
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Автоматическое регулирование
Для примера рассмотрим в качестве объекта управления тот же резервуар с жидкостью, при условии, что уровень ее не должен выходить за пределы верхней h2 и нижней h1 отметок. Оператор должен наблюдать за показаниями измерителя уровня и при обусловленных уровнях направлять команду на закрытие или открытие крана 5 (рис. 12.1). Утомительную обязанность оператора по наблюдению и регулированию уровня можно возложить на автоматическое устройство, которое имеет структурную схему рис. 12.2, в. Измерительный преобразователь ИП измеряет регулируемую величину (в данном случае уровень жидкости в резервуаре) и преобразует ее в величину другого вида, более удобную для воздействия на управляющий орган УО. Управляющий орган воспринимает это воздействие и срабатывает при достижении одного из заданных значений регулируемой величины, т. е. дает команду на работу исполнительного органа ИО, который, в свою очередь, воздействует нужным образом на объект регулирования ОР. Если разность между верхним и нижним пределами регулируемой величины (в примере с регулятором уровня жидкости Dh = h2 - h1) сокращать, то можно представить себе систему, которая поддерживает с определенной точностью одно заданное значение регулируемой величины (уровня жидкости, скорости вращения вала или других величин). Рассмотренная автоматическая система объединяет в себе функции контроля и управления, в ней осуществляется замкнутая цепь воздействий: объект управления — измерительный преобразователь — управляющий орган — исполнительный орган, который воздействует снова на объект управления. Такую замкнутую систему автоматического управления называют системой автоматического регулирования. Автоматические системы состоят из отдельных взаимосвязанных элементов, которые по назначению можно делить на три группы: чувствительные, исполнительные, промежуточные. Общие сведения об измерительных параметрических преобразователях
По характеру выходной величины измерительные преобразователи делят только на два типа: параметрические, генераторные. Измерительный преобразователь называют параметрическим, если он изменение контролируемой неэлектрической величины преобразует в изменение электрической величины, являющейся параметров электрических цепей, т. е. в изменение сопротивления R, индуктивности L или емкости С. Соответственно параметрический преобразователь называют резистивным, индуктивным или емкостным.
Резистивные преобразователи К этой группе относятся контактные, реостатные, тензометрические преобразователи, а также терморезисторы. Контактный преобразователь (рис. 12.3) состоит из подвижного измерительного штифта 1 и контактов 2, 3, 4, один из которых (3) прикреплен к штифту и перемещается вместе с ним.
Реостатный преобразователь Реостатный преобразователь (рис. 12.4) по принципу действия подобен обычному реостату с движком, но отличается малыми размерами, тщательным и точным исполнением. Размеры его тем меньше, чем меньше мощность объекта, с которым он связан.
Входная величина — угловое α или линейное х перемещение — передается движку, с изменением положения которого изменяется выходная величина — сопротивление реостата.
Реостатные преобразователи применяют для измерения углов поворота, дистанционной передачи показаний различных приборов, измерения уровня жидкости (см. рис. 12.1), перемещения деталей, усилий, давления и других величин, которые можно преобразовать в перемещение.
|
||||||
|
|
Последнее изменение этой страницы: 2016-08-26; просмотров: 93; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.143.228.40 (0.005 с.) |
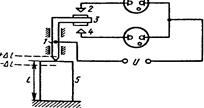 В данном случае механическое перемещение штока преобразуется в электрический сигнал, обусловленный замыканием или размыканием контактов. При этом выходная величина преобразователя — сопротивление между контактами изменяется в пределах от бесконечности практически до нуля. Подобные преобразователи применяют для контроля размеров деталей, в сортировочных автоматах. На рис. 12.3 показана схема для сортировки деталей по размерам. Если размер детали 5 наводится в пределах допустимых отклонений, то оба контакта разомкнуты, неоновые лампы не зажигаются, что означает годность детали. Когда под штифт попадает деталь, размер которой выходит за пределы допуска в ту или другую сторону (отклонение ³ ± D l, чему соответствует расстояние между подвижным и неподвижными контактами, то однаизламп загорается и сигнализирует о браке детали. Рис. 12.3
В данном случае механическое перемещение штока преобразуется в электрический сигнал, обусловленный замыканием или размыканием контактов. При этом выходная величина преобразователя — сопротивление между контактами изменяется в пределах от бесконечности практически до нуля. Подобные преобразователи применяют для контроля размеров деталей, в сортировочных автоматах. На рис. 12.3 показана схема для сортировки деталей по размерам. Если размер детали 5 наводится в пределах допустимых отклонений, то оба контакта разомкнуты, неоновые лампы не зажигаются, что означает годность детали. Когда под штифт попадает деталь, размер которой выходит за пределы допуска в ту или другую сторону (отклонение ³ ± D l, чему соответствует расстояние между подвижным и неподвижными контактами, то однаизламп загорается и сигнализирует о браке детали. Рис. 12.3 Чувствительным органом преобразователя является тонкий провод из сплавов высокого сопротивления (манганин, константан и т. д.), равномерно намотанный на каркас из изоляционного материала (пластмасса, керамика и др.). Движок (щетку) изготовляют из фосфористой бронзы, а в ответственных случаях сплавов платины с иридием или бериллием.
Чувствительным органом преобразователя является тонкий провод из сплавов высокого сопротивления (манганин, константан и т. д.), равномерно намотанный на каркас из изоляционного материала (пластмасса, керамика и др.). Движок (щетку) изготовляют из фосфористой бронзы, а в ответственных случаях сплавов платины с иридием или бериллием.


