
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Уравнения движения двухгироскопной СПСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте Уравнения движения двухгироскопной СП Математическая модель двухгироскопной одноосной СП
В спарнике существует дополнительное трение по оси прецессии. Любой момент Составим математическую модель двухгироскопной одноосной СП. Будем считать, что моменты инерции гироскопов одинаковые, а роторы гироскопов в установившемся движении вращаются с одинаковыми по значению скоростями в противоположные стороны, т. е.
где оси Угловая скорость кожуха второго гироскопа имеет значение
Матрица Проделав те же преобразования, что и ранее, получим:
где Углы
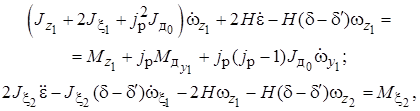
Уравнения (2.19) отличаются от (2.18) удвоенными значениями момента инерции гироскопа и его кинетического момента, а также не содержат
Вынужденные колебания СП с нелинейными элементами(Вынужденные колебания СП и гироузла; Вынужденные колебания СП) Вынужденные колебания платформы, содержащей элементы Методы автокомпенсации уходов СП Автокомпенсация уходов СП Суть способов автокомпенсации заключается в модуляции скорости уходов СП периодической функцией. Уход при этом становится знакопеременным, накопленный угол ухода снижается либо устраняется полностью. Cнижение ухода достигается автономно, без привлечения информации от дополнительных источников [17]. Получили распространение следующие способы автокомпенсации: 1. Принудительное вращение опор гироблока – моменты трения снижаются и становятся знакопеременными. 2. Непрерывное вращение входных осей двухстепенных гироскопов (осей стабилизации): а) вокруг выходных осей (осей прецессии), б) вокруг главной оси гироскопа. 3. Принудительное вращение подвесов гироскопов индикаторных платформ. 4. Периодическое реверсирование векторов Кратко рассмотрим каждый из этих способов. Двухстепенных гироскопов Рассмотрим схему, представленную на рис. 17.1. Двигатель Д вращает синхронно статоры датчиков ДУε1, ДУε2 и ротор преобразователя координат ПК1 с угловой скоростью
Определим, какие моменты должны развивать
Сделав преобразования, получим:
Преобразователи координат ПК1и ПК2формируют управляющие сигналы, согласующие моменты:
Эти соотношения необходимо использовать при выводе уравнений. Составляя и анализируя уравнения движения, можно обнаружить, что в результате принудительной прецессии: 1. Уходы из-за конических колебаний на качке значительно снижаются. Это происходит за счет вращения выходных осей относительно «конуса» качки. 2. То же происходит по уходам из-за динамической несбалансированности ротора (вращается сам «конус»). 3. Платформа не имеет ухода по углам 4. При действии постоянных возмущающих моментов Уравнения движения двухгироскопной СП
|
||
|
|
Последнее изменение этой страницы: 2017-02-08; просмотров: 514; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.11 (0.009 с.) |

 Из выражения (2.17) видно, что на работу СП влияют
Из выражения (2.17) видно, что на работу СП влияют  и
и  . При повороте основания СП вокруг вертикальной оси вектор кинетического момента сохраняет свое положение в инерциальном пространстве. При этом с ДУεснимается сигнал, который отрабатываетcя контуром стабилизации. При медленных эволюциях работа СП не нарушается, только возникают погрешности; при быстрых же может происходить потеря функционирования СП. Для исключения данного влияния применяются спаренные гироскопы (рис. 2.4).
. При повороте основания СП вокруг вертикальной оси вектор кинетического момента сохраняет свое положение в инерциальном пространстве. При этом с ДУεснимается сигнал, который отрабатываетcя контуром стабилизации. При медленных эволюциях работа СП не нарушается, только возникают погрешности; при быстрых же может происходить потеря функционирования СП. Для исключения данного влияния применяются спаренные гироскопы (рис. 2.4). вызывает уход платформы, не компенсируемый системой стабилизации. Поэтому в точных платформах такие схемы не применяются.
вызывает уход платформы, не компенсируемый системой стабилизации. Поэтому в точных платформах такие схемы не применяются. ,
,  . Спарник можно рассматривать как редуктор с передаточным числом
. Спарник можно рассматривать как редуктор с передаточным числом  . Тогда к уравнениям (2.12) одноосного стабилизатора необходимо добавить уравнения второго гироскопа. Вместе с (2.14) получим:
. Тогда к уравнениям (2.12) одноосного стабилизатора необходимо добавить уравнения второго гироскопа. Вместе с (2.14) получим:

 связаны с первым гироскопом, а
связаны с первым гироскопом, а  – со вторым;
– со вторым;  – угол перекоса оси
– угол перекоса оси  второго гироскопа;
второго гироскопа;  – момент реакции связи спарника.
– момент реакции связи спарника.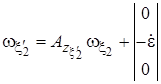 .
. направляющих косинусов осей
направляющих косинусов осей  второго гироскопа отличается от матрицы осей
второго гироскопа отличается от матрицы осей  только знаком угла
только знаком угла  .
.
 – двойной гиромомент;
– двойной гиромомент;  – момент инерции наружного кольца.
– момент инерции наружного кольца. и
и  . Принимая это во внимание и повторяя преобразования (2.14) и (2.18), окончательно получим:
. Принимая это во внимание и повторяя преобразования (2.14) и (2.18), окончательно получим: (2.19)
(2.19) .
. . Для этого устанавливают большее число гироскопов, переключаемых по определенному закону.
. Для этого устанавливают большее число гироскопов, переключаемых по определенному закону. . Система стабилизации по осям
. Система стабилизации по осям  и
и  отрабатывает внешнее возмущение и обеспечивает непрерывное прецессионное вращение
отрабатывает внешнее возмущение и обеспечивает непрерывное прецессионное вращение  и
и  вокруг оси
вокруг оси  .
.
 и
и  для прецессии гироскопов с угловой скоростью
для прецессии гироскопов с угловой скоростью  и
и  . Тогда:
. Тогда: ;
; :
:  .
.


 из-за неравножесткости подвеса и линейных вибраций.
из-за неравножесткости подвеса и линейных вибраций. по осям стабилизации из-за вращения
по осям стабилизации из-за вращения  и
и  имеют колебательные составляющие на частоте
имеют колебательные составляющие на частоте 


