
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
В управлении судном с глубоководным оборудованием на буксире
При производстве глубоководных исследований с помощью буксируемых глубоководных, подводных, аппаратов (ПА) в абиссальных районах океана следует учитывать глубину погружения ПА (до 6·106 м и более), незначительную его относительную скорость (до 3 узлов) по профилю, необходимость стабилизации его расстояния от дна (10÷20 м), влияние глубоководных течений на ПА и кабель-трос (КТ), соединяющий НИС с ПА, их массу и объём, а также влияние ветровых и волновых воздействий на НИС при низкой динамичности последнего, причем последний фактор существенно снижает эффективность руля НИС и его управляемость. При синтезе алгоритмов управления НИС с ПА на буксире возникает необходимость решения двух основных взаимосвязанных задач: определения отклонения ПА относительно заданной линии профиля в горизонтальной плоскости, удаления ПА от поверхности дна водоема; управления движением НИС с целью формирования оптимальных управляющих воздействий на рули НИС для минимизации отклонений ПА от линии профиля и работой траловой лебёдки для обеспечения заданного удаления ПА от дна. Движение ПА в горизонтальной плоскости относительно профиля представимо выражением вида
где y c(t) − отклонение НИС от заданного профиля, а y ac(t) − отклонение ПА относительно НИС. Уравнения движения ПА в вертикальной плоскости достаточно удовлетворительно описывается выражениями вида
где m − масса ПА, p − плавучесть (плотность) ГА; m x, m z.− составляющие присоединенной массы вытесненной ПА воды по осям OX и OZ; C x, C z − коэффициенты сопротивления воды движению ПА по тем же осям; S Mx; S Mz − площади проекций ПА соответственно в вертикальной и горизонтальной плоскостях; r − плотность воды; v от − скорость НИС относительно воды; W − его водоизмещение; m − масса ПА; g к, g н − угол между путевой скоростью и касательной к КТ в точках его соединения с НИС и ПА соответственно. А так как КТ образует гибкую связь НИС с ГА, то уравнение (5.16.1) следует откорректировать с учетом динамики КТ. Учитывая значительную инерционность системы в целом, уравнения равновесного состояния КТ можно представить в виде
где l = varia − длина КТ, стравленного за борт НИС. Линеаризация уравнений (5.16.1), (5.16.2), (5.16.3) и (5.16.4) приводит к выражениям, описывающим отклонения точек позиционирования и скоростей ПА по горизонтальной (вдоль линии профиля) и вертикальной координатам. Движение ПА в вертикальной плоскости зависит от глубины D h его погружения и скорости движения v от НИС, что показано на рис. 5.16.1
Рис. 5.16.1 Положение ПА на заданном удалении D h 1 от дна водоема достигается путем формирования управляющих воздействий на траловую лебёдку, изменяя длину стравленного за борт КТ, и описывается выражением вида
при Оптимум управления, по результатам моделирования, достигается при D l 0= K P X 1=– R –1 В т РХ 1, где К р − матрица коэффициентов оптимального регулятора состояния траловой лебёдки, а R − решение уравнения Риккати
здесь Q − матрица весовых коэффициентов q i Результаты моделирования процесса управления положением ПА относительно дна, рельеф которого с уклоном до 45○ относительно горизонта, приводят к выражению
Таким образом, задача алгоритмизации процессов управления ГФК в контуре бокового отклонения ПА от заданной траектории состоит в формировании оптимального управления НИС в поперечном направлении (v y), естественно при сохранении v x= const и D h 1= const, но выражения описывающие поведение КТ и v z ПА, представляются дифференциальными уравнениями в частных производных. Исследования на возможность упрощения, линеаризации и разностно-дифференциальной аппроксимации исходных уравнений в частных производных подтвердили допустимость, с достаточной для практических целей, использования линейных дифференциальных уравнений, что позволяет перейти от краевой задачи к задаче Коши для системы обыкновенных дифференциальных уравнений порядка (2 n –2) с постоянными коэффициентами (при разбиении КТ на (n -1) участков). Тогда решение задачи управления ПА в горизонтальной плоскости принимает вид x = AX (t)/ dt + Bv y, где Х − вектор состояния ПА; А − матрица размерности (2 n –2)´(2n–2); В − вектор размерности (2 n –2). Таким образом, решение задачи управления ПА в горизонтальной плоскости реализуемо по функционалу
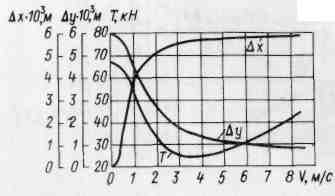
где Q − матрица весовых коэффициентов размерности (2 n –2)´(2 n –2), параметры которой выбираются с учетом требований по допустимому отклонению D y и D z на отрезке времени D t. Функционал J ® max при оптимальном управлении U *º v yc, но U *= – B Т KX, где матрица коэффициентов K оптимальных обратных связей системы управления по вектору X, получаемая решением алгебраического матричного уравнения вида На рис. 5.16.2 приведены кривые зависимости натяжения Т, глубины Δ у и расстояния Δ х между ПА и судном-буксиром от скорости буксировки при фиксированной длине кабель-троса 6000 м. Натяжение Т вточке крепления к судну (у буксирной лебедки) уменьшается с увеличением скорости до 4 м / с и нарастает при дальнейшем увеличении скорости буксировки. При этом ПА с глубины 6 000 м всплывает до 1000 м, но расстояние между аппаратом и судном увеличивается.
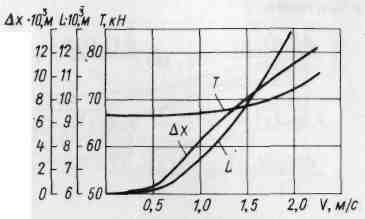
Рис. 5.16.2 Рис. 5.16.3 Здесь показано, как изменяются натяжение Т в точке крепления кабель-троса к судну, длина L кабель-троса и расстояние Δ х между ПА и судном с увеличением скорости буксировки при поддержании постоянной глубины погружения ПА на 6000 м. С ростом скорости буксировки до 2 м / с необходимо увеличить длину кабель-троса до 13000 м. Вид статических конфигураций кабель-троса длиной порядка 6000 м в вертикальной плоскости при скоростях буксировки 0,25; 0,5; 1,0 м / с (кривые 1, 2, 3соответственно) иллюстрируется на рис. 5.16.3. Особенность движения кабель-троса при буксировке ПА заключается в том, что оно происходит с малыми боковыми и вертикальными скоростями по сравнению со скоростью продольного перемещения кабель-троса. Для любой его точки соблюдаются условия V z(t, s)<< V x(t, s); V y(t, s)<< V x(t, s); m z(t, s)<< m x(t, s); m y(t, s)<< m x(t, s). Ho и скорость поступательного продольного движения практически никогда не превосходит 2 м / с. Кроме того, стремятся, чтобы буксировка протекала плавно, без резких силовых воздействий на кабель-трос. При этих условиях допускается раздельный анализ динамики движения кабель-троса в вертикальной (продольное движение) и горизонтальной (боковое движение) плоскостях. Уравнения продольного движения записываются в виде
а бокового
где
Все коэффициенты q i(s) рассчитываются при постоянных значениях гидродинамической скорости V r0, ее касательной составляющей V rm0и неизменном во времени натяжении кабель-троса, определяемого выражением вида
Дифференциальные уравнения (5.16.11) и (5.16.12) в частных производных решаются при начальных m х(0, s); m у(0, s); m z(0, s); V x (0, s); V y (0, s); V z (0, s), а также граничных условиях на нижнем m x(t, L); m y(t, L); m z(t, L)и верхнем концах кабель-троса, причем последние играют роль управляющих воздействий и складываются из соответствующих проекций скорости движения судна-буксира и изменения длины кабеля L в результате работы буксирной лебедки:
Численное решение уравнений динамики кабель-троса может быть получено методом конечных элементов, который позволяет путем дискретизации пространственного аргумента перейти от краевой задачи в частных производных к задаче Коши и системе обыкновенных дифференциальных уравнений. Ниже приводятся некоторые результаты исследований. На рис. 5.16.4 приведены кривые изменения продольной и вертикальной скоростей движения ПА относительно их начальных установившихся значений, а также приращения координат Δ х и Δ у центра масс ПА в результате изменения длины кабель-троса на величину Δ L.
Рис. 5.16.4 Основные параметры движения ПА в вертикальной плоскости демонстрируются на рис. 5.16.5. (Основные параметры движения ПА в плоскости XZ: h – глубина, zТ – удаление ПА от дна, x Т и h-z Т – координаты центра тяжести ПА, R – натяжение кабель-троса в точке О, γ к и γ н углы между касательной к кабель-тросу и осями x и x 1 соответственно). Уравнение движения ПА в плоскости XZ удовлетворяет условиям
и
где учитываются масса m и плавучесть p ПА, составляющие присоединенной массы m x и m z воды по осям OX и OZ, вязкость C x и C z по тем же осям, площади проекций S Mx и S Mz, плотность r воды, скорость v от и водоизмещение W НИС.
Рис. 5.16.5 А так как кабель-трос (КТ) образует гибкую связь и система крайне инерционна (v от£3 узлов), то уравнения равновесного состояния КТ представимы в виде
Положение ПА на заданном удалении D h от дна обеспечивается при выполнении условия
а минимизация колебаний D h – по функционалу
Оптимум управления по результатам моделирования процессом управления положением ПА относительно дна, с учетом регулирования состояния траловой лебедки, достигается при выполнении условия D l 0= K P X 1=– R –1 В т РХ 1, A т1 P + PA 1– PB 1 R –1 B т1+ Q = 0, для рельефа дна с углом наклона до 45°, моделирование управлением описывается выражением dx 1/ dt = (A 1– B 1 K p) x 1+ Q 1 g (t), где учитываются матрица Q 1 параметров модели ПА и функция g (t), характеризующая рельеф дна. Движение ПА в плоскости по координате y учитывает отклонение y c(t) НИС относительно профиля и отклонение y ac(t) ПА относительно НИС
Таким образом, задача алгоритмизации процессов управления ГФК в контуре бокового отклонения ПА от заданной траектории реализуема по функционалу
где Q – матрица параметров, учитывающих требования на допуск D y (t) и D z (t).
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2017-01-23; просмотров: 105; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.14.253.152 (0.021 с.) |

 (g 1D v x2+ g 2D x 2+ g 3D v 2+ g 4D z 2+ R D l 2) dt,
(g 1D v x2+ g 2D x 2+ g 3D v 2+ g 4D z 2+ R D l 2) dt,
 1= А 1 Х 1+ В 1D l и X (0) = X 0, с которым закон изменения D l в функции от D v x, D x, D v z и D z принимает вид функционала, D l =D l 0(D v x, D x, D v z, D z), здесь q i (i =1, …, 4) и R – весовые коэффициенты.
1= А 1 Х 1+ В 1D l и X (0) = X 0, с которым закон изменения D l в функции от D v x, D x, D v z и D z принимает вид функционала, D l =D l 0(D v x, D x, D v z, D z), здесь q i (i =1, …, 4) и R – весовые коэффициенты. (X т QX + v) dt,
(X т QX + v) dt,

 (m y0 ω + k r0 V rmo) ds.
(m y0 ω + k r0 V rmo) ds.


 (g 1D v x2+ g 2D x 2+ g 3D v 2+ g 4D z 2+ R D l 2) dt.
(g 1D v x2+ g 2D x 2+ g 3D v 2+ g 4D z 2+ R D l 2) dt.



