Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Система автоматического управления электроприводомСтр 1 из 2Следующая ⇒
СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ
Расчётно-пояснительная записка
«Системы управления электроприводом»
Выполнил студент группы ЭАБ-10 /Шуватов И.Д. / (подпись)
Проверил к.т.н / Сарапулов О. А. / (подпись)
Проект допущен к защите «» «» 2014 г.
Проект защищён «» «» 2014 г.
Белорецк 2014 Содержание
Содержание. 2 Введение. 3 1. Характеристика объекта регулирования. 4 1.1 Технические данные двигателя. 4 1.2 Выбор и характеристика тиристорного преобразователя. 4 1.3 Основные параметры объекта регулирования. 8 2. Построение САР ЭДС.. 14 2.1 Построение контура регулирования тока. 14 2.1.1 Контур регулирования тока. Стандартный вариант регулятора тока. Двойной регулятор тока 14 2.1.2 Построение адаптивной модели регулятора тока. 19 2.1.3 Анализ влияния внутренней обратной связи по ЭДС двигателя, компенсация влияния ЭДС двигателя. 22 2.1.4 Оценка величины производной тока. Задатчик интенсивности тока. 26 2.2 Построение контура регулирования ЭДС (скорости) 30 2.2.1 Контур регулирования ЭДС (скорости), оценка заданной точности регулирования скорости 30 2.2.2 Пропорциональный регулятор ЭДС (скорости) 33 Заключение....................................................................................................................................35
Введение
Комплексная автоматизация технологических процессов вызывает необходимость более широкого внедрения позиционных систем управления электроприводом. Система автоматизации выдаёт для таких механизмов, как нажимные винты, ограничивающие линейки, манипуляторы, сталкиватели, всего один параметр – заданное положение. При отсутствии позиционной системы для управления этими механизмами необходимо было бы задать величину скорости привода, темп торможения, момент его начала и окончания. Всё это существенно усложнило бы функции системы управления. Современные позиционные системы автоматического управления (САУ) электропривода построены в основном по системе тиристорный преобразователь – двигатель. В приводах с позиционным управлением, как правило, задаётся лишь конечное значение координат положения, при этом задание изменяется скачком. Минимально возможное задание на перемещение составляет 0,01 – 0,00001 % полного хода механизма. Желаемая точность отработки – основной параметр, определяющий как структуру позиционной САУ, так и состав её элементов.
Целью данного курсового проекта является разработка позиционной системы подчиненного регулирования координат с последовательной коррекцией (СПРК) для конкретного двигателя постоянного тока независимого возбуждения, питающегося от реверсивного тиристорного преобразователя. Из этого вытекают основные задачи проектирования: -по номинальным данным электродвигателя выбор реверсивного тиристорного преобразователя; - с учётом особенностей объекта регулирования и влияний возмущающих воздействий разработка структурной схемы СПРК; - анализ динамических показателей спроектированной САУ; - разработка принципиальной электрической схемы системы регулиров
ХАРАКТЕРИСТИКА ОБЪЕКТА РЕГУЛИРОВАНИЯ Технические данные двигателя
Технические данные двигателя представлены в таблице 1.1
Таблица 1.1 - Технические данные двигателя Д818 - Вариант 34
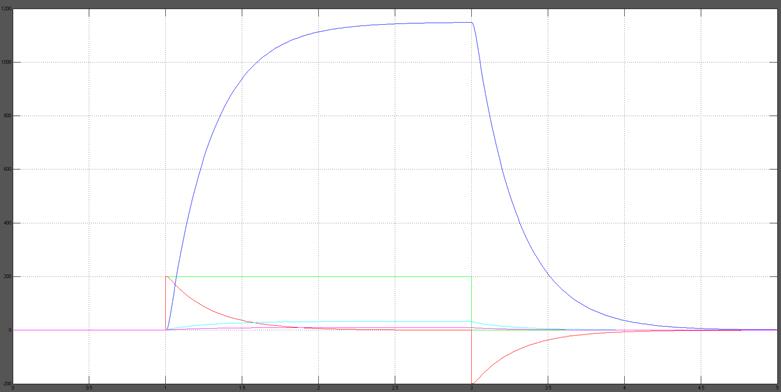
Построение системы автоматического регулирования Рисунок 2.1.б - Осциллограмма Iя в контуре регулирования тока. Двойной регулятор тока
В том случае, когда постоянная времени ТП относительно мала (менее одной мс), для повышения качества работы СУЭП электропривода в режиме прерывистых токов возможно использование двойного контура регулирования якорного тока. При построении двойного регулятора тока ТП принимают безинерционным звеном с коэффициентом передачи kп.
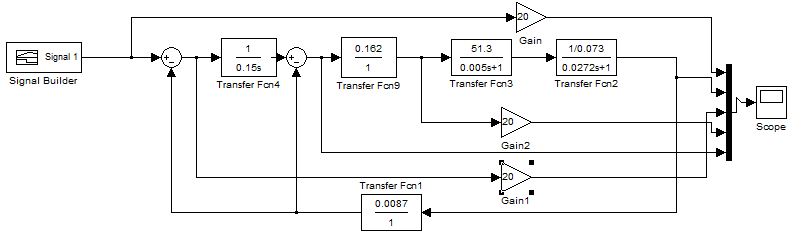
На рис. 7 представлена структурная схема двойного РТ. Замкнутый первый (внутренний) контур регулирования тока с пропорциональным (П) РТ1 в непрерывном режиме имеет передаточную функцию инерционного звена, реализующего предельное быстродействие из условий дискретности ТП с эквивалентной постоянной времени фильтра T'a = 3,3 мс для шестипульсной схемы выпрямления и T'a = 1,67 мс для двенадцатипульсной схемы выпрямления:
тогда
На основании вышеизложенного, передаточная функция первого замкнутого контура регулирования якорного тока может быть представлена в виде:
где В этом случае замкнутый внутренний контур регулирования якорного тока представляет собой эквивалентный фильтр прямого канала регулирования с некомпенсируемой постоянной времени Передаточная функция второго контура регулирования соответствует передаточной функции оптимальной системы второго порядка (3,4) и в соответствии с (1) передаточная функция второго РТ2 записывается в виде:
т. е. второй регулятор тока – интегральный. В режиме прерывистых токов, когда ток прерывается, внутренний токовый контур размыкается, т. к. сигнал обратной связи по току равен нулю, и коэффициент интегрального РТ2 увеличивается в kрт1раз, компенсируя изменение параметров объекта регулирования в прерывистом режиме. Имеются и другие варианты СУЭП с двойными регуляторами, например, с внутренним контуром регулирования напряжения [2,6,11,15].
Рисунок 2.1 в - Схема контура двойного регулятора тока, собранная в среде Matlab.
Рисунок 2.1 г - Осциллограмма Iя в контуре двойного регулятора тока.
Рис.2.2.б - Осциллограмма Iя с адаптивным регулятором (эталонная модель)
Заключение В данном курсовом проекте была разработана система подчинённого регулирования тока и скорости По номинальным данным электропривода был выбран реверсивный тиристорный преобразователь и рассчитаны его характеристики. В соответствии с заданием, особенностями объекта регулирования и с учётом действия возмущающих воздействий была разработана структурная схема СПРК которая включает в себя три контура регулирования. Внутренний контур регулирования якорного тока содержит адаптивный регулятор тока, настроенный на максимальное быстродействие. Контур регулирования скорости содержит П-регулятор скорости, который при оптимальных переходных процессах обеспечивает заданную статическую ошибку по перемещению. Внешний контур регулирования положения содержит нелинейный регулятор положения. В программе Simulink были рассчитаны переходные процессы для режимов больших, средних и малых перемещений на холостом ходу. Анализ полученных результатов показал соответствие полученных результатов требованиям задания.
СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ
Расчётно-пояснительная записка
«Системы управления электроприводом»
Выполнил студент группы ЭАБ-10 /Шуватов И.Д. / (подпись)
Проверил к.т.н / Сарапулов О. А. /
(подпись)
Проект допущен к защите «» «» 2014 г.
Проект защищён «» «» 2014 г.
Белорецк 2014 Содержание
Содержание. 2 Введение. 3 1. Характеристика объекта регулирования. 4 1.1 Технические данные двигателя. 4 1.2 Выбор и характеристика тиристорного преобразователя. 4 1.3 Основные параметры объекта регулирования. 8 2. Построение САР ЭДС.. 14 2.1 Построение контура регулирования тока. 14 2.1.1 Контур регулирования тока. Стандартный вариант регулятора тока. Двойной регулятор тока 14 2.1.2 Построение адаптивной модели регулятора тока. 19 2.1.3 Анализ влияния внутренней обратной связи по ЭДС двигателя, компенсация влияния ЭДС двигателя. 22 2.1.4 Оценка величины производной тока. Задатчик интенсивности тока. 26 2.2 Построение контура регулирования ЭДС (скорости) 30 2.2.1 Контур регулирования ЭДС (скорости), оценка заданной точности регулирования скорости 30 2.2.2 Пропорциональный регулятор ЭДС (скорости) 33 Заключение....................................................................................................................................35
Введение
Комплексная автоматизация технологических процессов вызывает необходимость более широкого внедрения позиционных систем управления электроприводом. Система автоматизации выдаёт для таких механизмов, как нажимные винты, ограничивающие линейки, манипуляторы, сталкиватели, всего один параметр – заданное положение. При отсутствии позиционной системы для управления этими механизмами необходимо было бы задать величину скорости привода, темп торможения, момент его начала и окончания. Всё это существенно усложнило бы функции системы управления. Современные позиционные системы автоматического управления (САУ) электропривода построены в основном по системе тиристорный преобразователь – двигатель. В приводах с позиционным управлением, как правило, задаётся лишь конечное значение координат положения, при этом задание изменяется скачком. Минимально возможное задание на перемещение составляет 0,01 – 0,00001 % полного хода механизма. Желаемая точность отработки – основной параметр, определяющий как структуру позиционной САУ, так и состав её элементов. Целью данного курсового проекта является разработка позиционной системы подчиненного регулирования координат с последовательной коррекцией (СПРК) для конкретного двигателя постоянного тока независимого возбуждения, питающегося от реверсивного тиристорного преобразователя. Из этого вытекают основные задачи проектирования:
-по номинальным данным электродвигателя выбор реверсивного тиристорного преобразователя; - с учётом особенностей объекта регулирования и влияний возмущающих воздействий разработка структурной схемы СПРК; - анализ динамических показателей спроектированной САУ; - разработка принципиальной электрической схемы системы регулиров
|
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-08-01; просмотров: 588; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.15.147.215 (0.028 с.) |
 ,кВт
,кВт
 , В
, В
 , А
, А
 , об/мин
, об/мин

 , кг×м2
, кг×м2
 ), Ом
), Ом

 , %
, %
 , %
, %



 .
. , которая применяется при дальнейшей реализации СУЭП.
, которая применяется при дальнейшей реализации СУЭП.