Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Определение параметров регулятора скорости ⇐ ПредыдущаяСтр 9 из 9
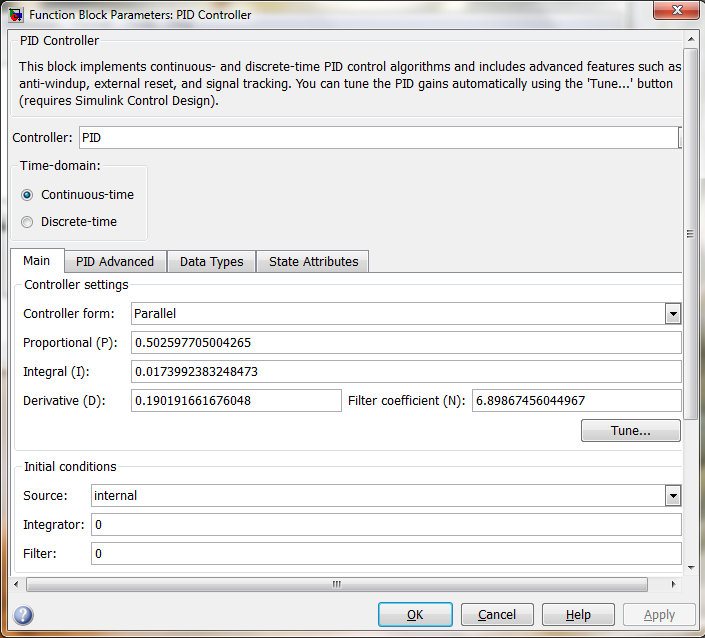
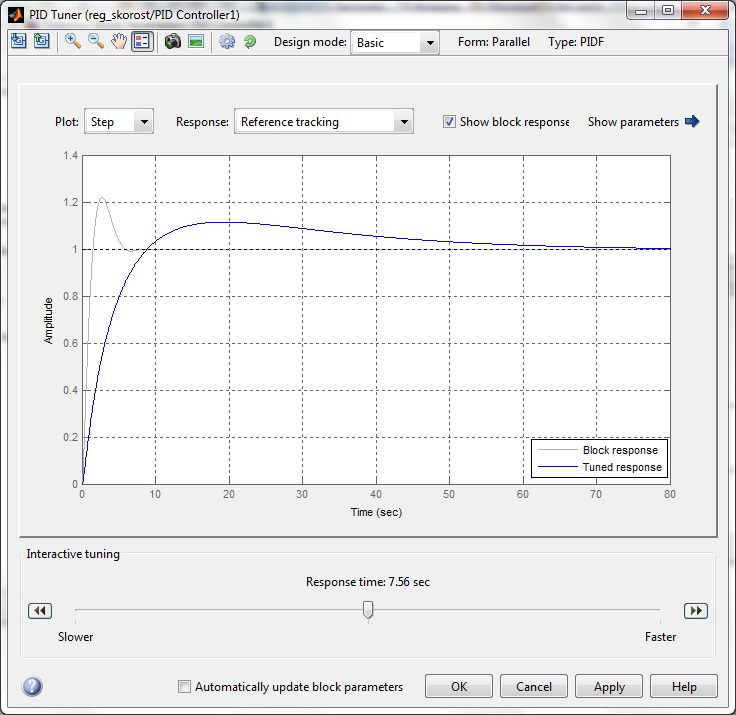
Определение коэффициентов регулятора скорости возможно двумя способами: 1. Расчет параметров регулятора, путем разрыва контура регулирования по единичной обратной связи и приравниванию полученной передаточной функции контура к нормированному виду регулятора. 2. Автоматический подбор коэффициентов, путем выбора формы желаемого переходного процесса. Расчет параметров регулятора будем осуществлять вторым способом. Для этого: 1. Зайдя в меню настроек PID контроллера, нажимаем кнопку «Tune». 2. Ползунками выбираем желаемый вид, а также время переходного процесса. 3. Контроллер автоматически просчитывает коэффициенты, соответствующие: Proportional – коэффициенту усиления регулятора Integral – интегральной составляющей регулятора, Derivative – дифференциальной составляющей регулятора. Окна настроек регулятора скорости приведены на рисунках 25 и 26.
Рис 25. Окно настройки ПИД регулятора
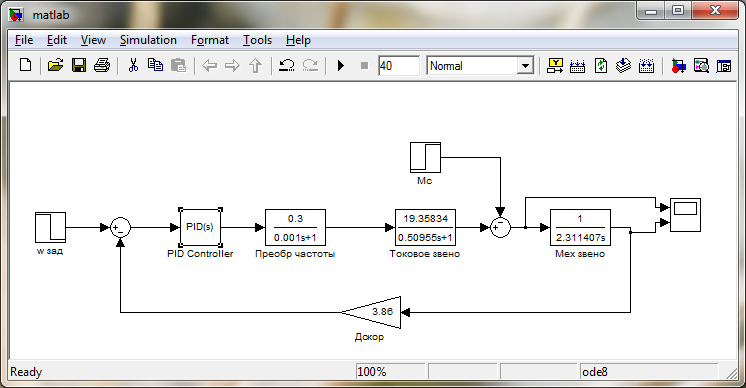
Рис. 26. Графики желаемого и текущего переходного процесса Модель системы автоматического регулирования скорости тележки по транспортировке радиоактивного цементного компаунда в среде Matlab представлена на рисунке 27.
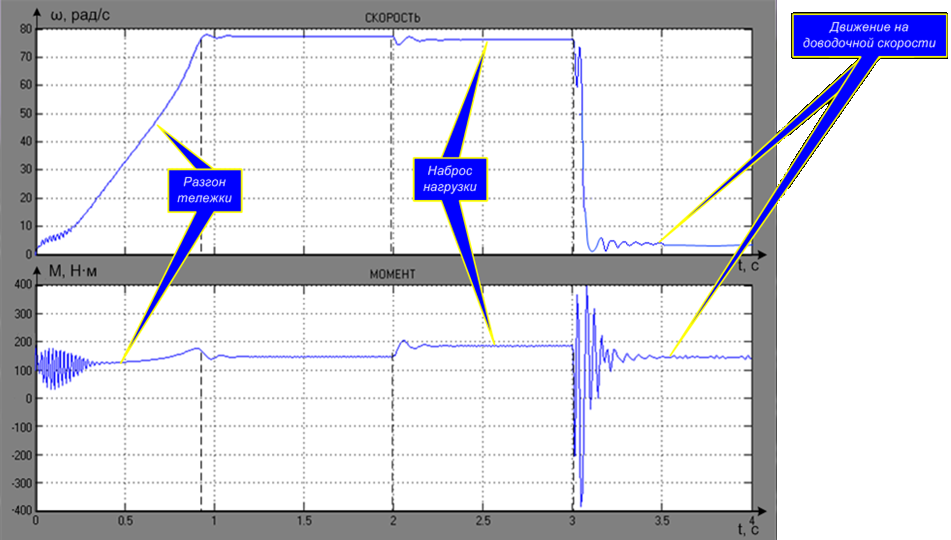
Рис. 27. Модель системы автоматического регулирования скорости Результаты моделирования системы автоматического поддержания скорости перемещения транспортной тележки представлена на рисунке 28.
Рис. 28. Графики переходных процессов системы автоматического регулирования скорости
ЗАключение В дипломном проекте был разработан электропривод тележки по транспортировке радиоактивного цементного компаунда, совершающий движение по заданному циклу. Целью дипломного проекта являлась разработка алгоритма перемещения транспортной тележки системы цементирования комплекса переработки жидких радиоактивных отходов. В ходе расчетов, была уменьшена требуемая мощность двигателя с 7 до 5,5 кВт. Что показывает правильность выбора методов расчета и подходящей аппаратуры для управления электроприводом. На основе технических данных и требований, в результате анализа, был спроектирован цифровой автомат перемещения транспортной тележки. Так же была выполнена реализация алгоритма управления транспортной тележки в виде структурной схемы в среде электротехнического моделирования WorkBench. Как результат, было уменьшено участие человека в производственном процессе, что приводит к увеличению производительности системы цементирования, а так же, исключается «человеческий фактор», т. е. повышается надежность производственного процесса.
|
||||
|
|
Последнее изменение этой страницы: 2016-12-30; просмотров: 161; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.137.195.121 (0.006 с.) |