
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
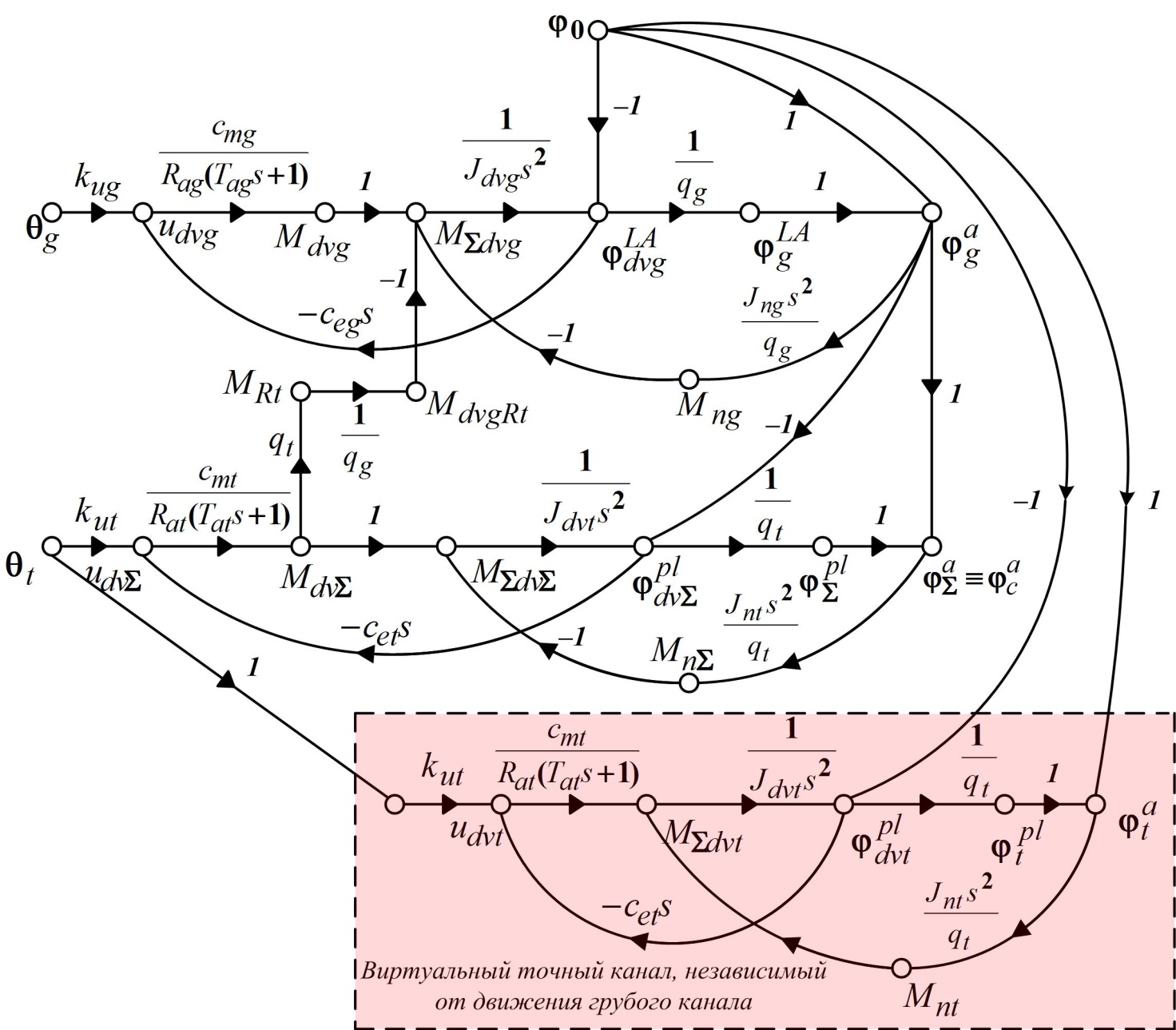
Структурная схема разомкнутой части двухканального СП с разделенной нагрузкой ⇐ ПредыдущаяСтр 2 из 2
Переписав системы дифференциальных уравнений (12.1) для рассматриваемой двухканального СП (без уравнений замыкания) с разделенной нагрузкой в условно-разрешенной причинно-следственной форме, граф сигналов разомкнутой части двухканального СП принимает вид, как показано на рис. 12.2.
Рис. 12.2
Каждый из 2-х представленных на рис. 12.2 приводов соответствует традиционной структурной схеме разомкнутой части СП на основе скоростного двигателя постоянного тока (ДПТ), размещенного на подвижном основании, как это в общем виде показано на рис. 12.3, где приняты обозначения:
Рис. 12.3
Также в качестве альтернативы редукторному приводу на основе скоростного ДПТ будем рассматривать безредукторный привод ( На рис. 12.4 показаны механические характеристики скоростного и моментного ДПТ, характеризуемые постоянными значениями Применим к графу по рис. 12.3 формулу Мейсона, что позволяет записать соотношения, соответствующие структурной схеме разомкнутой части двухканального СП с разделенной нагрузкой, и которые будут востребованы при анализе работы двух приводов (скоростного ‒ «sk» и моментного ‒ «mom»), реализующих принцип суммирование двух выходных координат по принципу разделенной нагрузки.
Рис. 12.4
12.3 ПФ альтернативных вариантов двухканального СП с разделенной нагрузкой по входному и возмущающему воздействиям
12.3.1 ПФ прямых передач от Характеристические определители разомкнутых приводов в альтернативных случаях равны:
где
Числители прямых передач от
Следовательно, ПФ альтернативных вариантов разомкнутых приводов равны:
где:
12.3.2 ПФ прямых передач от Числители прямых передачи от
а к выходной координате
Следовательно, ПФ каналов связи основания с выходными координатами для альтернативных вариантов равны:
 ; ;
 ; ;
где: Рассмотрим следующие выражения:
 ; ;
что позволяет в дальнейшем рассматривать ПФ связи с выходными координатами привода как в абсолютной, так и в относительной системах координат.
12.3.3 ПФ прямой передачи от Числители прямых передач от угла рассогласования
Следовательно, ПФ прямых передач от
Числители прямых передач от
Следовательно, ПФ передач от внешнего момента
12.3.4 ПФ альтернативных вариантов канала формирования момента реакции от точного к грубому каналам Для момента реакции привода, расположенного на платформе («t»), на эту платформу, т.е. на движение грубого привода («g») на основании формул (12.9)÷(12.12) можно записать следующие выражения. 1. Грубый и точный приводы строятся на основе скоростных редукторных ДПТ:
где
2. Грубый привод строится на основе моментного безредукторного ДПТ, а точный привод ‒ на основе скоростного редукторного ДПТ:
где
|
|||||||||
|
|
Последнее изменение этой страницы: 2016-08-01; просмотров: 188; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.191.202.45 (0.011 с.) |
 ‒ угол поворота основания, на котором размещен ДПТ, в абсолютной СК;
‒ угол поворота основания, на котором размещен ДПТ, в абсолютной СК; ‒ внешний момент, приложенный к валу ротора ДПТ;
‒ внешний момент, приложенный к валу ротора ДПТ; ,
,  ‒ угол поворота относительно основания ротора ДПТ и полезной нагрузки привода в СК, соответственно.
‒ угол поворота относительно основания ротора ДПТ и полезной нагрузки привода в СК, соответственно.
 ) на основе моментного ДПТ (
) на основе моментного ДПТ ( ) с целью определения областей их рационального применения при создании СН с разделенной нагрузкой.
) с целью определения областей их рационального применения при создании СН с разделенной нагрузкой. во всем диапазоне рабочих скоростей. Промежуточное положение между моментными и скоростными ДПТ занимают синхронные двигатели (БДПТ), характеризуемые переменными значениями
во всем диапазоне рабочих скоростей. Промежуточное положение между моментными и скоростными ДПТ занимают синхронные двигатели (БДПТ), характеризуемые переменными значениями 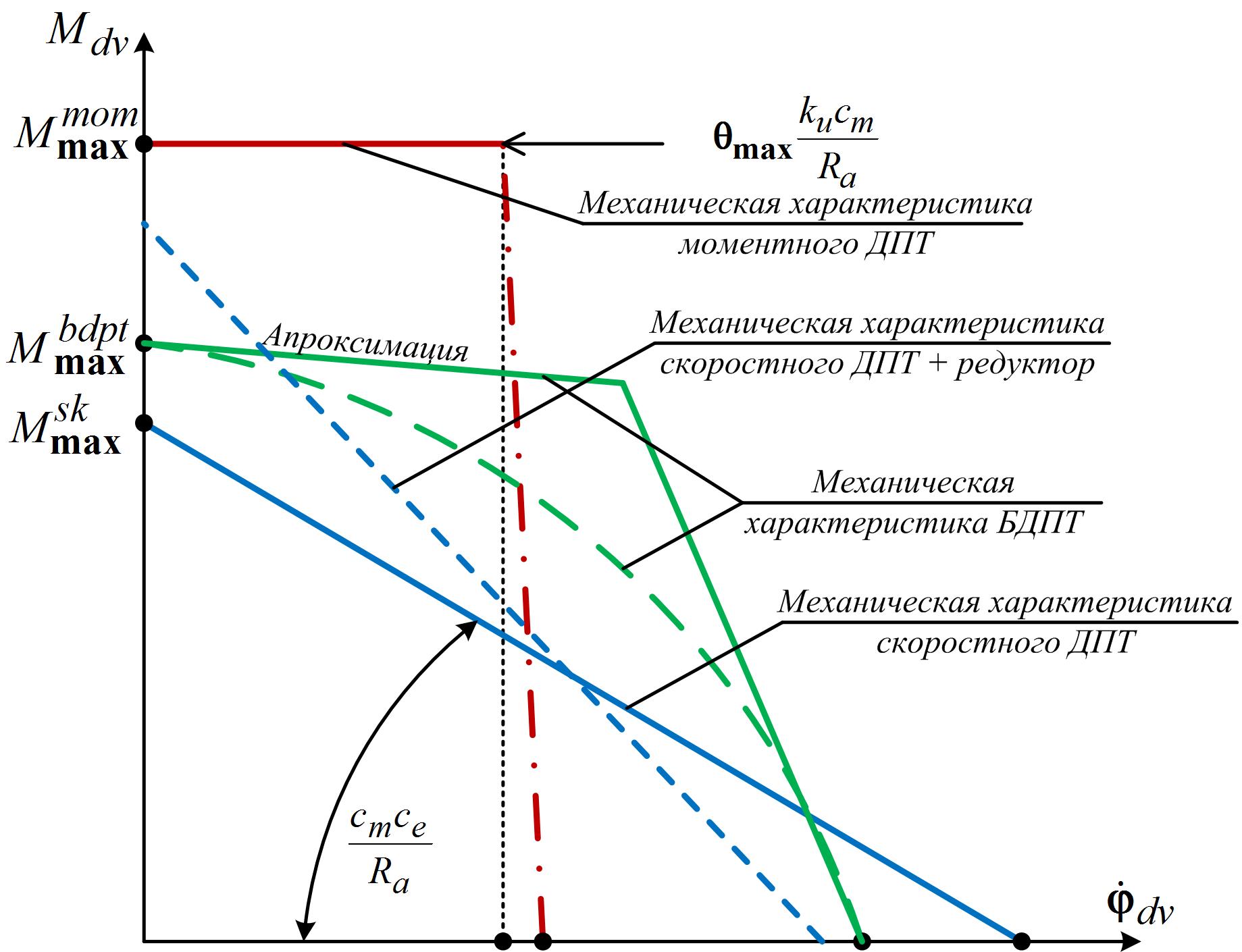
 к выходным координатам
к выходным координатам  и
и 
 ; (12.2)
; (12.2) , (12.3)
, (12.3) ‒ суммарный момент инерции подвижных частей привода, приведенный к ротору ДПТ;
‒ суммарный момент инерции подвижных частей привода, приведенный к ротору ДПТ; ‒ суммарный момент инерции подвижных частей привода прямого действия (безредукторного).
‒ суммарный момент инерции подвижных частей привода прямого действия (безредукторного). ,
, .
.
 ; (12.4)
; (12.4) , (12.5)
, (12.5) ‒ электромеханическая постоянная времени привода (суммарный момент инерции нагрузки приведен к ротору ДПТ);
‒ электромеханическая постоянная времени привода (суммарный момент инерции нагрузки приведен к ротору ДПТ); ‒ добротность астатического первого порядка редукторного привода по скорости;
‒ добротность астатического первого порядка редукторного привода по скорости; ‒ добротность астатического второго порядка безредукторного привода по ускорению.
‒ добротность астатического второго порядка безредукторного привода по ускорению. к выходным координатам
к выходным координатам 
 ;
; ,
, :
: .
.

 . (12.6)
. (12.6) ,
, ‒ электромеханическая постоянная времени ДПТ без инерционной нагрузки.
‒ электромеханическая постоянная времени ДПТ без инерционной нагрузки.
 ,
, к движущему моменту
к движущему моменту  и от
и от  к
к 
 ;
; .
.

 ; (12.9)
; (12.9) . (12.10)
. (12.10) ,
,  .
.
 ; (12.11)
; (12.11) . (12.12)
. (12.12)

 , (12.13)
, (12.13) ‒ коэффициент статического усиления канала передачи момента реакции.
‒ коэффициент статического усиления канала передачи момента реакции. ;
; ‒ коэффициент соотношения нагрузок приводов грубого и точного каналов.
‒ коэффициент соотношения нагрузок приводов грубого и точного каналов.
 , (12.16)
, (12.16) .
.


