Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Структурная схема системы двигатель - автоматизированное Сцепление и анализ ее устойчивости.
Автоматизированное сцепление - это обычное фрикционное постоянно замкнутое или разомкнутое сцепление с автоматическим приводом управления в зависимости от изменения угловой скорости вращения вала двигателя. Системы автоматического управления сцеплением могут быть: гидравлические, пневматические и вакуумные. Она представляет собой отдельный узел и может устанавливаться на автомобиль как при его сборке, так и в эксплуатации. На рис.6.1 показана блок-схема автоматизированного сцепления. В автоматизированных сцеплениях управление скоростью движения автомобиля осуществляется двумя педалями: топливоподачи и тормоза. Система управления сцеплением для переключения передач объединена с рычагом переключения передач в коробке передач, автоматические сцепления обуславливают конструкцию автомобиля, но полностью устраняют принудительное управление сцеплением водителем. Автоматизированное сцепление можно представить в виде функциональной схемы [5], элементами которой являются двигатель, регулятор, исполнительное устройство и муфта сцепления, соединенные в замкнутый контур автоматического регулирования. Задавшим сигналом является перемещение органа топливоподачи, а выходным параметром -момент трения сцепления. Перемещение органа топливоподачи приводит к появлению избыточного крутящего момента на коленчатом валу. под действием которого увеличивается угловая скорость. Регулятор преобразует изменение угловой скорости вала двигателя в сигнал, воздействующий на исполнительное устройство, которое включает сцепление, стремясь нагрузить двигатель и тем самым остановить рост угловой скорости вала. Таким образом, осуществляется отрицательная обратная связь и регулирование момента трения, но и создается опасность потери устойчивости регулирования и работоспособности сцепления.
Рис.6.1. Блок-схема автоматизированного сцепления. I – Двигатель, 2 - Сцепление, 3 - Рабочий цилиндр управления сцеплением, 4 - Регулятор давления, 5 - Привод от двигателя. Определим условие устойчивости автоматизированного сцепления в простейшем случае моделирования его элементов: а) передаточная функция регулятора давления
Wp = p(s)/w(s) = Kp/(Ts +1) (6.1)
б) передаточная функция исполнительного устройства
Wu = F(s) / p(s) = Ku (6.2)
в) передаточная функция муфты сцепления
W(s) = Wc (s) / F(s) = Kc (6.3)
Здесь и далееu, p, F - соответственно, угловая скорость, давление и усилие, создаваемое исполнительным устройством. Передаточная Функция двигателя Wd может быть полученаизуравнения
Jd(w)/dt + bw = Wd,
где J - момент инерции вращающихся частей и приведенных к ним поступательно - движущихся частей двигателя; b- тангенс угла наклона статической характеристики двигателя W = f(w) к оси w. Тогда
Wd = w(s)/Wd(s) = K / Td + 1 (6.5)
где Кd = 1/b, Td = J/b. Эта передаточная функция соответствует двигателю, имеющему самовыравнивание, т. е. когда b > 0. При b < О двигатель лишен самовыравнивания и в этом случае
Wd = w(s)/ Wd(s) = K / Td - 1(6.5.1)
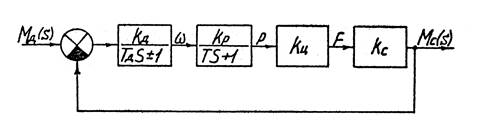
Структурная схема системы "двигатель - автоматизированное сцепление" приведена на рис.6.2. Для анализа устойчивости найдем эквивалентную передаточную функцию системы и приравняем к нулю ее знаменатель, считая, что двигатель лишен самовыравнивания:
Td T S2 + (Td + T)S + Kd Kp Ku Kc = 0
Рис. 6.2 Структурная схема системы "двигатель - автоматизированное сцепление" В соответствии с полученным характеристическимуравнением согласно критерию Гурвица автоматизированное сцепление будет устойчиво, если одновременно выполняются следующие условия:
Td T > 0; Td – T > 0; Kd Kp Ku Kc – 1 > 0
В связи с тем. что Т > 0 и Тd > 0. условие Т Тd > О всегда выполняется. Для автоматизированного сцепления условие Кd Кp Кu Кc - 1 > О такие всегда выполняется как при b < 0, так и при b > 0. Это условие статики регулирования, отражающее необходимость согласования характеристик двигателя и сцепления по моменту. Следовательно, в автоматизированном сцеплении достаточно, чтобы выполнялось условие Тd - Т > 0. Это условие динамики регулирования. Смысл его заключается в том,чторегулятор автоматического сцепления должен быть менее инерционным, чем применяемый двигатель. Обеспечение устойчивости работы автоматизированного сцепления является необходимым условием работоспособности конструкции. Однако для нормальной эксплуатации автоматизированного сцепления этого еще недостаточно. Не менее важным условием работы конструкции является получение приемлемого в эксплуатации переходного процесса включения сцепления M=f(t) при трогании автомобиля с места. Может, например, оказаться, что сцепление работает устойчиво, но переходный процесс носит колебательный характер. При этом низкочастотные колебания момента трения сцепления при трогании автомобиля с места воспринимаются пассажирами как толчки, а высокочастотные (больше 4 Гц) - как вибрации в трансмиссии автомобиля. Наиболее часто плохое качество трогания автомобиля с места объясняется малым запасом устойчивости. Характер переходного процесса зависит от корней характеристического уравнения, определяемого знаменателем передаточной функции.
Если (Td – T)2 > 4Td Т(Kd Kp Ku Kc - 1),то корни характеристического уравнения есть отрицательные действительные числа, и поэтому 'при нулевых начальных условиях переходный процесс будет апериодическим. Таким образом, определены условия работоспособности и качества переходного процесса автоматизированного сцепления. Однако они получены для простой, весьма грубой модели объекта и поэтому страдают лишь общие закономерности выбора параметров. Для проектирования конкретных систем регулирования рассмотрим более строгие модели регулятора давления и исполнительного устройства с муфтой сцепления. Причем, приведенные ниже отдельные модели элементов необходимо рассматривать в составе структурной схемы "двигатель - автоматизированное сцепление".
|
||||||
|
|
Последнее изменение этой страницы: 2016-12-30; просмотров: 522; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.117.183.150 (0.006 с.) |