iu, []); end end fd = max(rot90(x)) - min(rot90(x)) В результате, мы получили: fd(1) = fd(2)= fd(3) = 0.
fd(i) характеризует размах выборки, по каждой из координат вектора состояния. Т.к. размах нулевой для всех координат, то можно заключить, что коэффициенты регулятора, не оказывают влияния на значение вектора состояния.
Состояния равновесия при заданном режиме Изменяя начальные значения вектора состояния равновесия, произведем анализ возможности существования других состояний равновесия для заданного режима ( Область поиска состояний равновесия ограничим допустимыми значениями выходов интегрирующих звеньев. А именно:
1 кгс/см2< 0 мм < 0 В < Для автоматизации поиска равновесных состояний воспользуемся следующим кодом: kp = 1; Ti = 1; y0 = 1.7; u0 = 1.3; iu = [1]; i = 1; x = [0;0;0];
for Puk = 1:0.35:3.8 for mrkuk = 0:6.25:50 for Ur = 0:1.25:10 x0 = [Puk;mrkuk;Ur]; [x(:,i),u,y,dx] = trim('m', x0, u0, y0, [], iu, []); i = i + 1 end end end
Для определения наличия различных состояний равновесия воспользуемся следующими командами:
fd = max(rot90(x)) - min(rot90(x))
fd(i) характеризует размах выборки, по каждой из координат вектора состояния. Т.к. размах нулевой для всех координат, то можно заключить, что в заданной области поиска существует только одно состояние равновесяи. Значение координат вектора состояния равновесия для заданного режима:
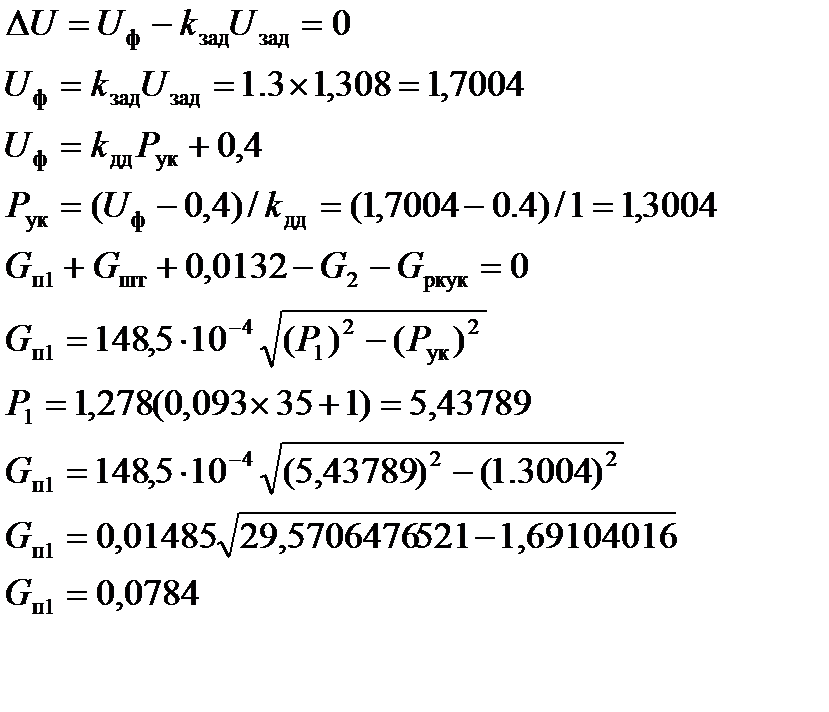
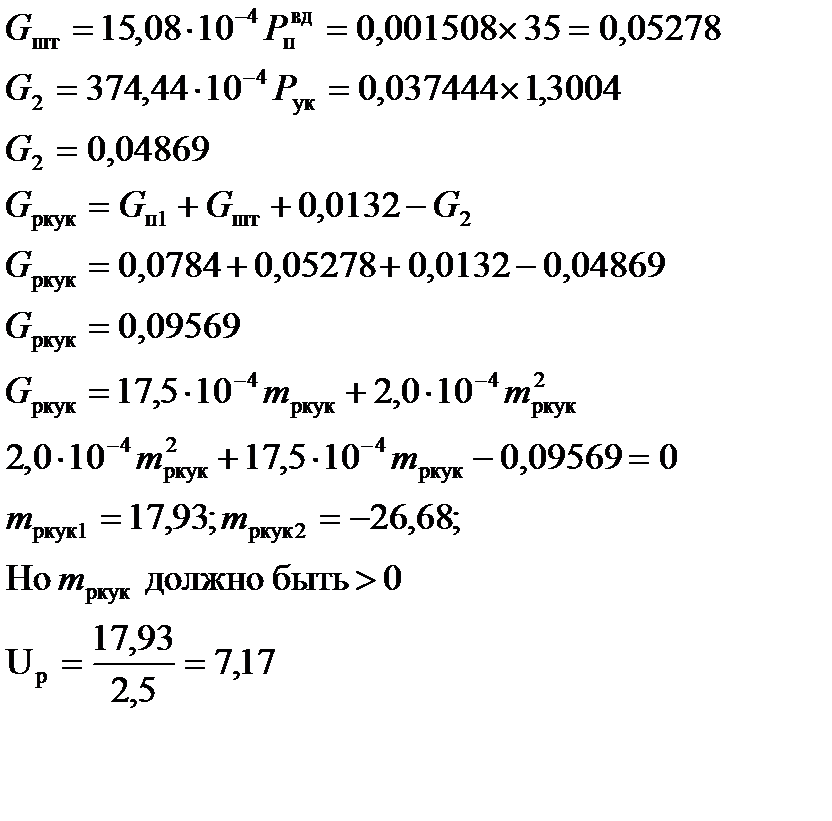
Аналитическое исследование существования состояний равновесия: Для состояния равновесия необходимо, чтобы сигнал на входе интеграторов равнялся 0, следовательно:
Аналитическое исследование показало те же результаты, что и исследование численными методами.
|
|||||||
|
|
Последнее изменение этой страницы: 2017-02-21; просмотров: 212; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.117.152.251 (0.006 с.) |

 приближения к равновесию принимаем значения, отвечающие номинальному режиму. А именно:
приближения к равновесию принимаем значения, отвечающие номинальному режиму. А именно: кгс/см2;
кгс/см2;  В;
В;  В;
В;  мм;
мм;  В;
В; кгс/см2;
кгс/см2; мм.
мм. В;
В; В;
В; и
и  .
. = 35 кгс/см2).
= 35 кгс/см2). < 3.8 кгс/см2 [1]
< 3.8 кгс/см2 [1] < 50 мм
< 50 мм < 10В [2]
< 10В [2] кгс/см2;
кгс/см2; мм.
мм. В;
В; В;
В;