Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Поверка измерительного канала трм101 в режиме работы с термометром сопротивления.
Цель работы: Изучить устройство прибора типа ТРМ101 и провести поверку измерительного канала ТРМ101 в режиме работы с термометром сопротивления.
Измерение температуры термопреобразователями сопротивления основано на свойстве металлов и полупроводников изменять свое электрическое сопротивление с изменением температуры. Если априорно известна зависимость между электрическим сопротивлением Rt термопреобразователя сопротивления и его температурой t (т. е. К металлическим проводникам термопреобразователей сопротивления предъявляетсярядтребований, основными из которых являются стабильность градуировочной характеристики, а также ее воспроизводимость, обеспечивающая взаимозаменяемость изготовляемых термопреобразователей сопротивления. К числу не основных, но желательных требований относятся: линейность функции Статические характеристики термометров сопротивления представляют линейными выражениями. В некоторых случаях это может привести к значительным систематическим погрешностям в результате измерений. К примеру, выражение для полиномиальной зависимости сопротивления платинового резистора имеет вид:
Линейное приближение этого выражения имеет вид:
Если платиновый резистор при 0ОС имел сопротивление R0=100 Ом, то при 150ОС по полиномиальной зависимости второго порядка это значение равно 157.32 Ом, тогда как линейная аппроксимация позволяет получить значение 155.56 Ом. Разница между этими величинами составляет 1.76 Ом, что эквивалентно ошибке -4.8о при температуре 150ОС. Нелинейность характеристики металлического резистора можно компенсировать противоположной нелинейностью другого резистора, изготовленного из выбранного соответствующим образом металлического материала. Рассмотрим датчик, сопротивление которого выражается соотношением
Присоединим к нему последовательно резистор с сопротивлением Rs(t):
Сопротивление составленного из них двухполюсника равно
Сопротивление будет линейным при условии
При работе с термометрами сопротивления их номинальные статические характеристики представляют в виде:
Wt – значение отношения сопротивления при температуре t к сопротивлению при 0ОС. Зная значение Wt, можно определить температурный коэффициент сопротивления
В зависимости от номинального значения сопротивления при 0ОС (R0) и номинального значения отношения сопротивлений W100условное обозначение номинальной статической характеристики преобразования (НСХ) должно соответствовать указанному в таблице 1:
К примеру, обозначение ТСМ 50М/A/1.426/3/-190+200 указывает, что используется медный термометр сопротивления класса допуска А с номинальным значением сопротивления при 0ОС, равным 50 Ом, и отношением сопротивления при 100 ОС к сопротивлению при 0ОС, равным 1.426; 3 – условное обозначение схемы внутренних соединений. Рабочий диапазон температур – от -190 до +200 ОС. Теоретическая часть Цифровой фильтр 1.1.1 Для корректной работы прибор необходимо защищать от различных внешних воздействий и электромагнитных помех. Для этой цели рекомендуется использовать помехоподавляющий фильтр в цепи питания ТРМ101, а в цепи управления параллельно выходным коммутирующим контактам установить искрогасящие элементы, например RC-цепочку. Кроме аппаратной защиты существует возможность использовать программный цифровой фильтр низких частот. Цифровой фильтр подавляет помехи двух видов. 1.1.2 Во-первых, фильтр устраняет сильные единичные помехи (рис. 1). Если измеренное значение Ti отличается от предыдущего Ti– 1 на величину, большую, чем значение параметра Fв (заданная «полоса фильтра»), то прибор присваивает ему значение равное Ti– 1 + Fв (рис. 1).Таким образом характеристика сглаживается. Как видно из рис. 1, малая ширина полосы фильтра приводит к замедлению реакции прибора на быстрое изменение входной величины. Поэтому при низком уровне помех или при работе с быстроменяющимися процессами рекомендуется увеличить значение полосы фильтра или отключить действие этого параметра. При работе в условиях сильных помех для устранения их влияния на работу прибора необходимо уменьшить значение в параметре «полоса фильтра».
Рис. 1
1.1.3 Во-вторых, фильтр устраняет шумовые составляющие сигнала, осуществляя его экспоненциальное сглаживание. Основной характеристикой экспоненциального фильтра является постоянная времени τф –интервал, в течение которого сигнал достигает 0,63 от значения каждого измерения Ti (рис. 2). 1.1.4 При больших значениях τф фильтр вносит значительное запаздывание, но шумы заметно подавлены (кривая II на рис. 2). При τф близких к нулю фильтр довольно точно отслеживает изменения входного сигнала, но уровень шума практически не уменьшается (кривая I на рис. 2). При установке оптимальных значений параметров фильтра задержка сигнала, вносимая фильтром, не будет оказывать отрицательного влияния на процесс регулирования, при этом сохранится эффективность подавления помех.
Рис. 2 1.1.5 Установка параметров цифрового фильтра Работа цифрового фильтра описана выше. 1.1.5.1 Настройка цифрового фильтра измерений производится путем установки двух параметров 1.1.5.2 Значение фильтрация методом экспоненциального сглаживания отсутствует. Значение 1.1.6.2.3. В результате автонастройки прибор вычисляет оптимальные значения коэффициентов ПИД регулятора (Xp, τи, τд) для данной системы. Кроме того происходит определение постоянной времени входного сглаживающего фильтра τф периода следования управляющих импульсов Т сл и рекомендуемое значение параметра 1.1.6.2.4. После окончания автонастройки светодиод
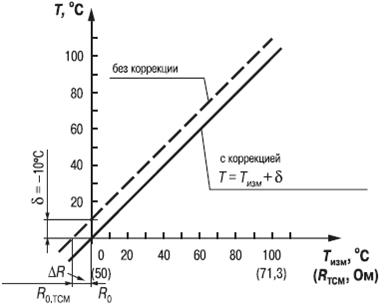
Коррекция измерений 1.2.1 Для устранения начальной погрешности преобразования входных сигналов и погрешностей, вносимых соединительными проводами, измеренное прибором значение может быть откорректировано. В ТРМ101 есть два типа коррекции, позволяющие осуществлять сдвиг или наклон характеристики на заданную величину. 1.2.2 Для компенсации погрешностей Δ R = R 0 – R 0.TCM, вносимых сопротивлением подводящих проводов R TCM, при использовании двухпроводной схемы подключения термопреобразователей сопротивления, к каждому измеренному значению параметра T изм прибавляется заданное пользователем значение δ («сдвиг характеристики датчика»).На рис. 3 приведен пример сдвига характеристики для датчика TCM50M, W100 = 1,426.
1.2.3 Для компенсации погрешностей датчиков при отклонении значения W100 от номинального каждое измеренное значение параметра T изм умножается на заданный пользователем поправочный коэффициент α («наклон характеристики датчика»). Коэффициент задается в пределах от 0,5 до 2,0. На рис. 4 приведен пример изменения наклона характеристики для датчика TCM50M W100 = 1,426.
Рис. 3
Рис. 4
Экспериментальная часть Введение 1.1 Настоящая методика распространяется на микропроцессорные измерители-регуляторы типа ТРМ101 (в дальнейшем по тексту именуемые «приборы» или ТРМ101), предназначенные в комплекте с первичным преобразователем для измерения одного из физических параметров контролируемого объекта и отображения информации об этом параметре в цифровом виде на встроенном цифровом индикаторе. Кроме того, приборы формируют сигналы управления встроенными выходными устройствами, предназначенными для регулирования параметров объекта при эксплуатации. 1.2 Методика устанавливает и определяет порядок и способы проведения первичной, периодической и послеремонтной поверки приборов ТРМ101 в процессе их эксплуатации. 1.3 Номинальные статические характеристики (НСХ) первичных преобразователей, диапазоны измеряемых параметров, разрешающая способность прибора, а также единицы их отображения на цифровом индикаторе ТРМ101 приведены в таблице 1. Таблица 1
1.4 Предел основной приведенной погрешности прибора при измерении входных величин не хуже ±0,5 %. Основная погрешность приводится к разности пределов измерения для первичных преобразователей с соответствующей НСХ. Основные характеристики термометров сопротивления, на которые необходимо опираться при определении его пригодности к работе, указаны в таблице 2:
1.5 Предел основной приведенной погрешности измерительных преобразователей «параметр–ток» не хуже ±0,5 %. Основная погрешность измерительного преобразователя приводится к диапазону выходного сигнала преобразователя. 1.6 Межповерочный интервал приборов ТРМ101 – 2 года.
|
|||||||
|
|
Последнее изменение этой страницы: 2016-12-30; просмотров: 456; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.191.5.239 (0.015 с.) |
 — градуировочная характеристика), то, измерив Rt, можно определить значение температуры среды, в которую он погружен
— градуировочная характеристика), то, измерив Rt, можно определить значение температуры среды, в которую он погружен , большое удельное сопротивление и невысокая стоимость материала. Для изготовления стандартизованных термопреобразователей сопротивления в настоящее время применяют платину и медь.
, большое удельное сопротивление и невысокая стоимость материала. Для изготовления стандартизованных термопреобразователей сопротивления в настоящее время применяют платину и медь.





 , который можно преобразовать к выражению:
, который можно преобразовать к выражению: , где
, где :
:


 – полоса цифрового фильтра и
– полоса цифрового фильтра и  – постоянная времени цифрового фильтра. Оптимальное значение постоянной времени цифрового фильтра
– постоянная времени цифрового фильтра. Оптимальное значение постоянной времени цифрового фильтра  .
. гаснет, прибор автоматически переходит в режим РАБОТА. При сбое в процессе автонастройки ее выполнение сразу прекращается, светодиод
гаснет, прибор автоматически переходит в режим РАБОТА. При сбое в процессе автонастройки ее выполнение сразу прекращается, светодиод