
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Исследование характеристик машинСтр 1 из 4Следующая ⇒
ИССЛЕДОВАНИЕ ХАРАКТЕРИСТИК МАШИН ПЕРЕМЕННОГО И ПОСТОЯННОГО ТОКА В РАЗЛИЧНЫХ РЕЖИМАХ РАБОТЫ
Учебно-методическое пособие к курсовой работе
Ростов-на-Дону
Трубицина, Н.А. Исследование характеристик машин переменного и постоянного тока в различных режимах работы: учебно-методическое пособие к курсовой работе / Н.А. Трубицина, М.Ю. Пустоветов М.А. Трубицин; Рост. гос. ун-т путей сообщения. – Ростов н/Д, 2013. – 34 с. – Библиогр.: 5 назв.
Приведены методики и примеры расчета асинхронного двигателя с фазным и короткозамкнутым ротором в различных режимах работы. Содержатся основные технические данные двигателей различных типов. Предназначено для студентов специальностей «Электромеханика», «Автоматика, телемеханика и связь на железнодорожном транспорте», по дисциплинам: «Электрический привод» и «Электрические машины». Рекомендовано к изданию кафедрой «Электрические машины и аппараты».
Рецензент канд. техн. наук, доц. Н.К. Колесников Ростовский филиал «МГАВТ» ОБЩИЕ СВЕДЕНИЯ Приводом называет устройство, предназначенное для приведения в действие машин и механизмов. Привод, в котором в качестве двигателя применяется электрический двигатель, называет электрическим приводом или электроприводом (ЭП). ГОСТ дает следующее определение ЭП: электропривод –электромеханическая система, состоящая из электродвигательного, преобразовательного, передаточного и управляющего устройств, предназначенная для приведения в движение исполнительных органов рабочей машины (ИОРМ) и управления этим движением. Структура ЭП представлена на рисунке1.
Рисунок 1. – Структура электропривода
Преобразовательное устройство (1) предназначено для преобразования электрической энергии (I,U,f), используемой в ЭП. Электродвигательное устройство (2) предназначено для преобразования электрической энергии в механическую. Передаточное устройство (3) предназначено для передачи механической энергии от электродвигателя к ИОРМ и согласования вида и скоростей их движения. В отдельных случаях преобразовательные и передаточные устройства могут отсутствовать. Управляющее устройство (4) обеспечивает заданный режим работы ЭП и выполняет автоматический пуск, реверсирование, торможение, регулирование и стабилизацию частоты вращения и т.д.
Широкое распространение ЭП обусловлено рядом его достоинств: простота подвода энергии, удобство эксплуатации, простота осуществления автоматизации управления, малые габариты и вес, высокий КПД, надежность работы и быстродействие, широкий диапазон мощностей, больше пределы регулирования частоты вращения и т.д. В качестве электродвигательного устройства могут быть использованы как двигатели постоянного тока (обычно независимого или параллельного возбуждения), так и переменного (чаще всего асинхронные двигатели с короткозамкнутым ротором). Таблица 1. – Исходные данные к задаче 1
Технические данные асинхронных двигателей с фазным ротором (U1Л = 380 В; U1ф = 220 В; f = 50 Гц)
Примечание:
для расчетов в режиме электродинамического торможения варианты: с 1 по 5 используют схемы а) и в), отношения: IП/I0 =1,5; для схемы а) IП/I1а =1,23; для схемы в) IП/I1в =1,41; с 6 по 10 – схемы б) и г), отношения: IП/I0 =2,0; для схемы б) IП/I1б =1,06; для схемы г) IП/I1г =2,12; с 11 по 15 используют схемы в) и д), отношения: IП/I0 =2,5; для схемы в) IП/I1в =1,41; для схемы д) IП/I1д =2,45; с 16 по 20 – схемы а) и г), отношения: IП/I0 =3,0; для схемы а) IП/I1а =1,23; для схемы г) IП/I1г =2,12; с 21 по 25 – схемы б) и д), отношения: IП/I0 =3,5; для схемы б) IП/I1б =1,06; для схемы д) IП/I1д =2,45. Схемы включения обмоток статора АД в сеть постоянного (выпрямленного) напряжения приведены на рисунке 2.
Рисунок 2. – Схемы включения обмоток статора АД в сеть постоянного (выпрямленного) напряжения Задача 1 Пример расчета АД с фазным ротором Рассчитать ступенчатый пуск, и исследовать статические характеристики асинхронного двигателя (АД) с фазным ротором в двигательном режиме и в режиме электродинамического торможения, а также переходной процесс АД в двигательном режиме. Основные параметры двигателя приведены в таблице 2.
Таблица 2. – Параметры АД с фазным ротором
Задача 2 Пример расчета АД с короткозамкнутым ротором В задаче требуется: 1 Рассчитать рабочие характеристики асинхронного двигателя (АД) и построить зависимости частоты вращения 2 Расчет следует выполнить для значений скольжения 3 Для каждой величины скольжения нужно определить [1]: величины тока холостого хода - активные - реактивные - действующие величины тока статора - активные - реактивные - действующие величины тока ротора - активные - реактивные - действующие величины мощности - потребляемую - преобразованную - полезную коэффициенты мощности
КПД
частоту вращения ротора
момент на валу
Исходные данные к задаче 2 приведены в таблице 4. Вариант № 39
Номинальная мощность на валу Р2н, Вт 15000 Номинальное линейное напряжение U1н, В 380 Синхронная угловая частота n1н, об/мин 1500 КПД η, о.е. 0,89 Коэффициент мощности cosφ1н, о.е. 0,63 Активное сопротивление цепи намагничивания r*m, о.е. 0,15 Индуктивное сопротивление цепи намагничивания х*m, о.е. 3,8 Активное сопротивление обмотки статора r*1, о.е. 0,026 Приведенное активное сопротивление обмотки ротора r*/2, о.е. 0,034 Индуктивное сопротивление обмотки статора х*1, о.е. 0,105 Приведенное индуктивное сопротивление обмотки ротора х*/2, о.е. 0,13 Механические потери мощности Рмех, Вт 100
Для расчёта используем Г-образную схему замещения асинхронного двигателя с вынесенным намагничивающим контуром:
Рисунок 7. – Г-образная схема замещения асинхронной машины:
Для данной схемы замещения определим номинальные фазные напряжения и фазные токи, а также поправочный коэффициент 1 Фазное напряжение, В:
2 Потребляемая мощность, Вт:
3 Фазный ток статора, А:
Заданные относительные значения сопротивлений переводим в омические.
4 Коэффициент перевода электрических параметров из относительных единиц в омические, Ом:
5 Активное сопротивление цепи намагничивания, Ом:
6 Индуктивное сопротивление цепи намагничивания, Ом:
7 Активное сопротивление фазы обмотки статора, Ом:
8 Индуктивное сопротивление фазы обмотки статора, Ом:
9 Приведённое активное сопротивление фазы обмотки ротора, Ом:
10 Приведённое индуктивное сопротивление фазы обмотки ротора, Ом:
11 Полное активное сопротивление контура намагничивания, Ом:
12 Полное индуктивное сопротивление контура намагничивания, Ом:
13 Полное эквивалентное сопротивление контура намагничивания, Ом:
14 Коэффициент мощности, о.е.:
15 Синус угла
16 Действующее значение тока холостого хода статора, А:
17 Активная составляющая тока холостого хода, А:
18 Реактивная составляющая тока холостого хода, А:
19 Поправочный коэффициент:
Далее, задавшись значениями скольжения 20 Приведённое активное сопротивление фазы обмотки ротора, Ом:
21 Эквивалентное активное сопротивление рабочего контура, Ом:
22 Добавочное приведённое активное сопротивление в цепи ротора:
23 Приведённое индуктивное сопротивление рабочего контура, Ом:
24 Полное приведённое сопротивление рабочего контура, Ом:
25 Коэффициент мощности, о.е.:
26 Действующее значение тока ротора, А:
27 Активная составляющая тока ротора, А:
28 Реактивная составляющая тока ротора, А:
29 Активная составляющая тока статора, А:
30 Реактивная составляющая тока статора, А:
31 Действующее значение тока статора, А:
32 Коэффициент мощности, о.е.:
33 Преобразованная мощность, Вт:
34 Добавочные потери, Вт:
35 Полезная мощность на валу двигателя, Вт:
36 Потребляемая мощность, Вт:
37 Частота вращения ротора, об/мин:
38 Момент на валу двигателя, Н·м:
39 КПД двигателя, о.е.:
Все расчеты сводятся в таблицу 8, а рабочие характеристики представлены на рисунке 8.
Таблица 3. – Данные расчета рабочих характеристик АД
Рисунок 8. – Рабочие характеристики АД БИБЛИОГРАФИЧЕСКИЙ СПИСОК 1. Копылов, И. П. Электрические машины: учеб. для вузов / И.П. Копылов. – 2-е изд., перераб. – М.: Высш. шк.: Логос, 2005. – 607 с: ил. 2. Вольдек, А. И. Электрические машины. Введение в электромеханику. Машины постоянного тока и трансформаторы: учеб. для вузов / А.И. Вольдек, В.В. Попов. – М.; СПб.: Питер, 2007. – 319 с.: ил. 3. Овсянников Е.М. Электрический привод: учебник / Е.М. Овсянников. – М.: ФОРУМ, 2011. – 224 с.: ил. 4. Кисаримов Р.А. Электропривод: Справочник. – М.: ИП «РадиоСофт», 2010. – 352 с.: ил. 5. М.Ю. Пустоветов, А.В. Чубукин, М.П. Фуражировский. Статические и динамические расчеты электроприводов: Метод. указания к курсовому проектированию по дисциплине «Теория электропривода» / РГАСХМ ГОУ, Ростов н/Д, 2005. – 60 с.
Учебное издание Пустоветов Михаил Юрьевич Трубицин Михаил Анатольевич
В РАЗЛИЧНЫХ РЕЖИМАХ РАБОТЫ Учебно-методическое пособие к курсовой работе
Редактор А.В. Артамонов Техническое редактирование и корректура А.В. Артамонова
Подписано в печать 28.12.2010. Формат 60×84/16. Бумага газетная. Ризография. Усл. печ. л. 1,4. Уч.-изд. л. 1,33. Тираж 100 экз. Изд. № 80. Заказ №
Ростовский государственный университет путей сообщения. Ризография РГУПС.
Адрес университета: 344038, г. Ростов н/Д, пл. Ростовского Стрелкового Полка Народного Ополчения, 2
ИССЛЕДОВАНИЕ ХАРАКТЕРИСТИК МАШИН
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-08-01; просмотров: 227; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.14.132.214 (0.145 с.) |
 УДК 621.313.333
УДК 621.313.333

 , вращающего момента
, вращающего момента  , тока обмотки статора
, тока обмотки статора  , потребляемой мощности
, потребляемой мощности  , коэффициента мощности
, коэффициента мощности  и коэффициента полезного действия (КПД)
и коэффициента полезного действия (КПД)  в функции полезной мощности
в функции полезной мощности  : (
: ( .
.
 ,
, ,
, ;
; ,
, ,
, ,
, ,
, ;
; ,
, ;
;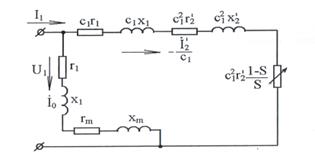
 – активное сопротивление фазы обмотки статора;
– активное сопротивление фазы обмотки статора;  – индуктивное сопротивление фазы обмотки статора;
– индуктивное сопротивление фазы обмотки статора;  – приведённое активное сопротивление фазы обмотки ротора;
– приведённое активное сопротивление фазы обмотки ротора;  – приведённое индуктивное сопротивление фазы обмотки ротора;
– приведённое индуктивное сопротивление фазы обмотки ротора;  – активное сопротивление цепи намагничивания;
– активное сопротивление цепи намагничивания;  – индуктивное сопротивление цепи намагничивания;
– индуктивное сопротивление цепи намагничивания;  – скольжение;
– скольжение;  – комплексный коэффициент;
– комплексный коэффициент;  – намагничивающий ток;
– намагничивающий ток;  – приведенный ток ротора;
– приведенный ток ротора;  – напряжение питающей сети
– напряжение питающей сети , учитывая, что обмотка статора соединена по схеме «звезда».
, учитывая, что обмотка статора соединена по схеме «звезда». ; (34)
; (34)
 ; (35)
; (35)
 (36)
(36)
 ; (37)
; (37)
 ; (38)
; (38)
 ; (39)
; (39)
 ; (40)
; (40)
 ; (41)
; (41)
 ; (42)
; (42)
 ; (43)
; (43)
 ; (44)
; (44)
 ; (45)
; (45)
 ; (46)
; (46)
 ; (47)
; (47)
 , о.е.:
, о.е.: ; (48)
; (48)
 ; (49)
; (49)
 ; (50)
; (50)
 ; (51)
; (51)
 ; (52)
; (52)
 , указанными в задании, рассчитываем величины, приведенные в таблице 8.
, указанными в задании, рассчитываем величины, приведенные в таблице 8. . (53)
. (53) . (54)
. (54) . (55)
. (55) . (56)
. (56) . (57)
. (57) . (58)
. (58) . (59)
. (59) . (60)
. (60) . (61)
. (61) . (62)
. (62) . (63)
. (63) . (64)
. (64) . (65)
. (65) . (66)
. (66) . (67)
. (67) . (68)
. (68) . (69)
. (69) . (70)
. (70) . (71)
. (71) . (72)
. (72)




















