
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Системы счисления и цифровые коды. Экономичность системы счисления. 6Стр 1 из 12Следующая ⇒
БЕЛОРУССКИЙ НАЦИОНАЛЬНЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ - ФИТР- Краткий конспект по экзаменационным вопросам по «Системам программного управления технологическими комплексами». Зимняя сессия 2015/2016 учебного года МИНСК 2016 Экзаменационные вопросы по «Системы программного управления технологическими комплексами». Зимняя сессия 2015/2016 учебного года. 1.Определения автоматизированного производства. Структура автоматизированного производства.______________________________________4 2.Определения и классификация программного управления._______________ 5 Системы счисления и цифровые коды. Экономичность системы счисления. 6 4.построение двоично-десятичных кодов. Пример._________________________7 5.Комбинаторные коды. Коды Грея и Джонсона. Пример___________________8-9 6.Корректирующая способность кода.____________________________________10 7.Коды, обнаруживающие ошибки. Пример.______________________________7-8 8.Код Хемминга. Пример._______________________________________________13 9.Международный код lSO-7bit. Структура управляющей программы._______14 10.Международный код lSO-7bit. Функции G и М. Прим. Использования.15-16. 11программирование размерных перемещений, коды F, S, Т._______________17 12.программирование линейной и круговой интерполяции. Пример._____ 18-19 13.Контроль информации в коде lSO-7bit.________________________________20 14.Ручной, диалоговый и автоматический способы подготовки УП.________ 21 15.Коррекция радиуса и положения инструмента при прямоугольном формообразовании.____________________________________________________22 16.Коррекция инструмента при непрямоугольном формообразовании.___23-24 17.Повышение языкового уровня управляющих программ. Пример._____25-26 18.Программирование на основе стандарта STEP-NC.__________________27-28 19.Интерполяторы. Типы интерполяторов.___________________________29-30 20.Аппроксимация нелинейных участков траектории рабочего органа.__31-32 Линейный интерполятор по методу оценочной функции (МОФ). Пример.33 Модифицированный алгоритм линейной интерполяции по МОФ Пример.34 23.Круговая интерполяция по методу оценочной функции. Пример._________35 24.Модифицированный алгоритм круговой интерполяции по МОФ. Пример._36 Интерполяция на основе цифр. дифференциальных анализатор. Прим.37-38 26.Интерполяция методом цифрового интегрирования. пример._________39-40 Интерполятор на основе интегратора с параллельным переносом. Схема.41
28.Интерполятор на основе интегратора с последовательным переносом Сигнальная диаграмма._____________________________________________42-43 29.Сплайновая интерполяция в системах ЧПУ._______________________44-45 30.Классификация систем числового программного управления.___________46 31.Задачи систем числового программного управления.___________________47 32.Модульная архитектура систем ЧПУ на прикладном уровне.__________48 33.Микропроцессорная система ЧПУ. Функциональная схема.___________49 34.Системы прямого цифрового управления. Типовая структура и функции системы._____________________________________________________________50 35.Системы прямого цифрового управления. Информац. потоки системы….51 36.Классификация систем управления промышленными роботами.__________52 37.Цикловые системы управления промышленными роботами.____________53 38.Позиционно-контурные системы управления промышленными роботами._54 39.Универсальные и групповые системы управления промышленными роботами.___________________________________________________________55-56 40.Микропроцессорная система управления промышленным роботом «Сфера- 36»._______________________________________________________________57 41.Программирование промышленных роботов.______________________58-59 42.РТК на основе металлорежущих станков.__________________________60 43.РТК кузнечно-штамповочного производства._______________________61 44.РТК сборочного производства.____________________________________62-63 45.РТК сварочного производства и нанесения покрытий._______________64-65 46.Информационная система программного управления._______________66-67 47.Система технического зрения._____________________________________47 48.Система искусственного очувствления.____________________________48 Определения автоматизированного производства. Структура автоматизированного производства.
Комбинаторные коды. Код Грея и Джонсона. Пример. Код, обладающий арифметическими свойствами, называется арифметическим. Код, не обладающий арифметическими свойствами, наз. комбинаторным (по названию раздела математики-комбинаторики). Однопеременным наз. код, у кот. Кодовое расстояние равно единице, т.е. при переходе от одной кодовой комбинации к соседней, знак меняется лишь в одном разряде (например 0110, 0111, 0101). Построить однопеременный код можно с помощью диаграммы Карнауга, кот. Имеет 4 столбца и 4 строки. На их пересечении образуется 16 ячеек. Каждая ячейка и каждый столбец нумеруется. Адрес каждой ячейки формируется из номера строки и номера столбца. Задается направление обхода диаграммы, и последовательно выписываются их адреса. Такой код наз. кодом Грея. Правила построения: -направление обхода выбирается произвольно, одну и ту же вершину нельзя обходить дважды, запрещается движение по диагонали. Применение кода Грея повышает надежность кодирования.
Международный код lSO-7bit. Функции G и М. Примеры использования. <подготовительная функция>-G предусматривает G00…G99 слово служит для указания дополнительной информации содержащейся в кадре. Все подготовительные функции разделяются на группы ортогональных функций, то есть взаимоисключающих, так что указание всего лишь одной подготовительной функции из группы ортогональных исключит применение другой функции из этой же группы. Задача стабилизации скорости резанья особенно актуальна при обработке изделий большого диаметра.
Вспомогательная функция M Технологические команды языка начинаются с буквы М. Включают такие действия, как: -Сменить инструмент -Включить/выключить шпиндель -Включить/выключить охлаждение -Работа с подпрограммами
FST
F-код скорости подачи. Код T, за которым следует два знака, указывает на позицию механизма смены инструмента. Сам механизм смены инструмента может быть барабанным или ленточным (транспортёр). Слово S---- частоты вращения шпинделя.
Программирование линейной и круговой интерполяции. Пример. Линейная интерполяция: Управляющая программа обработки детали представляет собой траекторию движения центра фрезы. Траектория движения состоит из отдельных, соединяющихся друг с другом участков, линейных или дуговых. Точки, которые задают траекторию, называются опорными. В действительности управляющая программа – это последовательный набор опорных точек. Опорные точки могут лежать в плоскости, для их задания используется две координаты (двух координатная обработка) или в пространстве (объемная трех координатная обработка). Чтобы использовать линейный интерполятор (осуществлять программирование линейных перемещений) используется подготовительная функция G01 и указываются координаты конечной точки перемещения с заданной скоростью.
X, Y, Z – адреса линейных осей; F – скорость перемещения;
Например, для программирования прямолинейного перемещения из точки A в точку B со скоростью 1000 мм/мин необходимо в УП сформировать следующий кадр:
Круговая интерполяция: Под круговой интерполяцией следует понимать движение инструмента по дуге. Первые системы ЧПУ оснащались линейными интерполяторами и программирование такого движения для программиста было затруднено. Дуги и окружности приходилось аппроксимировать прямыми линиями, т.е. просчитывать промежуточные точки. На рисунке ниже необходимо линейно аппроксимировать участок дуги AB. Отклонение
Зная допустимую погрешность аппроксимации d можно рассчитать угловой шаг df = arcos((R-d)/R), a число сегментов аппроксимации на заданном участке n = f2-f1/df. Линейно-круговые интерполяторы позволяют отработать движение как по прямой, так и по дуге. Это избавило инженеров-программистов от рутинных вычислений. Повышение языкового уровня управляющих программ. Пример. Стандартный язык ISO-7bit не позволяет в полной мере описать требуемые режимы и геометрию деталей в связи м чем в системах ЧПУ помимо стандартных ф-ций могут применяться макроопределения готовых форм и стандартных циклов, подпрограмм пользователя, а также автоматизированная диалоговая подготовка управляющих программ. Стандартный цикл устанавливает строго определённую посл-ность движений, параметры которых даны в тексте управляющей программы. Фиксация некоторых пар-ов может быть выполнена разработчиком СУ либо станкостроителем при стыковке СУ с объектом. В некоторых случаях стандартные циклы могут трактоваться как подпрограммы, постоянно хранимые в устр-ве ЧПУ. Некоторые стандартные циклы:
Готовые формы явл.принадлежностью матем. Обеспечения спец. Системой ЧПУ. Заранее готовой формы сост. Лишь в привязке к контуру детали, а её вызов может быть осуществлён путём обращения к подпрограмме по G-функции, либо указанием спец. выделенной клавишей. Пример формы:
При многократном выполнении определённых действий часть упр. Программы может быть вынесена в виде подпрограммы. Вызов подпрограммы осуществляется командой L с указанием 5-тиразрядного кода. 3 старших разряда указывают номер подпрограммы, а младшие 2 разряда – число повторений подпрограммы. В подпрограммах целесообразно использование относительной системы отсчёта, не привязываясь к базовой системе координат станка. Использование абсолютной системы отсчёта требует внесение корректировок в систему координат станка. Макроязык пользователя расп. след возможностями: 1)манипуляции с с пар-рами, организация условных и безусловных переходов 2)Доступ к входным цифровым регистрам СУ с послед. Обработкой воспринимаемых сигналов. 3)Формирование любых пользовательских сообщений на экране дисплея.
Модифицированный алгоритм линейной интерполяции по МОФ Пример..
Усовершенствованный метод оценочной функции позволяет повысить скорость отработки перемещения, которая в случае траектории под углом 45° может быть повышена в 2 раза. Минимальная скорость подачи определяется по выражению: vмин=h/Tн h – единичный шаг, определяемый дискретностью системы, Tн – время реализации алгоритма подачи. Требуемая частота импульсов определяется скоростью подачи и углом наклона к осям.
Погрешность расчета траектории по данному методу не превышает дискретности системы ЧПУ
23.Круговая интерполяция по методу оценочной функции. Пример. Применение оценочной функции для круговой интерполяции производится тем же способом, что и для линейной. Xi2+yi2=R2 Fi= xi2+yi2-R2
Знак оценочной функции определяет операцию управления на следующем шаге. Для интерполяции по дуге окружности необходимо знать центр квадранта, координаты начальной и конечной точек, а также радиус дуги окружности. Для воспроизведения дуги окружноcти в 1-м квадранте. F>0 xi+1=xi-1 yi+1=y
Если оценочная функция больше 0, то делается шаг по координате х (по у неизменна) F>0 xi+1=xiyi+1=y+1 После очередного шага осуществляется сравнение текущих координат с конечными и если они не совпадают, то алгоритм повторяется. Определим оценочную функцию после следующего шага по координате х. Fi+1=(xi-1)2+yi2-R2=Fi-2x+1 Определим оценочную функцию после следующего шага по координате y. Yi+1=y+1 xi+1=x Fi+1=xi2+(yi+1)2-R2=Fi+2yi+1
24.Модифицированный алгоритм круговой интерполяции по МОФ. Пример. для повышения контурной скорости можно усовершенствовать алгоритм круговой интерполяции. усовершенствование алгоритма закл в том что как и при линейн. интерполяции по ведущей коорд-те приращения выдаются на каждом шаге.отличие от линейн интерполяции в данн случае закл в следующем:если участок интерполяции в пределах одного квадранта охватывает угол
Введём обозначения
25.Интерполяция на основе цифровых дифференциальных анализаторов пример Интерполяция с использов.ЦДА заключается в моделировании дифуравнений воспроизв.траектории с помощью специальных вычислительных устройств,называемых дифференциальными анализаторами.В данном методе в отличии метода оценочн. ф-иимоделируется не алгебраич. ур-ние а его 1-ая производная или дифф.уравнение.Решение дифуравнений с помощью ЦДА осуществл. путём перехода к разностным ур-ниям с последующим их решением.В связи с чем задача интерполяции по методу ЦДА сводится к следующему:1)Находится обыкновенное дифуравнение,решение которого является уравнение траектории рабочего органа.2)Составляется аналоговая модель для решения данного ур-ния.3)на основе аналоговой модели строится ЦДА, осуществляющий решение ур-ний в цифровом виде(разностном виде). Для интерполяции прямолинейного участка траектории:
Рис а: для линейн интерполят-ра по коорд-те у. В регистр RG запис. знач-е подынтегральн. ф-ии,которая через элем-ты И подаётся на если
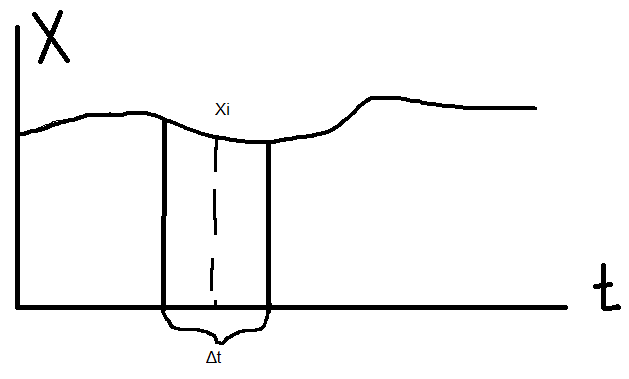
26.Интерполяция методом цифрового интегрирования. пример. Метод цифрового интегрирования (МЦИ) заключается в том, что приращения по координатам вычисляются за определённый кварт времени и могут отличаться от единичных. При использовании метода цифрового интегрирования значение i- той координаты и скорость её изменения в момент времени t могут быть вычислены по формулам:
Определение траектории движения формируется путём задания закона изменения ускорения в функции времени Наиболее трудоёмким методом цифрового интегрирования является метод Эйлера:
Реализация круговой интерполяции требует решения ДУ окружности. Для обеспечения требуемой точности требуется использование алгоритмов, которые требуют дополнительных затрат и времени. Поэтому на практике применяются более простые методы приближённого расчёта. Аналогично уравнениям при линейной интерполяции, уравнения для угловой интерполяции будут иметь вид:
Система ЧПУ формирует сигнал задания скорости на привода, которые получаются путём расчёта приращений по координатам
27.Интерполятор на основе интегратора с параллельным переносом. схема
28.Интерполятор на основе интегратора с последовательным переносом Сигнальная диаграмма.
РТК нанесения покрытий. Применение промышленных роботов на операциях нанесения покрытий определяется не только тяжелыми физическими условиями работы, но и опасностью работы персонала. В машиностроении широкое распространение нашли следующие способы нанесения покрытий: 1) пневматическое и безвоздушное распыление 2) окраска в электростатическом поле 3) струйным обливом 4) окраска методом электроконденсации Выбор метода окраски зависит от типа производства (единичное, серийное, крупносерийное, и т.д.), от габаритов изделия и его формы, от требований предъявляемых к покрытиям. При этом на методы распыления, как наиболее простые приходится до 70% изделия. К промышленным роботам и системе управления РТК нанесения покрытий предъявляются следующие требования: 1) Система управления промышленным роботом - контурная. 2) Точность позиционирования не должно превышать ± 3 мм. 3)Высокое быстродействие(выше чем для промышленных роботов на сварочных операциях). 4)Применяемые промышленные роботы должны быть герметизированы и допускать эксплуатацию в условиях агрессивной среды. В качестве основного средства автоматизации могут выступать как собственно промышленные роботы так и автоматизированная транспортная система. В зависимости от транспортного потока различают тупиковые (единичное и мелкосерийное производство) и проходные (серийное и массовое производство) транспортные системы.
БЕЛОРУССКИЙ НАЦИОНАЛЬНЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ - ФИТР- Краткий конспект по экзаменационным вопросам по «Системам программного управления технологическими комплексами». Зимняя сессия 2015/2016 учебного года МИНСК 2016 Экзаменационные вопросы по «Системы программного управления технологическими комплексами». Зимняя сессия 2015/2016 учебного года. 1.Определения автоматизированного производства. Структура автоматизированного производства.______________________________________4 2.Определения и классификация программного управления._______________ 5 Системы счисления и цифровые коды. Экономичность системы счисления. 6 4.построение двоично-десятичных кодов. Пример._________________________7 5.Комбинаторные коды. Коды Грея и Джонсона. Пример___________________8-9 6.Корректирующая способность кода.____________________________________10 7.Коды, обнаруживающие ошибки. Пример.______________________________7-8 8.Код Хемминга. Пример._______________________________________________13 9.Международный код lSO-7bit. Структура управляющей программы._______14 10.Международный код lSO-7bit. Функции G и М. Прим. Использования.15-16. 11программирование размерных перемещений, коды F, S, Т._______________17 12.программирование линейной и круговой интерполяции. Пример._____ 18-19 13.Контроль информации в коде lSO-7bit.________________________________20 14.Ручной, диалоговый и автоматический способы подготовки УП.________ 21 15.Коррекция радиуса и положения инструмента при прямоугольном формообразовании.____________________________________________________22 16.Коррекция инструмента при непрямоугольном формообразовании.___23-24 17.Повышение языкового уровня управляющих программ. Пример._____25-26 18.Программирование на основе стандарта STEP-NC.__________________27-28 19.Интерполяторы. Типы интерполяторов.___________________________29-30 20.Аппроксимация нелинейных участков траектории рабочего органа.__31-32 Линейный интерполятор по методу оценочной функции (МОФ). Пример.33 Модифицированный алгоритм линейной интерполяции по МОФ Пример.34 23.Круговая интерполяция по методу оценочной функции. Пример._________35 24.Модифицированный алгоритм круговой интерполяции по МОФ. Пример._36
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2017-02-05; просмотров: 573; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.144.113.197 (0.153 с.) |




 G01 X n.n Yn.n Z n.n Fn.n, где
G01 X n.n Yn.n Z n.n Fn.n, где (погрешность) от округлости с радиусом R определяется расстоянием d, очевидно, что чем меньше величина линейного участка dl, тем выше точность аппроксимации.
(погрешность) от округлости с радиусом R определяется расстоянием d, очевидно, что чем меньше величина линейного участка dl, тем выше точность аппроксимации.





 ,то ведущая координата меняется и это изменение происходит при
,то ведущая координата меняется и это изменение происходит при  .
.
 и для определения ведущей координаты вычислим разность
и для определения ведущей координаты вычислим разность  тогда получим что
тогда получим что  -ведущая координата при (
-ведущая координата при ( )<0,
)<0,  -ведущая координата при (
-ведущая координата при ( ,Таким образом, при
,Таким образом, при  и движении в пределах
и движении в пределах  выдача шагов производится по обеим координатам а при
выдача шагов производится по обеим координатам а при  -только по ведущей координате т е
-только по ведущей координате т е  .при
.при  и
и  выдача шагов производится по обеим координатам при
выдача шагов производится по обеим координатам при  -только по ведущей коорд-те т е
-только по ведущей коорд-те т е  .из рисунка видно что при модифицированном алгоритме круговой интерпол-ии по МОФ затрачивается меньше шагов это приводит к увеличению контурной скорости отработки траектории.
.из рисунка видно что при модифицированном алгоритме круговой интерпол-ии по МОФ затрачивается меньше шагов это приводит к увеличению контурной скорости отработки траектории. ,
,  ,
,  -приращение по соответствующим координатам.
-приращение по соответствующим координатам.  (1)для реализации кругового интерполятора запишем уравнение окружности:
(1)для реализации кругового интерполятора запишем уравнение окружности:  ;
;  ;
;  ;Вычисление интеграла в цифровой технике мож.быть выполнено по формулам прямоугольника и трапеции.
;Вычисление интеграла в цифровой технике мож.быть выполнено по формулам прямоугольника и трапеции.  (3)
(3) 
 ;Так как в устр-вах ЧПУ процессы интерполяции и выдачи управляющих команд между собой не связаны,то масштабные множители
;Так как в устр-вах ЧПУ процессы интерполяции и выдачи управляющих команд между собой не связаны,то масштабные множители  принять=1,тогда система(3) будет преобразована к виду:
принять=1,тогда система(3) будет преобразована к виду:  ;так как выходной сигнал интерполят. выдаёт в унитарн. коде,то приращение по координате нулевое или единичное.Ур-ния для трапеции и прямоуг. приобретают вид(*).На основе ур-ния(*) составл. схема интегратора,который может быть реализован параллельн. либо последов. переносом.
;так как выходной сигнал интерполят. выдаёт в унитарн. коде,то приращение по координате нулевое или единичное.Ур-ния для трапеции и прямоуг. приобретают вид(*).На основе ур-ния(*) составл. схема интегратора,который может быть реализован параллельн. либо последов. переносом. 
 ,при этом временные интервалы опред-тся тактовой частотой генератора,который задаёт масштабн. множ-ль
,при этом временные интервалы опред-тся тактовой частотой генератора,который задаёт масштабн. множ-ль  .частота переполнения этих имп-сов прямо пропорц числу
.частота переполнения этих имп-сов прямо пропорц числу  .связь между вых частотой и
.связь между вых частотой и  :
: 
 =
=  ,то приращ-е переменн по коорд-те у будет постоянно,т.е. движ-е будет происх с пост скоростью.Если величина подынтегр ф-ии
,то приращ-е переменн по коорд-те у будет постоянно,т.е. движ-е будет происх с пост скоростью.Если величина подынтегр ф-ии  (5);
(5); 

 .
.
 При реализации линейной интерполяции изменение скорости происходит по следующей диаграмме:
При реализации линейной интерполяции изменение скорости происходит по следующей диаграмме:
 На основании рисунка можно записать следующие выражения:
На основании рисунка можно записать следующие выражения: Вычисление такой системы затруднительно, и поэтому пользуются следующими выражениями:
Вычисление такой системы затруднительно, и поэтому пользуются следующими выражениями:

 C учётом всех преобразований получают выражения в координатах
C учётом всех преобразований получают выражения в координатах  ,
,  :
: :
:






