Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Определить кинематические характеристики и силовое передаточное отношение бесшкворневой подвески на двух поперечных рычагах передней оси легкового автомобиля
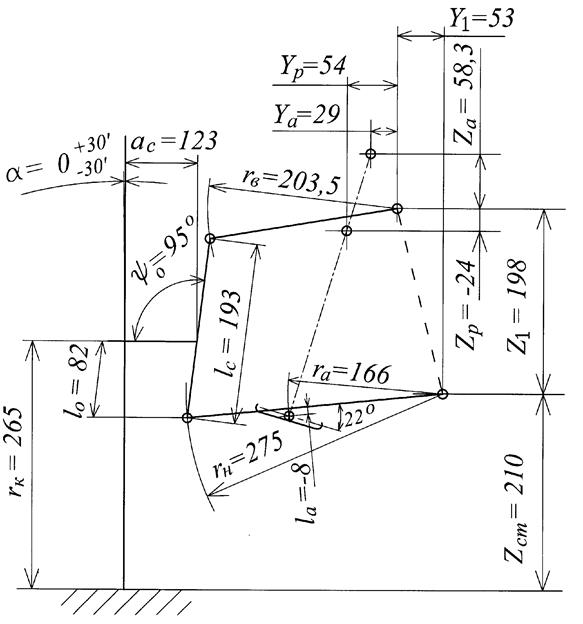
Исходные данные для построения кинематической схемы подвески в исходном состоянии автомобиля при проектной нагрузке 320 кг (4 человека): – радиус колеса, rк = 265 мм; – угол развала для проектной нагрузки α = 0 О – расстояние по горизонтали от вертикальной оси колеса до оси шкворня (стойки), ас = 77 мм; – угол наклона шкворня (стойки), φс = 97 О; – расстояние вдоль шкворня (стойки), от оси вращения колеса до наружного шарнира нижнего рычага, lo = 82 мм; – длина шкворня (стойки), lc = 193 мм; – длина нижнего рычага, rн = 275 мм; – длина верхнего рычага, rв =203,5 мм; – расстояние по вертикали от опорной поверхности до внутреннего шарнира нижнего рычага (для проектной нагрузки), Zст = 210 мм; – расстояние по вертикали от внутреннего шарнира нижнего рычага до внутреннего шарнира верхнего рычага, Z 1 = 198 мм; – расстояние по горизонтали от внутреннего шарнира нижнего рычага до внутреннего шарнира верхнего рычага, Y 1 = 53 мм; – расстояние от внутреннего шарнира нижнего рычага до оси пружины вдоль рычага, rр = 166 мм; – расстояние от внутреннего шарнира нижнего рычага до опоры пружины перпендикулярно рычагу, lp = - 8 мм; – расстояние от внутреннего шарнира нижнего рычага до оси амортизатора перпендикулярно рычагу, rа = 166 мм; – расстояние от внутреннего шарнира нижнего рычага до опоры амортизатора вдоль его оси, lа = - 8 мм; – расстояние по вертикали от внутреннего шарнира верхнего рычага до верхней опоры пружины (+ вверх; - вниз), Zр = - 25 мм; – расстояние по горизонтали от внутреннего шарнира верхнего рычага до верхней опоры пружины (+ в сторону колеса: - от колеса), Yр = 54 мм; – расстояние по вертикали от внутреннего шарнира верхнего рычага до верхней опоры амортизатора (+ вверх; - вниз), Zа = 58,3 мм; – расстояние по горизонтали от внутреннего шарнира верхнего рычага до верхней опоры амортизатора (+ в сторону колеса: - от колеса), Yа = 28,4 мм; – отношение хода отбоя и сжатия, fо / fс = 90/75 мм. Решение По заданным размерам строим кинематическую схему подвески в ее исходном положении. Последовательность построения показана на рисунке 8.1. I. Построение схемы поворотного кулака. Поводим линию опорной поверхности, а – а. На ней выбираем произвольную точку 1 и под углом 90+α, где α – угол развала в статическом положении, проводим вертикальную ось колеса. Из точки 1 проводим дугу радиусом rк и отмечаем положение оси вращения колеса, точка 2. Относительно точки 2 проводим ось вращения колеса, прямую перпендикулярную вертикальной оси колеса. Затем, из точки 2 проводим дугу радиусом ас, где ас – расстояние от вертикальной оси колеса до условной оси шкворня, точка 3. Далее, из точки 3 под углом ψо к оси вращения колеса проводим ось шкворня. Из точки 3 вниз проводим дугу b-b радиусом lо, где lо – расстояние вдоль оси шкворня до наружного шарнира нижнего рычага, точка 4. Из точки 4 вверх проводим дугу радиусом lс, где lс – длина шкворня (стойки). Точка пересечения оси шкворня с дугой c–c (точка 5) соответствует положению наружного шарнира верхнего рычага.
II. Построение схемы положения рычагов. Из точки 4 вправо проводим дугу d-d радиусом rн, где rн, – длина нижнего рычага. Если задан угол наклона нижнего рычага в статическом положении φст откладываем его из точки 4 к горизонтали. На пересечении луча радиуса rн с дугой d-d находим положение внутреннего шарнира нижнего рычага, точка 6.
Если задано расстояние по высоте от опорной поверхности а–а до внутреннего шарнира нижнего рычага Zст положение точки 6 находим на пересечении дуги d-d с горизонтальной прямой, проведенной на расстоянии Zст от опорной поверхности. Соединяем точки 4 и 6. Из точки 6 вверх откладываем расстояние Z 1 (расстояние по вертикали между внутренними шарнирами рычагов на кузове) и проводим горизонтальную прямую e-e. Из точки 5 проводим дугу g-g радиусом rв. На пересечении прямой e-e с дугой g-g находим положение внутреннего шарнира верхнего рычага, точка 7. Соединяем точки 5 и 7. III. Построение схемы положения оси пружины и амортизатора. Из точки 6 влево проводим дугу f-f радиусом rр(а), где rр(а), – расстояние от внутреннего шарнира нижнего рычага до оси пружины (амортизатора) вдоль рычага. Из точки пересечения дуги f-f с нижним рычагом откладываем перпендикулярно ему расстояние lp(а), где lp(а) – расстояние от нижнего рычага до оси опоры пружины (амортизатора). Точка 8 – положениеоси нижней опоры пружины (нижнего шарнира амортизатора).
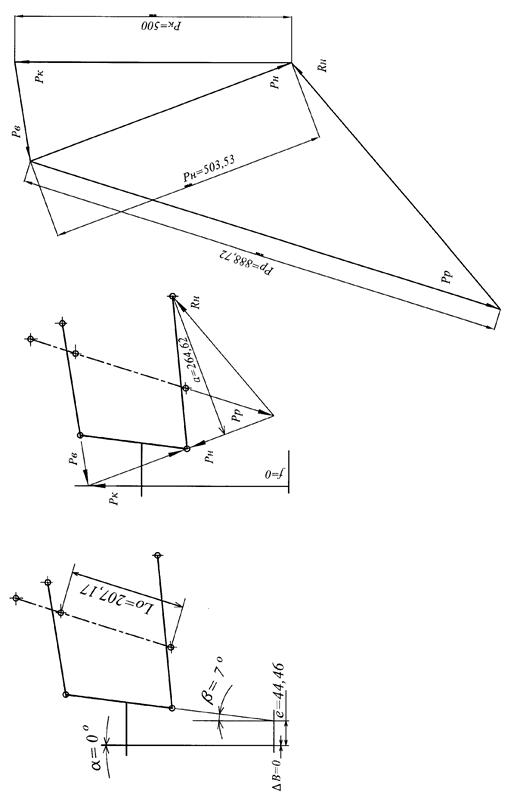
Из точки 7 откладываем расстояния Zр и Zа (Zр - расстояние по вертикали от внутреннего шарнира верхнего рычага до оси верхней опоры пружины; Zа – до верхнего шарнира амортизатора). Далее из точки 7 откладываем расстояния Yр и Yа (Yр - расстояние по горизонтали от внутреннего шарнира верхнего рычага до оси верхней опоры пружины; Yа – до верхнего шарнира амортизатора). Получаем координаты центра верхней опоры пружины, точка 9 и центра верхнего шарнира амортизатора, точка 10. Соединяем точку 8 с точками 9 и 10. Кинематическая схема подвески для статического положения кузова при проектной нагрузке показана на рисунке 8.2. Схема замера кинематических параметров подвески и построение силовых треугольников для определения силового передаточного отношения в статическом положении показана на рисунке 8.3. Построение выполнено в графической среде AutoCAD.
Рис. 8.2. Кинематическая схема подвески для статического положения кузова при проектной нагрузке
Непосредственно при помощи замеров получены следующие значения параметров: – угол развала, αо = 0 О; – изменение колеи, ΔВo = 0 мм; – угол наклона шкворня, βо = 7 О; – плечо обката, ео = 44,5 мм; – высота пружины, Lо = 207,2 мм.
Построение силовых треугольников осуществляем в следующей последовательности. I. Рассматриваем равновесие поворотного кулака. На ось колеса действует усилие Рк, направленной перпендикулярно опорной поверхности. На верхний шарнир шкворня действует усилие Рв, направленное вдоль оси верхнего рычага. (Верхний рычаг воспринимает нагрузку только от поворотного кулака и в шарнире ее направление совпадает с осью наклона рычага). На нижний шарнир шкворня действует усилие Рн. Для определения его направления проводим прямую, перпендикулярную опорной поверхности (направление силы Рк). Продолжаем длину верхнего рычага по направлении к поворотному кулаку (направление силы Рв). Из точки пересечения этих сил проводим прямую, проходящую через нижний шарнир шкворня (направление силы Рн). II. Рассматриваем равновесие нижнего рычага. На нижний рычаг подвески со стороны поворотного кулака действует усилие Рн. Кроме того, на нижний рычаг опирается пружина. Усилие от пружины Рр направлено вдоль ее оси. Со стороны кузова на рычаг действует реакция Rн. Для определения ее направления находим точку пересечения сил Рн и Рр, которую соединяем с центром внутреннего шарнира нижнего рычага. III. Построение силовых треугольников. Откладываем вертикальный отрезок произвольной длины, в нашем примере 500 мм (направление силы Рк). К его вершине проводим отрезок параллельный направлению силы, действующей на верхний рычаг Рв, а к его основанию проводим отрезок параллельный направлению силы, действующей на нижний рычаг со стороны поворотного кулака Рн. Находим точку пересечения отрезка направления силы Рв с отрезком направления силы Рн. Длины полученных отрезков определяют относительные усилия на верхний и нижний шарниры шкворня.
Усилие на нижний шарнир Рн раскладываем на две составляющие. К его вершине проводим отрезок параллельный направлению силы, действующей на нижний рычаг со стороны пружины Рр, а к его основанию отрезок параллельный направлению реакции, действующей на внутренний шарнир нижнего рычага Rн. Длина полученных отрезков определят относительные усилия от рессоры и реакции на внутренний шарнир нижнего рычага. Силовое передаточное отношение подвески определяется как Для получения характеристик изменения кинематических параметров и силового передаточного отношения перестраиваем схему подвески для различных положений колеса относительно кузова. Последовательность такого перестроения показана на рисунке 8.4. I. Из центра внутреннего шарнира верхнего рычага (точка 7) проводим дугу m-m, проходящую через центр наружного шарнира (верхнего шарнира шкворня), точку 5. Аналогично из центра внутреннего шарнира нижнего рычага (точка 6) проводим дугу n-n, проходящую через центр нижнего шарнира шкворня, точку 4. Разбиваем дугу n-n на произвольное число, в пределах угла поворота нижнего рычага, и отмечаем выбранную точку 4’. Копируем поворотный кулак с вертикальной осью колеса, перемещая точку 4 в положение 4’. II. Поворачиваем поворотный кулак с вертикальной осью колеса относительно точки 4’ до касания центра верхнего шарнира шкворня с дугой m-m, отмечаем точку 5’. III. Строим новое положение рычагов подвески. Соединяем точку 5’ с центром внутреннего шарнира верхнего рычага 7, а точку 4’ с центром внутреннего шарнира нижнего рычага 6. Далее из точки 6 проводим дугу f-f радиусом rр(а) на которой откладываем отрезок lр(а) и находим новое положение центра оси нижней опоры пружины (нижнего шарнира амортизатора), точка 8’. Проводим ось пружины, соединяя точки 9 и 8’.
Рис. 8.4. Последовательность перестроения схемы подвески
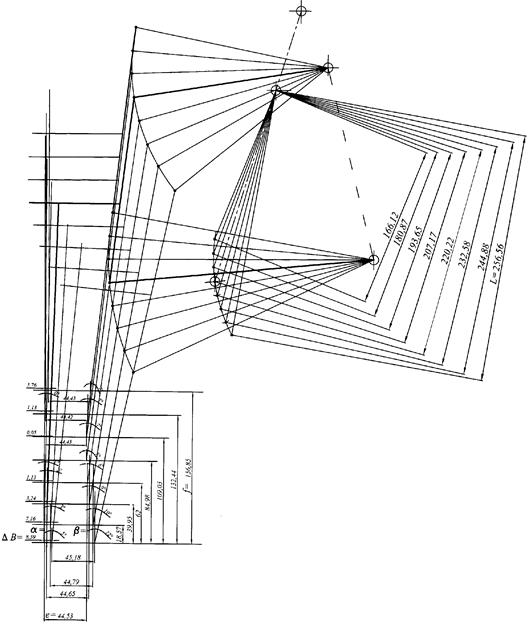
Определение кинематических параметров подвески графическим методом для различных положений колеса показано на рисунке 8.5.
Рис. 8.5. Определение кинематических характеристик графическим методом
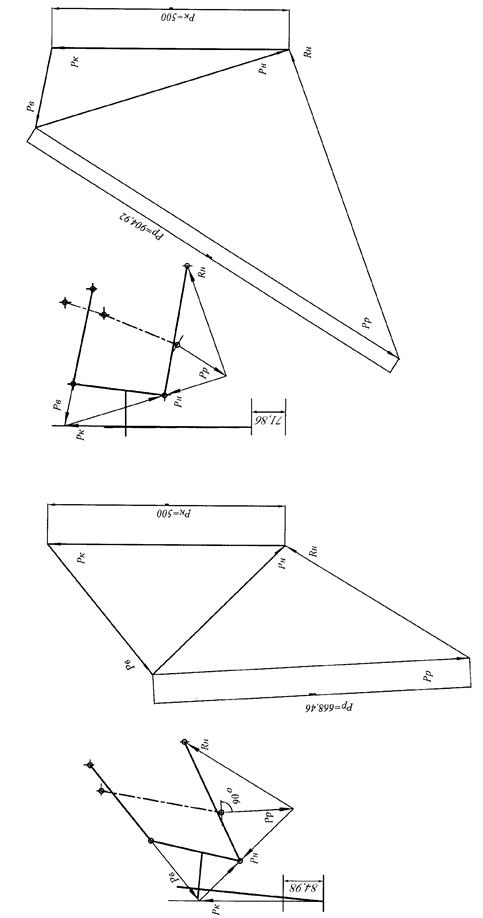
Методом силовых треугольников определяем передаточное отношение подвески для промежуточных положений колеса относительно кузова. Построение силовых треугольников для крайних положений колеса при ходе отбоя и сжатия приведено на рисунке 8.6.
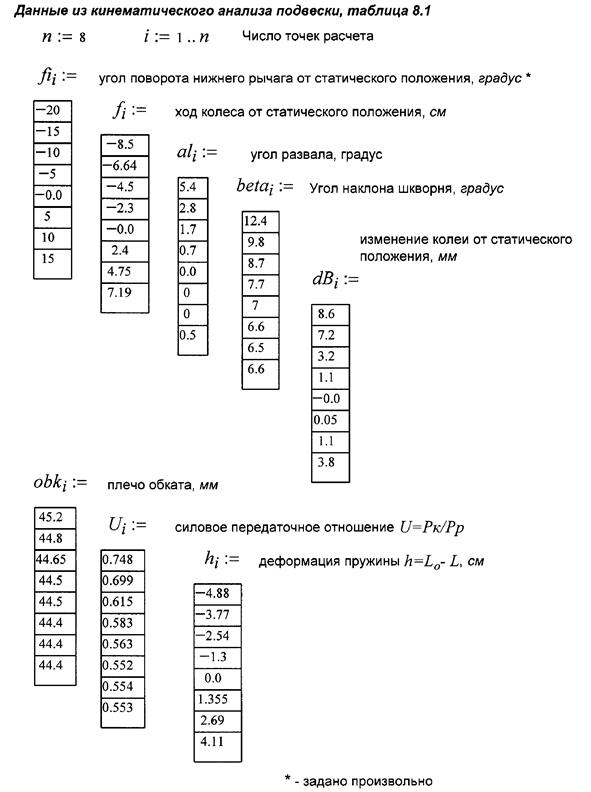
Полученные результаты замеров заносим в таблицу 8.1
Таблица 8.1 Кинематические и силовые характеристики подвески
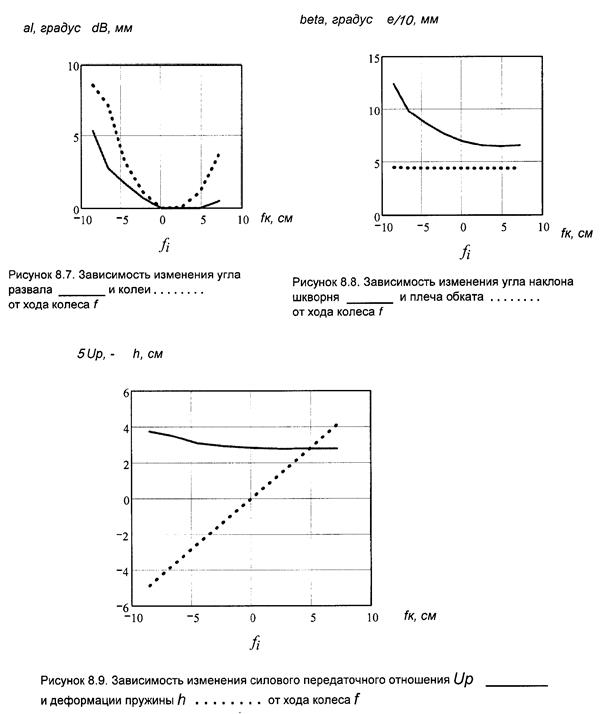
Расчетом определяем деформацию пружины (ход штока амортизатора) относительно статического положения hp = Lp.o - Lp. Здесь Lp.o = 207,2 мм – высота пружины под статической нагрузкой. Lp – текущая высота пружины. Силовое передаточное отношение подвески По данным таблицы 8.1 в среде Mathcad построены графики изменения кинематических и силовых характеристик подвески, рисунки 8.7, 8.8 и 8.9.
ЗАДАЧА 8.2
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-12-16; просмотров: 399; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.117.183.150 (0.03 с.) |
 30 ’;
30 ’;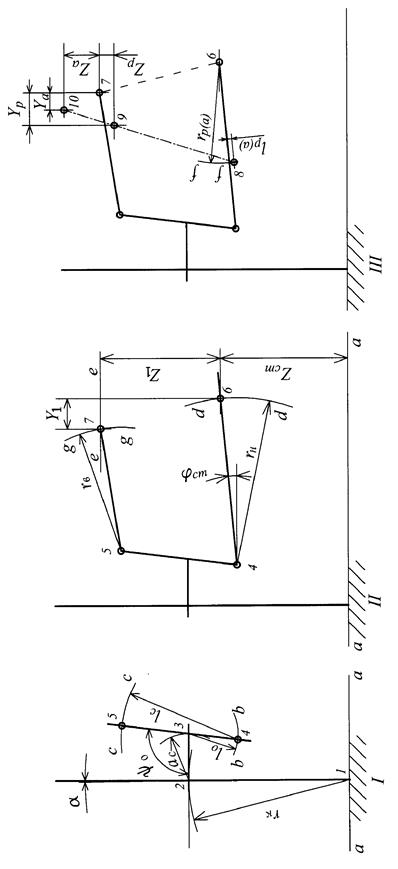
 , где
, где  - длина вектора усилия на колесо;
- длина вектора усилия на колесо;  - относительная длина вектора усилия от рессоры. Для статического положения
- относительная длина вектора усилия от рессоры. Для статического положения  . Здесь
. Здесь  мм – (длина задана произвольно);
мм – (длина задана произвольно);  мм - относительная длина вектора усилия от пружины, замеренная на силовых треугольниках.
мм - относительная длина вектора усилия от пружины, замеренная на силовых треугольниках.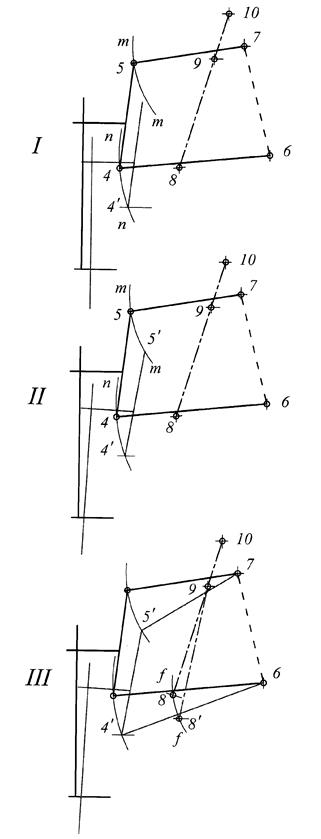
 α, о
α, о
 , мм
, мм
 , где
, где