
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Конструкція плунжерної електрогідравлічної рульової машини. Експлуатаційні характеристики. Схема гідроприводу і варіанти його використання.
Плунжерные ГРМ Плунжерные ГРМ являются наиболее распространенными в мировом судостроении. Они изготовляются многими зарубежными фирмами. Эти ГРМ, несмотря на конструктивное разнообразие, имеют установившиеся характерные особенности. Кратко изложим наиболее общие вопросы конструктивного исполнения этих ГРМ. Схемы компоновки плунжерных ГРМ приведены на рис. 4.1. Основными их элементами являются двух- или четырехплунжерный рулевой привод (исполнительный орган ГРМ), насосы, система гидравлических коммуникаций с емкостями рабочей жидкости (на схеме не показаны) и система управления рулевой машиной. Более подробно все элементы этих ГРМ и их взаимодействие показаны и рассмотрены на функциональных схемах и принципиальных гидравлических системах. Основные достоинства плунжерных ГРМ — надежность и долговечность работы привода, возможность эксплуатации ГРМ при различных сочетаниях четырех цилиндров. Недостатки — большие потери на трение (низкий механический КПД) в шарнирных соединениях Совершенствование плунжерных ГРМ идет в направлении упрощения конструкций, уменьшения массы и габаритных размеров, повышения КПД, надежности и безотказности в работе, увеличения моторесурса узлов и элементов, обеспечения простоты и удобства обслуживания, уменьшения начальной стоимости и трудозатрат на поддержание ГРМ постоянно в хорошем техническом состоянии
Рассмотрим работу автономной плунжерной ГРМ (рис. 1.4). Два идентичных исполнительных механизма ИМ (от двух линий управления) работают на один выходной управляющий элемент — шток 12, перемещение которого к является заданием для ГРМ на перекладку руля. Это задание с помощью рычагов BD (точка О при этом неподвижна) и FG, соединенных между собой в точке С, и штанги 17 передается насосам 8 регулируемой подачи, которые создают согласно полученным перемещениям e1 и е2 регулируемых органов подачу Q1 и Q2 рабочей жидкости.
Взаимное расположение насосов, приводимых в действие электродвигателями 7, таково, что их подачи складываются. При работе насосов в цилиндрах 6 плунжерного привода создается перепад давлений (р1—р2) и руль 1 посредством плунжеров 5 и румпеля 2 перемещается на некоторый угол α. При этом обратная механическая связь 4, отстоящая на расстоянии г0 от оси вращения баллера 3,
возвращает посредством рычагов БВ и РС штангу 17 в исходное среднее положение, при котором суммарное перемещение регулируемых органов насосов е — 0. Когда руль останавливается, его угол перекладки а соответствует заданию к по значению и направлению. Перемещение е штанги 17 в реальных условиях эксплуатации всегда несколько отличается от перемещений ех и е2 управляемых органов насосов из-за рассогласования их нулевых положений и люфтов в рычажном механизме управления насосами. Для согласования нулевых положений применяют регулировочное устройство — винтовые соединения 15, 16 на концах штанги NL. Серьги АВ и НQ компенсируют взаимное перемещение рычагов. В случае отказа дистанционной системы управления рулевая машина приводится в действие штурвалом 10, соединяемым вручную с редуктором 9. Указатели положения руля на мостике получают электрический сигнал от датчика 14, приводимого в действие рычагом 13, который соединен со штоком 12. Таким образом, данная ГРМ с механической обратной связью представляет собой самостоятельный замкнутый контур, т. е. автономную следящую систему, включенную последовательно замкнутому контуру электрической следящей системы управления. Все ЭГРМ могут работать с любым из двух или одновременно с обоими насосами.. При этом регулируемые органы обоих насосов приводятся в движение от одной управляющей штанги независимо от того, находятся в действии один из двух или оба насоса. Насос включается в работу запуском его электродвигателя с основного поста управления (на мостике), а также из румпельного помещения.
|
|||||
|
|
Последнее изменение этой страницы: 2016-07-11; просмотров: 255; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.141.100.120 (0.004 с.) |







 румпеля с плунжерами и в сальниках плунжеров, большие масса и габариты при давлениях рабочей жидкости 10—12 МПа.
румпеля с плунжерами и в сальниках плунжеров, большие масса и габариты при давлениях рабочей жидкости 10—12 МПа.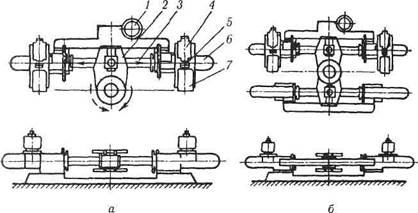
 . Схемы компоновки плунжерных ГРМ: двухплунжерная (а) и четырехплунжерная (б): 1 — штурвал местного аварийного управления, 2 — румпель, 3 — плунжер, 4 — насос, 5 — муфта, 6 — цилиндр, 7 — электродвигатель.
. Схемы компоновки плунжерных ГРМ: двухплунжерная (а) и четырехплунжерная (б): 1 — штурвал местного аварийного управления, 2 — румпель, 3 — плунжер, 4 — насос, 5 — муфта, 6 — цилиндр, 7 — электродвигатель.



