Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Вывод формулы для вычисления вероятности ошибки при регистрации методом стробирования и вычисление вероятности ошибки для заданных а, s, m.Стр 1 из 4Следующая ⇒
Содержание
Введение 1. Методы регистрации__________________________________________ 5 1.1 Теоретические основы________________________________________ 5 1.2 Вывод формулы для вычисления вероятности ошибки при регистрации методом стробирования и вычисление вероятности ошибки для заданных а, s, m____________________________________________ 10 2. Синхронизация в системах ПДС________________________________ 13 2.1 Классификация систем синхронизации__________________________ 13 2.2 Поэлементная синхронизация с добавлением и вычитанием импульсов (принцип действия)_____________________________________________ 13 2.3 Параметры системы синхронизации с добавлением и вычитанием импульсов____________________________________________________ 14 2.4 Расчет параметров системы синхронизации с добавлением и вычитанием импульсов_________________________________________ 17 3. Кодирование в системах ПДС__________________________________ 21 3.1 Классификация кодов__________ 21 Ошибка! Закладка не определена. 3.2 Циклические коды__________________________________________ 23 3.3 Построение кодера и декодера ЦК. Формирование кодовой комбинации ЦК_______________________________________________ 27 Заключение Список используемых источников
Трудно переоценить роль систем передачи дискретных сообщений, которую они играют в нашей жизни. Практически ни одна организация не может функционировать без факсимильной связи, без нее невозможно создание корпоративных компьютерных сетей, которые значительно увеличивают скорость обмена информацией между подразделениями. Техника ПДС обеспечивает лучшее использование высокопроизводительной вычислительной техники. Передача сообщений тесно вошла в нашу жизнь, практически каждый компьютер имеет модем, который является самым распространенным устройством ПДС. Практически на каждом шагу мы встречаемся с необходимостью срочно получить оперативную информацию, в осуществлении этого не последнюю роль играют средства ПДС. Методы регистрации
Теоретические основы
Процесс регистрации посылок состоит в выявлении правильного знака (полярности) принятой посылки даже при наличии в них искажений: как краевых, так и дроблений. Наибольшее распространение получили три способа регистрации: способ стробирования, способ интегрирования и комбинированный способ. Кроме перечисленных способов в последнее время все чаще используется способ регистрации посылок со стиранием, который применяется в системах с обнаружением ошибки на приеме.
1.1.1 Регистрации посылок методом стробирования
Сущность способа регистрации стробированием состоит в том, что накопительный элемент наборного устройства приемника подключается на время, которое значительно меньше длительности элементарной посылки. Момент подключения накопительного элемента к входному устройству часто называют моментом регистрации или временем регистрации. Очевидно, что момент регистрации посылки должен совпадать с приходом из канала связи наиболее устойчивой части посылки. При наличие краевых искажений наиболее вероятным является искажение краев посылок, поэтому наиболее устойчива средняя часть посылки. Именно в момент средней части посылки ее целесообразно регистрировать.
Регистрация методом стробирования может быть реализована на электронных элементах. Схема такого устройства показана на рис.1, а временные диаграммы, поясняющие принцип работы регистрирующего
устройства приведены на рис.2.
1.1.2 Интегральный метод
Сущность интегрального метода регистрации состоит в том, что во время приема на накопительном элементе происходит накопление энергии посылки в течении времени длительности неискаженной посылки то и решение в виде принятого элемента выносится на основе анализа сигнала Uвых, определяемого выражением:
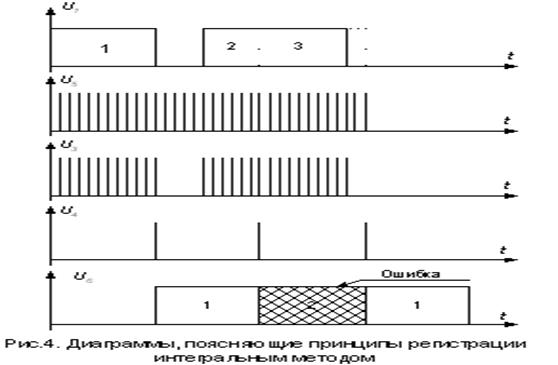
где Uвх(t) - сигнал на входе регистрирующего устройства. Этот сигнал является дискретной функции непрерывного времени. Пусть Uвх(t) принимается на интервале анализа как значения Uвх(t)=0, так как Uвх(t)=1. Тогда решения о приеме «1» должно выноситься, если Uвых³0.5. Очевидно, что ошибка при передаче «1» будет в том случае, когда Uвых<0.5. Интегральный метод часто реализуется на основе многократного стробирования сигнала Uвх(t) в N точках. Схема, поясняющая принцип действия такого устройства регистрации, а также диаграммы, поясняющие принцип регистрации интегральным методом приведены соответственно на рис.3 и рис.4.
Сигнал U1(t) (точка 1) управляет ключом Кл. При открытом ключе, когда Uвх(t)=1, тактовые импульсы U5(t) (стробимпульсы) проходят на вход счетчика Сч. За время действия неискаженной токовой посылки U1(t) (на интервале t0) на выходе Кл. (точка 3) появляется N тактовых импульсов. Если на выходе Кл. на единичном интервале появится 0.5×N+1 и более стробимпульсов, то можно сделать вывод о том, что принята «1». Емкость счетчика достаточно взять равной 0.5×N+1. В конце единичного интервала, определяемого с помощью устройства поэлементной синхронизации, показания счетчика считываются, и он обнуляется.
1.1.3 Комбинированный способ регистрации посылок
Сущность комбинированного способа регистрации состоит в том, что приходящую посылку стробируют в нескольких точках, например в трех. Если в двух или в трех точках регистрации зафиксирован знак «1», то и выходное устройство перейдет в состояние «1». Нетрудно заметить, что при стробировании только в центре посылки комбинированный способ регистрации переходит в регистрацию стробированием и при очень большом количестве проб в интервале длительности посылки то - в интегральный способ регистрации.
1.1.4 Регистрация посылок со стиранием
В рассмотренных выше способах регистрации регистрирующее устройство давало однозначный ответ о том, какой знак посылки принят - «1» или «0». В условиях сильных помех в канале связи могут часто возникать случаи, когда смещение ЗМ превысят предельно допустимую величину или же будут действовать смещения ЗМ и дробления, изменяющие знак принимаемой посылки на интервале времени, превышающем t0/2. В этих случаях при методе регистрации стробированием и интегрированием произойдет неправильная регистрация посылки. Для уменьшения случаев неправильной регистрации используют способ регистрации со стиранием. Если возникает сомнение в правильности принятого знака, то на выход регистрирующего устройства поступает специальный сигнал - стирание. Кодовая комбинация в этом случае в дешифратор не поступает, а стирается. Стертую комбинацию переспрашивают до тех пор, пока она не будет зарегистрирована правильно. Наиболее просто реализовать способ регистрации со стиранием, используя устройства комбинированного способа регистрации. Однако здесь определение знака производится не по большинству, а по обязательному совпадению всех трех проб. Если хотя бы одна из трех проб определила противоположный знак регистрируемой посылки, то посылка (а следовательно, и кодовая комбинация) стирается. Качество приема посылок при этом резко повышается. Разумеется, что повышение качества приема приводит к частым переспросам комбинаций, которые вызывают сомнения, что сопряжено с некоторой потерей пропускной способности.
1.1.5 Сравнение помехоустойчивости способов регистрации
Сравним помехоустойчивость методом стробирования и интегрального при действии краевых искажений. Поскольку при регистрации методом стробирования посылка регистрируется в середине, то допускается смещение любого из ЗМ на величину, не превышающую 0.5t0. При регистрации интегральным методом суммарное смещение границ не должно превышать 0.5t0. Очевидно, что последнее условие выполняется с меньшей вероятностью, то есть Р(и)ош.к>Р(с)ош.к, где Р(и)ош.к, Р(с)ош.к - соответственно вероятности неправильного приема при краевых искажениях и регистрации интегральным методом и методом стробирования. Рассмотрим действия дроблений. Будем считать, что на единичный интервал приходится только одно дробление. Обозначим длительность дробления tдр. Очевидно, что все дробления могут быть подразделены на две группы tдр³t0/2 и tдр<t0/2. Если tдр<t0/2, то при интегральном методе прием будет правильным, так как искажается менее половины ИПТ. Если tдр³t0/2 и при этом искажено более половины ИПТ, то при интегральном методе регистрации будет неправильный прием. Однако поскольку искажено более половины посылки, то будет искажена и ее середина. Следовательно, будет неправильный прием и при регистрации методом стробирования. Таким образом, если при регистрации методом стробирования неправильный прием возможен как в случае, если tдр<t0/2, так и при tдр>t0/2, то при интегральном - только при tдр³t0/2. Поэтому Р(и)ош.д<Р(с)ош.д, где Р(и)ош.д, Р(с)ош.д -соответственно вероятности ошибки при действии дроблений для случаев регистрации интегральным методом и методом стробирования. Вероятность ошибки будет тем больше, чем чаще появляется дробления, а также чем больше средняя длительность дробления и дисперсия длительности дробления.
Импульсов
Рассмотрим основные параметры систем синхронизации: 1. Шаг коррекции jК – выражение в долях единичного элемента смещение фазы тактовых импульсов на выходе делителя при добавлении или исключении одного импульса:
2. Минимальный период корректирования tmin – наименьшее время, в течении которого корректирование не производится. Это время зависит от длительности единичного элемента то и времени усреднения в инерционном элементе (емкости реверсивного счетчика S). При получении информационной последовательности типа 1:1 сигнал на выходе реверсивного счетчика PC появится после получения S импульсов одного и того же знака с выхода ФД. Поэтому:
где В – скорость модуляции, Бод. 3. Погрешность (точность) синхронизации e - величина, характеризующая наибольшее отклонение фазы синхросигналов (ТИ) от их оптимального положения, которое с заданной вероятностью может произойти при работе СС. Погрешность синхронизации рассматривается как сумма двух погрешностей - статической и динамической:
Статическая погрешность eст – выраженное в долях единичного элемента t0 фазовое отклонение ТИ при приеме неискаженной информационной последовательности элементов. Величина eст определяется параметрами СС:
где jк – шаг коррекции; jг – относительное смещение фазы тактовых сигналов из-за нестабильности генераторов передачи и приема за время между сигналами управления. Очевидно, что при передаче комбинации 1:1 промежуток времени между сигналами управления составил t=t0•S, что соответствует tmin. При передаче единичных элементов одного и того же знака промежуток времени между сигналами управления бесконечен. Выражение для eст можно представить в виде:
eст=1/m+6×к×S (2.5)
Динамическая погрешность eдин – выраженное в долях единичного элемента t0 фазовое смещение ТИ, вызванное искажениями элементов информационного сигнала (смещениями ЗМ). Искажения длительности принимаемых элементов могут вызвать появления ложных сигналов управления на выходе ФД, а, следовательно, и на выходе инерционного элемента. Эти сигналы могут осуществить ложное корректирование СС в сторону рассогласования фаз. При нормальном распределении смещений ЗМ входящей последовательности со средним значением, равным нулю, и среднеквадратическим отклонением s0 случайная величина eдин. Также распределена по нормальному закону с дисперсией:
4. Время синхронизации tc – время, необходимое для корректирования первоначального расхождения фаз Dj между ТИ (синхроимпульсами) и входящей последовательностью информационных сигналов. Первоначальное расхождение фаз случайно и может быть лежать в пределах от 0 до ±П (от 0 до ±t0/2). Рассмотрим граничный случай, когда Dj максимален и равен t0/2. При приеме информационной последовательности типа 1:1 и y=1: tcmax=S×m×t0/2. При приеме текста (у=0.5) время синхронизации: tcmax=S×m×t0.
5. Время поддержания синфазности tп.c – время, в течении которого фаза синхросигнала не выйдет за допустимые пределы рассогласования eдоп при прекращении работы СС по подстройке фазы. Подстройка может прекратиться по причине обрыва канала связи или резкого ухудшения его качества, а также в случае долговременного поступления на вход приемника информационных элементов одного и того же знака. Следовательно, время tп.c определяет допустимое время обрыва в канале связи, при котором ранее установленная синфазность сохраняется. Время tп.c может быть определено по формуле:
tп.c=eдоп /2×к×В. (2.8)
Величина eдоп определяется исправляющей способностью приемника m (способностью приемника правильно регистрировать единичные элементы при наличии искажений). Тогда:
tп.c=(m-e)/2×к×В. (2.9)
Увеличение tп.c при заданной скорости модуляции может быть достигнуто уменьшением коэффициента нестабильности задающих генераторов (т.к. величина m определяется схемой аппаратуры ПДИ и способом регистрации элементов и заранее известна).
6. Вероятность срыва синхронизации Рсс – вероятность того, что фаза синхросигналов под действием помех сдвинется на величину, большую |t0/2|. Подобный переход фазы ТИ в соседний элемент полностью нарушает работу синхронной системы связи, т.к. распределители передачи и приема «разойдутся» на элемент, что приведет к нарушению фазирования по циклам. Уменьшить величину Рсс можно увеличением времени усреднения сигналов, поступающих с ФД, т.е. уменьшением емкости реверсивного счетчика S. Это в свою очередь приводит к увеличению времени синхронизации tc и снижению периода корректирования. Поэтому задача снижения Рсс и выбора периода усреднения (емкости S) является вариационной. В результате ее решения необходимо определить оптимальную характеристику того параметра, который наиболее важен в данных условиях.
Вычитанием импульсов
Дано: Решение
т.к. при В=9600 Бод tп.с =20.8<1 мин, следовательно спустя минуту ошибки будут возникать.
Таблица 1 Зависимость tп.с, от В
Задача №2 В СПД используется устройства синхронизации без непосредственного воздействия на частоту задающего генератора. Скорость модуляции равна В. Шаг коррекции должен быть не более Dj. Определить частоту задающего генератора (ЗГ) и число ячеек делителя частоты, если коэффициент деления каждой ячейки равен 2. Значения В и Dj определяются по формулам:
В=1000+10N=1020 Dj=0.01+0.003N=£0.016 dк£Dj fзг-?, n-? Решение
Ответ: n=6; fзг=65.28, кГц
Задача №3 Рассчитать параметры устройства синхронизации без непосредственного воздействия на частоту ЗГ со следующими характеристиками: время синхронизации не более 1с, время поддержания синфазности не менее 10 с, погрешность синхронизации не более 10% единичного интервала t0. Среднеквадратичное значение краевых искажений равно 10%t0, исправляющая способность m=45%, коэффициент нестабильности генераторов K=10’6. Значение В определяется по формуле:
В=(600+ 10N), Бод. Дано: Решение
Т.к.
где eдин=0.037
Ответ: S=25; m=17; fзг=10.5 кГц
Задача №4 Определить реализуемо ли устройство синхронизации без непосредственного воздействия на частоту ЗГ обеспечивающее погрешность синхронизации e=2.5% при условиях предыдущей задачи.
Вывод: т.к. емкость реверсивного счетчика отрицательна, то устройство не реализуемо.
Задача №5 В СПД используется устройство синхронизации без непосредственного воздействия на частоту ЗГ с коэффициентом нестабильности К=0,00001.Коэффициент деления делителя m=10. емкость реверсивного счетчика S=10. Смещение ЗМ подчинено нормальному закону с нулевым математическим ожиданием и СКО равным dкр.и=(15+N/2)% длительности единичного интервала. Рассчитать вероятность ошибки при регистрации элементов методом стробирования без учета и с учетом погрешности синхронизации. Исправляющую способность приемника считать равной 50%.
Дано: Решение
Откуда:
2. Без учета e (e=0):
Ответ: Кодирование в системах ПДС
Классификация кодов Известно большое число помехоустойчивых кодов, которые классифицируются по различным признакам. Помехоустойчивые коды можно разделить на два больших класса: блочные и непрерывные. При блочном кодировании последовательность элементарных сообщений источника разбивается на отрезки и каждому отрезку ставится в соответствие определенная последовательность (блок) кодовых символов, называемая обычно кодовой комбинацией. Множество всех кодовых комбинаций, возможных при данном способе блочного кодирования, и есть блочный код. Длина блока может быть как постоянной, так и переменной. Различают равномерные и неравномерные блочные коды. Помехоустойчивые коды являются, как правило, равномерными. Блочные коды бывают разделимыми и неразделимыми. К разделимым относятся коды, в которых символы по их назначению могут быть разделены на информационные символы, несущие информацию о сообщениях и проверочные. Такие коды обозначаются как (n, k), где n - длина кода, k - число информационных символов. Число комбинаций в коде не превышает 2 ^k. К неразделимым относятся коды, символы которых нельзя разделить по их назначению на информационные и проверочные. Коды с постоянным весом характеризуются тем, что их кодовые комбинации содержат одинаковое число единиц: Примером такого кода является код “3 из 7”, в котором каждая кодовая комбинация содержит три единицы и четыре нуля (стандартных телеграфный код № 3). Коды с постоянным весом позволяют обнаружить все ошибки кратности q=1,...,n за исключением случаев, когда число единиц, перешедших в нули, равно числу нулей, перешедших в единицы. В полностью асимметричных каналах, в которых имеет место только один вид ошибок (преобразование нулей в единицы или единиц в нули), такой код дозволяет обнаружить все ошибки. В симметричных каналах вероятность необнаруженной ошибки можно
 определить как вероятность одновременного искажения одной единицы и одного нуля:
где Pош вероятность искажения символа. Среди разделимых кодов различают линейные и нелинейные. К линейным относятся коды, в которых поразрядная сумма по модулю 2 любых двух кодовых слов также является кодовым словом. Линейный код называется систематическим, если первые k символов его любой кодовой комбинации являются информационными, остальные (n- k) символов — проверочными.
Подклассом линейных кодов являются циклические коды. Они характеризуются тем, что все наборы, образованные циклической перестановкой любой кодовой комбинации, являются также кодовыми комбинациями. Это свойство позволяет в значительной степени упростить кодирующее и декодирующее устройства, особенно при обнаружении ошибок и исправлении одиночной ошибки. Примерами циклических кодов являются коды Хэмминга, коды Боуза - Чоудхури - Хоквингема (БЧХ — коды) и др. Примером нелинейного кода является код Бергера, у которого проверочные символы представляют двоичную запись числа единиц в последовательности информационных символов. Например, таким является код: 00000; 00101; 01001; 01110; 10001; 10110; 11010; 11111. Коды Бергера применяются в асимметричных каналах. В симметричных каналах они обнаруживают все одиночные ошибки и некоторую часть многократных. Непрерывные коды характеризуются тем, что операции кодирования и декодирования производятся над непрерывной последовательностью символов без разбиения ее на блоки. Среди непрерывных, наиболее применимы сверточные коды. Как известно, различают каналы с независимыми и группирующимися ошибками. Соответственно помехоустойчивые коды можно разбить на два класса: исправляющие независимые ошибки и исправляющие пакеты ошибок. Далее будут рассматриваться в основном коды, исправляющие независимые ошибки. Это объясняется тем, что хотя для исправления пакетов ошибок разработано много эффективных кодов, на практике целесообразнее использовать коды, исправляющие независимые ошибки вместе с устройством перемежения символов или декорреляции ошибок. При этом символы кодовой комбинации не передаются друг за другом, перемешиваются с символами других кодовых комбинаций. Если интервал между символами, принадлежащими одной кодовой комбинации, сделать больше чем “память” канала, то ошибки в пределах кодовой комбинации можно считать независимыми, что и позволяет использовать коды, исправляющие независимые ошибки.
Циклические коды Циклические коды относятся к классу линейных систематических. Поэтому для их построения в принципе достаточно знать порождающую матрицу.
 Можно указать другой способ построения циклических кодов, основанный на представлении кодовых комбинаций многочленами b(х) вида:
где bn-1bn-2...bo - кодовая комбинация. Над данными многочленами можно производить все алгебраические действия с учетом того, что сложение здесь осуществляется по модулю 2. Каждый циклический код (n, k) характеризуется так называемым производящим многочленом. Им может быть любой многочлен р(х) степени n-k. Циклические коды характеризуются тем, что многочлены b(x) кодовых комбинаций делятся без остатка на р(х). Поэтому процесс кодирования сводится к отысканию многочлена b(x) по известным многочленам a(х) а р(х), делящегося на р(х), где a(х)- многочлен степени k-1, соответствующий информационной последовательности символов. Очевидно, что в качестве многочлена b(x) можно использовать произведение a(х)р(х). Однако при этом информационные и проверочные символы оказываются перемешанными, что затрудняет процесс декодирования. Поэтому на практике в основном применяется следующий метод нахождения многочлена b(x). Умножим многочлен а(х) на и полученное произведение разделим на р(х). где m(х) - частное, а с(х) - остаток:
Так как операции суммирования и вычитания по модулю 2 совпадают, то выражение перепишем в виде:
Из этой формулы следует, что многочлен Многочлен

В качестве примера приведена схема кодера и декодера для кода (9,5) (см. рис.11) с порождающим многочленом: Код имеет кодовое расстояние d0= 4, что позволяет ему исправлять все однократные ошибки ( За 9 тактов происходит деление принятых комбинаций на образующий полином. После 9 такта в ячейках ФПГ готов остаток, если ошибок нет он нулевой, тогда на выходе схемы «или» будет «0» и при замыкании ключа стирания принятой комбинации не будет. Если в ячейке ФПГ есть хотя бы одна единица, значит, была ошибка, на выходе схемы ФПГ будет «1», которая в момент замыкания ключа поступит на вход R (RESET) и сотрет принимаемую комбинацию. По этому же сдвигу формируется запрос на повторную передачу (ФСОС). Существуют и другие, более универсальные, алгоритмы декодирования. К циклическим кодам относятся коды Хэмминга, которые являются примерами немногих известных совершенных кодов. Они имеют кодовое расстояние d=3 и исправляют все одиночные ошибки. Среди циклических кодов широкое применение нашли коды Боуза- Чоудхури- Хоквингема (БЧХ). Рассмотрим по подробнее понятие синдрома в циклических кодах, а также их свойства. Синдром циклического кода, как в любом систематическом коде, определяется суммой по модулю 2, принятых проверочных элементов и элементов проверочной группы, сформированных их принятых элементов информационной группы В циклическом коде для определения синдрома следует разделить принятую кодовую комбинацию на кодовую комбинацию производящего полинома. Если все элементы приняты правильно, остаток от деления R(x) равен нулю. Наличие ошибок приводит к тому, что R(x)≠0. Следовательно, синдром циклического кода является многочлен R(x). Для определения номеров элементов, в которых произошла ошибка, существует несколько методов. Один из них основан на свойстве, которое заключается в том, что R(x), полученный при делении принятого многочлена H(x) на Pr(x), равен R(x), полученному в результате деления соответствующего многочлена ошибок E(x) на Pr(x). Многочлен ошибок E(x)= H(x)+ А(x), где A(x) – исходный многочлен циклического кода. Так, если ошибка произошла в а1, то при коде (9.5) E1(0,1)=100000000, ошибка а2 соответствует E2(0,1)=010000000 и т.д. Остаток от деления E(0,1) на Pr(0,1)=10011= R1(0,1) для заданного 9 элементного кода всегда одинаков, он не зависит от вида передаваемой комбинации. В рассматриваемом примере R(0,1)=0101. Наличие ошибок в других элементах (а2, а3,…) приведет к другим остаткам. Остатки зависят только вида Pr(x) и n. Для n = 9 и P4(0,1) = 10011 будет следующее соответствие:
Таблица 2 Анализ синдрома
Указанное однозначное соответствие можно использовать для определения места ошибки. Синдром не зависит от переданной кодовой комбинации, но в нем сосредоточена вся информации о наличии ошибок. Обнаружение и исправление ошибок в систематических кодах может быть только на основе анализа синдрома. На основании приведенного свойства существует следующий способ определения места ошибки. Сначала определяют остаток R1(0,1), соответствующий наличию ошибки в старшем разряде. Если ошибка произошла в следующем разряде (более низком), то такой же остаток получится в произведении принятого многочлена и х, т.е. H(x)x. Рассмотрим построение кодовой комбинации циклического кода. Пусть дано: 1.Исходная KK, поступающая от источника А(х), содержит k элементов. 2. Дан производящий полином Pr(x), где r -число проверочных элементов. Задание: сформировать KK ЦК. Формирование KK производится по следующему алгоритму: 1.А(х)умножается на хr. 2. Полученное произведение делим на Рr(х). В результате получим:
3. У множим правую и левую части на Рr(х). В результате:
А(х)×хr=G(х)×Pr(x)+R(x) (суммирование производится по мод. 2) (3.7)
4. Перенесем A(x)×xrв правую часть уравнения, a G(x)×P(x) в левую, в результате:
G(x)×P(x)=A(x)×xr+R(x) (суммирование по мод. 2) (3.8) Левая часть делится на Рr(x) без остатка, а следовательно, должна делится без остатка и правая часть. Существует два способа формирования КК ЦК: 1.Умножение исходной КК наРr(х). Недостатком этого способа является получение неразделимого ЦК, т.е. нельзя выделить отдельно информационные и проверочные элементы. 2. Деление на производящий полином (способ, алгоритм которого описан выше). В этом случае код получается разделимым.
Комбинации ЦК Задача №1 Нарисовать кодер циклического кода, для которого производящий полином задан числом (2×N+1) N=2, тогда 2×2+1=5(10)=101(2) P(x) =101=1×x2+0×x1 +1×x0=x2+1
Рисунок 12 Кодер ЦК для производящего полинома P(x)= x2+1
Задача №2 Записать кодовую комбинацию циклического кода для случая, когда производящий полином имеет вид Р(х)=х3+х+1. Кодовая комбинация, поступающая от источника сообщений имеет К=4 элементов и записывается в двоичном виде как число, соответствующее (N+3). Исходные данные: Р3(х)=х3+х+1 К=4 N=5 Записать кодовую комбинацию циклического кода.
Решение Для начала запишем заданное нам число в из десятичного в двоичный, при чем учтем, что число элементов двоичной последовательности равно 4. 5(10)=0101. Представим это число в виде полинома:
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2017-01-26; просмотров: 480; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.144.202.167 (0.179 с.) |


 (1.1)
(1.1)
 (2.1)
(2.1) (2.2)
(2.2) (2.3)
(2.3) (2.4)
(2.4)
 , e=0 т.к. краевые искажения отсутствуют =>
, e=0 т.к. краевые искажения отсутствуют => 


 ;
;  ;
;  ;
; , Гц
, Гц

 , где
, где  ;
; =>
=>  , тогда:
, тогда:

 , Гц
, Гц

 , где
, где 
 , где
, где  , где:
, где: 

 ;
; 


 , где
, где 
 ;
; 
 ,
, 



 делится на р(х) и, следовательно, является искомым.
делится на р(х) и, следовательно, является искомым. имеет следующую структуру: первые n-k членов низшего порядка равны нулю, а коэффициенты остальных совпадают с соответствующими коэффициентами информационного многочлена а(х). Многочлен с(х) имеет степень меньше n-k. Таким образом, в найденном многочлене b(x) коэффициенты при х в степени n-k и выше совпадают с информационными символами, а коэффициенты при остальных членах, определяемых многочленом с(х), совпадают с проверочными символами. На основе приведенных схем умножения и деления многочленов и строятся кодирующие устройства для циклических кодов.
имеет следующую структуру: первые n-k членов низшего порядка равны нулю, а коэффициенты остальных совпадают с соответствующими коэффициентами информационного многочлена а(х). Многочлен с(х) имеет степень меньше n-k. Таким образом, в найденном многочлене b(x) коэффициенты при х в степени n-k и выше совпадают с информационными символами, а коэффициенты при остальных членах, определяемых многочленом с(х), совпадают с проверочными символами. На основе приведенных схем умножения и деления многочленов и строятся кодирующие устройства для циклических кодов.
 ).
). (3.6)
(3.6)