
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Приведение моментов и моментов инерцииСтр 1 из 4Следующая ⇒
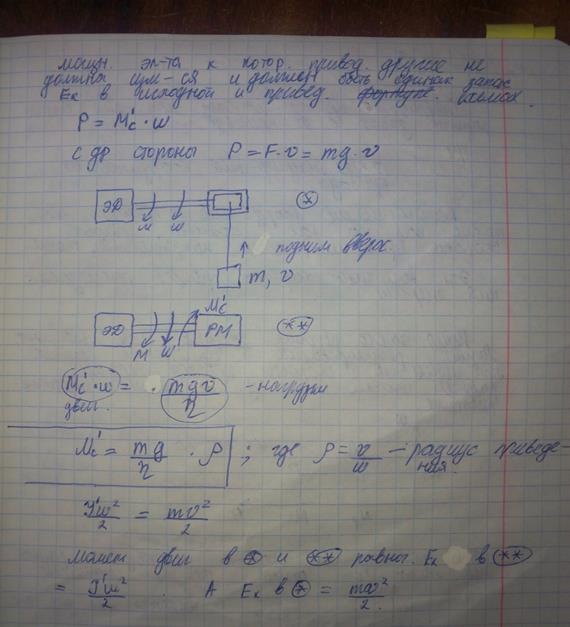
Приведение моментов и моментов инерции Обычно между двигателем и нагрузкой находится какая-либо механическая передача (рис. 1.1, 1.2), т.е. имеется несколько различных валов со своими моментами и скоростями. Для сведения любой реальной системы к простейшей модели на рис. 2.1 нужно выполнить ряд операций, называемых приведением моментов и моментов инерции к некоторому выбранному в качестве основного валу, обычно - к валу двигателя. Иными словами, некоторую реальную механическую систему, например, показанную на рис. 2.2,а, нужно заметить эквивалентной системой (рис. 2.2,б), такой, чтобы эта замена не отразилась на поведении части системы, оставленной неизменной (двигателя).
a)
б) Рис. 2.2. К приведению Мсм и Jнагр к валу двигателя Примем следующие допущения: система жесткая, без зазоров; моменты инерции, относящиеся к основным валам, неизменны, относящиеся к промежуточным валам, если такие есть, равны нулю; отношение В реальной и приведенной системах должны остаться неизменной мощность, развиваемая двигателем
Здесь в целях упрощения мы не учли потери в передачах; это обычно не приводит к большим погрешностям, если динамические режимы не играют определяющую роль в работе привода.
Приведение моментов и моментов инерции при поступательном движении
Допустимые пределы изменения основных координат электропривода. Рассмотрим теперь допустимые (безопасные) пределы изменения основных координат. Напряжение нормально ограничивается номинальным значением. В реверсивных электроприводах допускается на время реверса двукратное превышение номинального значения. Магнитный поток также ограничен номинальной величиной, поскольку при ее длительном превышении ток возбуждения, превышающий номинальный, может вызвать недопустимый перегрев обмоток. Кратковременное (до минуты) двукратное увеличение тока возбуждения, используемое, например, в электроприводах с питанием якорной цепи от источника тока, допустимо, однако вследствие насыщения магнитный поток при этом увеличивается незначительно. При форсировках - ускоренном нарастании магнитного потока - допустимо кратковременное 2-3 - кратное превышение номинального напряжения возбуждения.
Скорость по условиям механической прочности нормально ограничена номинальным значением с небольшим 20-30% допустимым превышением; специальные двигатели, предназначенные для работы с ослабленным полем, допускают 3-4 -кратное превышение номинальной скорости. Ток якоря - координата, определяющая надежность работы электропривода. В продолжительном режиме ток на всех скоростях не должен превышать номинального значения при независимом охлаждении двигателя - сплошные линии со штриховкой на рис. 3.12. В двигателях, охлаждаемых собственным вентилятором, в продолжительном режиме необходимо снижать ток на 30-40% при низких скоростях - пунктир на рис. 3.12 во избежание недопустимого перегрева. Кратковременные (секунды) перегрузки по току ограничиваются условиями коммутации машины; допустимые перегрузки обычно не превышают (2-3) Iн - линии с двойной штриховкой на рис. 3.12. Из изложенного следует недопустимость пуска электропривода постоянного тока (кроме микроприводов) прямым включением на номинальное напряжение.
Рис. 3.12. Область допустимых нагрузок электропривода постоянного тока Момент при полном потоке имеет те же ограничения, что и ток якоря. Таким образом, зона допустимых значений Реостатное регулирование. Как и в электроприводе постоянного тока это простейший способ регулирования: в каждую фазу ротора включают одинаковые резисторы с сопротивлением Rд - рис. 4.10,б. Тогда общее активное сопротивление фазы ротора составит R2 = Rр + Rд, а искусственные характеристики приобретут вид, представленный на рис. 4.10,в,г: предельное значение тока ротора I¢2 пред и критический момент Мк в соответствии с (4.8) и (4.11) не изменяется, а sк в соответствии с (4.12) растет пропорционально R2:
Последнее соотношение для критического скольжения, очевидно, выполняется и для скольжения при любом М = const, оно похоже на (3.16), а реостатные механические характеристики похожи на таковые для двигателя постоянного тока. Показатели реостатного регулирования скорости асинхронных двигателей с фазным ротором практически те же, что у электропривода постоянного тока. 1. Регулирование однозонное - вниз от основной скорости. 2. Диапазон регулирования (2-3):1, стабильность скорости низкая. 3. Регулирование ступенчатое. С целью устранения этого недостатка иногда используются схемы, в которых роторный ток выпрямляется и сглаживается реактором, а резистор, включаемый за выпрямителем, шунтируется управляемым ключом - транзистором с управляемой скважностью, благодаря чему достигается плавность регулирования, а при использовании обратных связей формируются жесткие характеристики. 4. Допустимая нагрузка Мдоп = Мн, поскольку Ф» Фн и при мало меняющемся cos j2 I2доп» I2н. 5. С энергетической точки зрения реостатное регулирование в асинхронном электроприводе столь же неэффективно, как и в электроприводе постоянного тока - потери в роторной цепи при M = const пропорциональны скольжению:
а распределение этих потерь определяется в соответствии с (4.18) соотношением сопротивлений - собственно в роторной обмотке рассеивается мощность 6. Капитальные затраты, как и в электроприводе постоянного тока, сравнительно невелики. Приведение моментов и моментов инерции Обычно между двигателем и нагрузкой находится какая-либо механическая передача (рис. 1.1, 1.2), т.е. имеется несколько различных валов со своими моментами и скоростями. Для сведения любой реальной системы к простейшей модели на рис. 2.1 нужно выполнить ряд операций, называемых приведением моментов и моментов инерции к некоторому выбранному в качестве основного валу, обычно - к валу двигателя. Иными словами, некоторую реальную механическую систему, например, показанную на рис. 2.2,а, нужно заметить эквивалентной системой (рис. 2.2,б), такой, чтобы эта замена не отразилась на поведении части системы, оставленной неизменной (двигателя).
a)
б) Рис. 2.2. К приведению Мсм и Jнагр к валу двигателя Примем следующие допущения: система жесткая, без зазоров; моменты инерции, относящиеся к основным валам, неизменны, относящиеся к промежуточным валам, если такие есть, равны нулю; отношение В реальной и приведенной системах должны остаться неизменной мощность, развиваемая двигателем
Здесь в целях упрощения мы не учли потери в передачах; это обычно не приводит к большим погрешностям, если динамические режимы не играют определяющую роль в работе привода.
|
|||||||
|
|
Последнее изменение этой страницы: 2016-08-06; просмотров: 556; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.222.193.207 (0.009 с.) |
 и КПД передачи
и КПД передачи  - постоянны.
- постоянны. , т.е. в нашем случае, когда потери покрываются двигателем (М и
, т.е. в нашем случае, когда потери покрываются двигателем (М и  направлены согласно):
направлены согласно): , откуда
, откуда  . (2.2) Потери всегда покрываются той частью системы, которая создает движение, поэтому при обратном потоке мощности - от нагрузки к двигателю
. (2.2) Потери всегда покрываются той частью системы, которая создает движение, поэтому при обратном потоке мощности - от нагрузки к двигателю  . (2.2,а)В реальной и приведенной системах должны быть одинаковы запасы кинетической энергии, т.е.
. (2.2,а)В реальной и приведенной системах должны быть одинаковы запасы кинетической энергии, т.е.  или
или  (2.3)
(2.3)


 и М сравнительно невелика, и рис. 3.12 даёт о ней некоторое представление: внутренняя область относится к продолжительному режиму, внешняя - к кратковременным (секунды) перегрузкам.
и М сравнительно невелика, и рис. 3.12 даёт о ней некоторое представление: внутренняя область относится к продолжительному режиму, внешняя - к кратковременным (секунды) перегрузкам. . (4.18)
. (4.18) ,
, , а в дополнительных резисторах - мощность
, а в дополнительных резисторах - мощность  .
.


