
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Исполнительные электродвигатели переменного тока
Для уменьшения инерционности, повышения быстродействия и точности работы асинхронные исполнительные двигатели изготовляют с полым немагнитным ротором (рис. 12.15). В отличие от двигателя с короткозамнутой обмоткой, ротор этого типа обмотки не имеет, а изготовлен из алюминия или его сплава в виде тонкостенного стакана 1, который посредством втулки 6 укреплен на валу 5. Неподвижный магнитопровод собирают из листов электротехнической стали, но в данной конструкции он состоит из двух частей: внутренней 4 и внешней 2 (с обмоткой 3). В воздушный зазор между ними входят стенки полого ротора. Исполнительные электродвигатели такого типа изготовляют мощностью от десятых долей ватта до нескольких сотен ватт в расчете на промышленную частоту 50 Гц и повышенные частоты от 400 до 1000 Гц. Основной недостаток их обусловлен значительной величиной немагнитного зазора между внутренней и внешней частями статора (0,4-1,5мм, включая толщину стенки ротора 0,1-0,25 мм). В связи с этим двигатель с полым немагнитным ротором имеет большой намагничивающий ток (0,8-0,9 от номинального тока), низкий коэффициент мощности и относительно небольшой к.п.д.
Характер работы многих автоматических устройств требует применения привода дискретного (прерывистого) действия. В этих случаях используют шаговые электродвигатели, ротор которых поворачивается на фиксированный угол (делает один шаг) под действием управляющего импульса. В ответ на серию импульсов ротор делает серию шагов, число которых равно числу управляющих импульсов. Такой характер действия шаговых двигателей позволяет применятьих в устройствах с числовым программным управлением (например, промышленные роботы, металлообрабатывающие станки), а также в механизмах типа счетчика импульсов, лентопротяжек и т. п. На рис. 12.16 показана схема шагового двигателя с тремя явно выраженными полюсами на статоре, обмотки которого соединены звездой и получают питание по линии из трех проводов, один из которых имеет полярность, противоположную полярности двух других.
Общие сведения об электромеханических промежуточных элементах автоматики
В структурной схеме системы автоматики промежуточные элементы занимают положение между чувствительными и исполнительными элементами. К промежуточным элементам относятся: стабилизаторы напряжения и тока, реле, распределители, усилители, управляющие (программные) устройства, генераторы импульсов, каналы связи и многие другие.
Реле При определенных значениях входной величины х выходная величина у изменяется скачком (график на рис. 12.17, а). Изменение выходной величины от у1 до у2 при х = х2 называют срабатыванием, а изменение от у2 до у1 при х = х1 — отпусканием реле. От рода входной величины различают реле электрические, тепловые, фотореле и др. Наиболее многочисленна группа электромеханических реле, в которых изменение электрической величины (тока, напряжения, мощности) вызывает механическое перемещение подвижного элемента, в результате чего переключаются электрические контакты. В группу электромеханических входят электромагнитные, магнитоэлектрические, электродинами-ческие, индукционные и другие реле, а из них чаще можно встретить реле электромагнитные. На рис. 12.17, б показана конструктивная схема электромагнитного реле клапанного типа, где отмечены части стального магнитопровода (1 — сердечник, 2 — катушка электромагнита; 3 — ярмо; 4 — изоляционное основание; 5 — контакты; 6 — подвижный якорь).
Рис. 12.17
При отсутствии тока в катушке якорь под действием пружины (в данном реле ее роль выполняют пружинящие контактные пластины) или собственного веса находится в наибольшем удалении от сердечника. В результате включения тока в катушку якорь притягивается к сердечнику и происходит переключение контактов: одни из них (нормально разомкнутые) замыкаются, а другие (нормально замкнутые) размыкаются. Такое реле называют нейтральным, так как его работа не зависит от направления тока в катушке. В некоторых случаях переключение в управляемой электрической цепи является конечной задачей автоматического устройства, и реле в таких случаях может играть роль исполнительного элемента. Примером тому является работа электромагнитного контактора, который по принципу действия не отличается от электромагнитного реле (на рис. 10.17, в детали контактора обозначены так же, как у реле).
Электротермические реле Из группы электротермических (тепловых) реле чаще других применяют биметаллические реле, принцип действия которых поясняет рис. 12.18.
Для устранения влияния температуры окружающей среды иногда контакт 3 также крепится на биметаллической пластинке 4. Реле этого типа имеет значительную тепловую инерцию, вследствие чего контакты движутся медленно и работа их этим осложняется. Для облегчения работы контактов применяют приспособления, которые при достижении определенной температуры заставляют контакты скачком менять положение или помещают биметаллические пластины с контактами в вакуум, что значительно усложняет реле. Тепловая инерция полезна при применении биметаллических реле для защиты электродвигателей от перегрузок, дает сигнал на отключение двигателя.
Шаговые распределители В автоматике, вычислительной технике, телефонии применяют распределители, с помощью которых осуществляется поочередное переключение в измерительных или исполнительных цепях. Как можно решить подобную задачу, дает представление схема на рис. 12.19, а. Подвижная щетка 6 поочередно соединяет входной зажим с одним из выходных зажимов (0, 1, 2, …) и, таким образом, распределяет, например, управляющие сигналы. Возможно и обратное поступление сигналов от контролируемых объектов, которые поочередно подключаются к одному приемнику.
Рис. 12.19
Конструктивная схема электромеханического шагового распределителя показана на рис. 12.19, б, где видны контактная система (набор неподвижных контактных ламелей 0, 1, 2,.... 24, 25, подвижные щетки 6) и электромагнитный привод (электромагнит и храповой механизм). Контактные ламели расположены по дуге окружности (180 или 120°) в несколько рядов (от четырех до восьми), и на каждый ряд имеется своя щетка, которая состоит из двух пружинящих пластин, соприкасающихся с ламелью с двух сторон для надежности контакта. Щетки по контактному полю перемещаются шагами, причем каждый шаг совершается непосредственно под действием пружины 8 посредством движущей собачки 5, которая доходит до упора 4 и поворачивает на один шаг храповое колесо 3, укрепленное на одной оси со щетками. При подаче в обмотку 10 электромагнита очередного управляющего импульса якорь 9 притягивается к сердечнику, натягивает пружину и передвигает движущую собачку обратно на один зуб, при этом стопорная собачка 7 удерживает храповое колесо и щетки в фиксированном положении. По окончании управляющего импульса подвижная система распределителя делает очередной шаг. С последним шагом щетка сходит с последней ламели, но одновременно противоположный конец щетки замыкается с первой рабочей ламелью. Этим исключается холостой пробег подвижной части распределителя.
Сельсины
Такие передачи осуществляют в большинстве случаев с помощью однофазных сельсинов — малых индукционных электрических машин. В передаче используются два одинаковых сельсина (датчик и приемник), которые соединены между собой линией связи. Схема синхронной связи на однофазных сельсинах представлена на рис. 12.20. Сельсин в данном случае имеет однофазную обмотку на статоре (обмотка возбуждения 0В) и трехфазную обмотку на роторе (синхронизирующая обмотка ОС). Обмотки возбуждения обоих сельсинов включены в общую сеть переменного тока, обмотки синхронизации соединены между собой трехпроводной линией связи. Если фазы обмоток ротора обоих сельсинов расположены одинаково относительно своих обмоток возбуждения, то в соответствующих фазах сельсина-датчика и сельсина-приемника, соединенных проводом линии, индуктируются одинаковые по величине встречно направленные э.д.с. В этом случае тока в обмотках синхронизации нет и положение роторов датчика и приемника называют согласованным. При повороте ротора сельсина-датчика на некоторый угол α равновесие э.д.с. в одноименных фазах датчика и приемника нарушается и тогда в обмотках и проводах линии связи появляются уравнительные токи. На токи в обмотках ротора действует магнитное поле статора, в результате чего возникает вращающий (синхронизирующий) момент, который поворачивает ротор сельсина-приемника на угол β, т. е. в положение, согласованное с ротором сельсина-датчика. Если сельсин-приемник на своем валу практически не имеет механической нагрузки (например, на валу укреплена только стрелка указателя поворота), то такой режим называется индикаторным. При наличии механической нагрузки точность работы передачи значительно понижается, поэтому применяют трансформаторную схему, в которой в сеть включена только обмотка возбуждения сельсина-датчика, а такаяже обмотка сельсина-приемника является выходной. Напряжение от зажимов этой обмотки подается на усилитель, а далее на обмотку управления исполнительного двигателя, вал которого механически связан с валом сельсина-приемника. Исполнительный двигатель поворачивает ротор сельсина-приемника на угол β до согласованного положения сельсинов и останавливается при α = β, если система работает в режиме ограниченного поворота.
Электрическая связь вращающихся обмоток сельсинов с неподвижными проводами линии осуществляется через скользящие контакты (кольца и щетки), поэтому такие сельсины называют контактными. Наличие скользящих контактов ухудшает технические характеристики сельсинов, поэтому широкое применение получают бесконтактные сельсины, отличительной особенностью которых является расположение обмоток возбуждения и синхронизации на статоре, а на роторе, имеющем явно выраженные полюса, обмотки нет.
|
||||||||
|
|
Последнее изменение этой страницы: 2016-08-26; просмотров: 224; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.216.32.116 (0.011 с.) |
 В автоматике наибольшее применение имеют асинхронные двухфазные электродвигатели с короткозамкнутым ротором и полым ротором. На статоре двигателя расположены две обмотки, сдвинутые в пространстве на 90°.
В автоматике наибольшее применение имеют асинхронные двухфазные электродвигатели с короткозамкнутым ротором и полым ротором. На статоре двигателя расположены две обмотки, сдвинутые в пространстве на 90°. Шаговые электродвигатели
Шаговые электродвигатели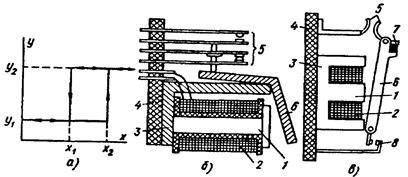
 Биметаллическая пластинка 1 — это две прочно скрепленные сваркой или пайкой полосы из металлов с резко различными коэффициентами теплового расширения, например латуни и инвара (сплав железа с никелем). Такая пластинка при нагревании изгибается и контакты 2, 3 замыкаются, при охлаждении она снова выпрямляется, а контакты размыкаются. Биметаллическая пластинка нагревается тем больше и быстрее, чем больше электрический ток в нагревателе (обмотка 5).
Биметаллическая пластинка 1 — это две прочно скрепленные сваркой или пайкой полосы из металлов с резко различными коэффициентами теплового расширения, например латуни и инвара (сплав железа с никелем). Такая пластинка при нагревании изгибается и контакты 2, 3 замыкаются, при охлаждении она снова выпрямляется, а контакты размыкаются. Биметаллическая пластинка нагревается тем больше и быстрее, чем больше электрический ток в нагревателе (обмотка 5).
 В различных технических устройствах применяют дистанционные передачи угловых перемещений, причем оси, не связанные между собой механически, поворачиваются синхронно.
В различных технических устройствах применяют дистанционные передачи угловых перемещений, причем оси, не связанные между собой механически, поворачиваются синхронно.


