
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Робота контактних сельсинів у трансформаторному режимі
Індикаторна синхронна передача придатна лише в тому разі, коли моменту приймача достатньо для повороту пристрою, який приводиться до руху. Якщо необхідно створювати потужний обертаючий момент, то потрібно застосовувати силові сельсини.
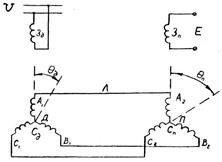
Рис. 16.9. Схема вмикання сельсинів у трансформаторному режимі В цьому випадку зростають потужності сельсинів та поперечний переріз ліній зв’язку. Раціональнішим рішенням задачі є передача малопотужного сигналу по лініях зв’язку, пропорційно кутові θ, й підсилення його з перетворенням в обертовий момент за допомогою допоміжного двигуна. Для цього застосовують трансформаторний режим роботи сельсинів. Схема вмикання сельсинів у цьому режимі наведена на рис.16.9. Обмотка збудження датчика, яка вмикається до мережі, створює потік збудження. Цей потік наводить у променях обмотки синхронізації ЕРС, які визначаються співвідношеннями (16.13). З обмотки збудження приймача одержується сигнал Е. Якщо врахувати опір ліній зв’язку формулами (16.19)÷(16.24) та вважати, що датчик Д і приймач П однакові машини, то в лініях зв’язку з урахуванням (16.18)÷(16.25) будуть проходити струми:
Ці струми створюють МРС:
де амплітуда МРС Fт визначається формулою (16.30) з урахуванням амплітуди струму Іт. Додаючись, ці МРС створюють результуючу МРС
Подовжня та поперечна складові МРС приймача можуть бути визначені таким чином.
Якщо врахувати (16.12), то
Аналогічно
або
Підставляючи з (16.55), (16.56) у (16.54), одержимо:
Отже, МРС приймача FП повертається на кут θ відносно подовжньої осі у напрямі, протилежному поворотові ротора датчика. МРС FП створює магнітний потік та ЕРС на затискачах обмотки збудження приймача:
З формули (16.58) витікає, що при θ=0 Е=Ет. Значно зручніше було б, якби Е була пропорційною θ. Для цього ротор приймача у початковому положенні попередньо повертають на 90º. Тоді
В схемах синхронної передачі виконавчий двигун живиться від приймача через підсилювач. При цьому одночасно повертається і ротор приймача до тих пір, доки не стане θ=0. Підсилювальний пристрій повинен споживати від вихідної обмотки приймача мінімальну потужність, оскільки в протилежному випадку виникають значні стуми, які створюють реакцію якоря й створюють залежність Е(θ).
Важливими характеристиками сельсина в трансформаторному режимі є питома вихідна ЕРС (ЕРС при θ=1º) та крутість ЕS кривої Е(θ):
Одновісні сельсини
Одновісні сельсини мають однопроменеву (однофазну) обмотку синхронізації. Схема вмикання одновісних сельсинів наведена на рис.16.10.
Рис. 16.10. Схема вмикання одновісних сельсинів При повороті роторів датчика та приймача на кути θд та θп в обмотках синхронізації виникають ЕРС:
Якщо θд ≠ θп й zд=zп=z, то в лінії проходить струм
З формули (16.62) витікає, що при θд = ±θп струм І=0, тобто за один оберт сельсин має два стійких положення, які відрізняються одне від одного на 2 θд. Тому ротор приймача може повертатись при повороті ротора датчика в той чи інший бік. Підставляючи у (16.62) з формули (16.12), одержимо:
де Fт визначається формулою (16.46). Синхронізуючий момент Мс дорівнює:
Зі співвідношення (16.65) витікає, що момент Мс сельсина з одновісною обмоткою залежить від θ та θд. При θп=0 (θд-θ=0) момент Мс=0 при будь-якому θ. Ці властивості одновісного сельсина обмежують область його застосування лише індикаторним режимом за умови, що θп=0÷180º.
Безконтактні сельсини
Контактні сельсина мають низку недоліків, основні з яких полягають в наявності не надійного ковзного контакту, збільшеному моменті тертя, іскрінні і т. д. Від цих недоліків вільні безконтактні сельсини. Такі сельсини пропонувались ще у 1896р. з появою дистанційної передачі кутових переміщень. Групу сельсинів складають безконтактні сельсини із Z-подібним ротором (рис.16.11).
а) б) в) Рис. 16.11. Безконтактні сельсини із Z-подібним ротором
У 1901р. Тірман запропонував конструкцію сельсина (рис.16.11, а). Основним недоліком цієї конструкції є наявність повітряного зазору 4. У 1913р. Бекман запропонував конструкцію рис.16.11, б без цього недоліку. Але і в тій, і в іншій конструкції магнітний потік проходить поперек листів пакета статора, що призводить до поганого використання сталі. Не дивлячись на це, конструкція рис.16.11, б краща, оскільки в ній повітряний зазор між статором 1 та ротором 2 менший, ніж в конструкції 16.11, а, яка має кільцеву обмотку синхронізації 6. Обидві конструкції мають котушкові обмотки збудження 5.
На рис.16.11, в наведена конструкція сельсина-телегона. Полюси ротора виконані у вигляді пелюсткових секторів, які обертаються сумісно з порожнистим стрижнем на валу 3. Обмотка збудження нерухома. Z-подібний ротор та ярмо статора виконані з м’якої сталі. Обмотка синхронізації двофазна. Безконтактні сельсини з винесеним зовнішнім магнітним ланцюгом конструктивно повторюють безконтактний кігтеподібний синхронний генератор фірми Уніон (патент 1897р.). Такий сельсин наведено на рис.16.12. Магнітний потік проходить по двох паралельних гілках магнітного ланцюга та замикається поза статором 1. Безконтактні сельсини, які продукувались в колишньому СРСР, є узагальненням такого типу машин.
Рис. 16. 12. Безконтактний сельсин із зовнішнім магнітним ланцюгом
Вони були розроблені у ВЕІ ім.Леніна у 1938р. професорами А.Т.Іосіфьяном та Д.В.Свечарником. Конструкція такого сельсина наведена на рис.16.13.
Рис. 16.13. Безконтактний сельсин ВЕІ
Статор 1 набирається з листової трансформаторної сталі з поперечним шихтуванням. В статорному пакеті розміщується трипроменева обмотка синхронізації 2. котушки однофазної обмотки збудження 3 у вигляді кілець, які утримуються поперечно шихтованими кільцевими тороїдами 4. Ротор складається з двох пакетів 5 та 6, які шихтовані подовжнім шихтуванням. Ротор сельсина має вал з немагнітної сталі 9. Основний повітряний зазор між ротором і статором та між кільцевими тороїдами й ротором не більше від 0.2÷0.3 мм. Шлях проходження магнітного потоку показано на рис.16.13 стрілками. Це два паралельних шляхи 5-1-6-4-8-4-5. Якщо скласти схему синхронної передачі на таких безконтактних сельсинах та розвернути ротор сельсина-датчика на деякий кут, то, завдяки подовжньому шихтуванню роторних пакетів 5 і 6 магнітний потік, пов'язаний з ротором датчика, повернеться на такий же кут. Це викличе зміну ЕРС в променях обмотки синхронізації. У всьому іншому електромагнітні процеси в схемах з безконтактними сельсинами аналогічні процесам в схемах з контактними сельсинами. Окрім розглянутих безконтактних сельсинів, існують сельсини з трансформаторним збудженням. Так у 1904р. Е.Тірман запропонував конструкцію такого сельсина, наведену на рис.16.14.
Рис. 16.14. Безконтактний сельсин з трансформаторним збудженням
Однофазна обмотка збудження сельсина 1 живиться від кільцевого однофазного трансформатора, який має первинну 2 та вторинну 3 обмотки. У 1939р. І.М.Садовський запропонував сельсин, який складається з двох машин, виконаних з різним числом полюсів, на одному валу та в одному корпусі. Обмотка статора однієї машини вмикається в мережу, а така ж обмотка іншої машини слугує обмоткою синхронізації. Двократною трансформацією енергія передається на вихід сельсина. Недоліками сельсинів з трансформаторним збудженням є великі втрати холостого ходу й збільшення аксіальних розмірів. Ці ж недоліки притаманні тією чи іншою мірою всім безконтактним сельсинам.
Магнесини
Недоліки контактних сельсинів сильно впливають при передачі кута на малі відстані з малим моментом опору виконавчого механізму. Звичайно до таких пристроїв додатково ставляться вимоги мінімальних габаритів та маси. В контактних сельсинах момент тертя може бути сумісним з моментом опору виконавчого механізму, що значно збільшує погрішність. Безконтактні сельсини розглянутих конструкцій також не можуть в цьому випадку бути застосовані у зв’язку з відносно великими габаритами й масою. Одним з рішень цієї задачі є застосування магнітоелектричних безконтактних сельсинів – магнесинів.
Рис. 16.15. Схема вмикання магнесинів
Уперше такі мікромашини були застосовані в 1942р. в авіаційному дистанційному компасі. Схема з’єднання магнесинів наведена на рис.16.15. Особливості конструкції магнесинів полягають у тому, що ротор виконується з двополюсного циліндричного постійного магніту, який намагніченій у діаметральному напрямі. Кільцева статорна обмотка, яка живиться однофазним змінним струмом, розташовується на тороїдному статорі, який шихтований з окремих пластин пермалою. Статор розташовується всередині циліндричного осердя (екрану) з листового пермалою. Це осердя відіграє подвійну роль: слугує для замкнення магнітного потоку при насиченні осердя статора й забезпечує однорідність магнітного поля навколо статора. Точки 1, 2, 3, до яких приєднуються лінії живлення та зв’язку, розташовуються під кутами 120º та рівномірно поділяють обмотку.
Рис. 16.16. Графіки магнітних залежностей в магнесині
В магнесині роль обмотки збудження відіграє постійний магніт-ротор. При живленні обмотки статора магнесина змінним струмом з частотою ƒ у тороїді осердя статора створюється змінний магнітний потік Фзб. На рис.16.16 наведено криву зміни цього потоку й низки інших величин, вважаючи їх синусоїдними. Оскільки пермалой має вузьку петлю гістерезису, можливо наближено вважати, що залежність між індукцією В та напруженістю Н магнітного поля є однією кривою (без гістерезису). Тому магнітна проникливість μ та магнітна провідність λ за період двічі досягають максимуму й мінімуму. Крім змінного потоку Фзб, по статорному опору замикається потік Фс, який створюється ротором (рис.16.15). Внаслідок того, що магнітна провідність λ змінюється з подвоєною частотою, потік Фс пульсує з тією ж частотою (рис.16.16). Ці пульсації магнітного потоку Фс індукують в обмотці статора ЕРС Ес з частотою 2ƒ.
В дійсності в наслідок насичення осердя статора виникають вищі гармоніки в кожній з кривих, наведених на рис.16.16. Якщо осі роторів датчика й приймача знаходяться в однаковому положенні відносно обмоток статорів, то точки 1, 2, 3 є еквіпотенціальними по відношенню як до напруги з частотою ƒ, так і до ЕРС Ес Тому струми в лініях зв’язку будуть відсутніми. В тому разі, коли ротор датчика повернеться на деякий кут, а ротор приймача останеться в попередньому положенні, струми з частотою ƒ по лініям зв’язку проходити не будуть, оскільки обмотки статорів для них остануться потенціально врівноваженими. В лініях зв’язку почнуть проходити струми подвоєної частоти, оскільки потенціали точок 1, 2, 3 залежать від положення ротора (від того, скільки витків кожної з ділянок 1-2, 2-3, 3-1 перетинається потоком Фс, який розгалужується).Зрівняльні струми з частотою 2ƒ взаємодіють з потоком Фс, створюючи синхронізуючий момент, який намагається як в датчику – так і в приймачі погодити положення роторів магнесина. Таким чином, в межах одного оберту магнесин має властивості самосинхронізації.
Диференціальний сельсин
У тих випадках, коли слідкуюча система повинна відпрацьовувати суму або різницю двох кутів, застосовують диференціальний сельсин. Конструктивно цей сельсин такий же, як трифазний асинхронний двигун з фазним ротором. В схемах синхронної передачі кута диференціальні сельсини можуть працювати або як приймачі, які працюють від двох датчиків, або як другі датчики. В останньому випадку такий сельсин може працювати не тільки в індикаторному, а й у трансформаторному режимі. Коефіцієнт трансформації диференціального сельсина звичайно дорівнює одиниці.
Рис. 16.17. Схема вмикання сельсина-диференціала в індикаторному режимі
На рис.16.17 наведена схема вмикання диференціального сельсина для роботи в індикаторному режимі. За цією схемою диференціальний сельсин може працювати датчиком або приймачем. Якщо ротор диференціального сельсина загальмувати, то він перетворюється на трансформатор, і передача кута стає звичайною при дещо збільшених активному та індуктивному опорах лінії зв’язку та θсд=0 (кут повороту ротора диференціального сельсина відносно сельсина-датчика). Якщо при цьому θсд≠0, то диференціальний сельсин працює другим датчиком. При повороті ротора диференціального сельсина в той же бік, в який повернуто ротор сельсина-датчика, приймач П відпрацьовує суму двох кутів
Якщо поворот ротора СД здійснюється в інший бік, то П відпрацьовує
Це пояснюється виникненням ЕРС, струмів та магнітних потоків в променях статора й ротора диференціального сельсина, які залежать від кутів повороту роторів Д та СД. Якщо задавати різні кути θд й θп, то в статорі й роторі диференціального сельсина будуть виникати два магнітних потоки, зсунутих один відносно одного на θ=θд±θп. При цьому «+» відповідає поворотові роторів Д та П в один бік, а «-» – у різні.
Потоки статора й ротора створюють на валу диференціального сельсина такий момент, який намагається повернути ротор СД на кут θ=θд±θп до співпадання осей потоків ротора й статора. Напрям повороту може бути змінений перемиканням будь-якої пари виводів обмотки ротора або статора диференціального сельсина. За допомогою диференціального сельсина можливо підсумовувати або віднімати два кутових повороти, кутові швидкості. Оскільки диференціальний сельсин безпосередньо не з’єднаний з джерелом живлення, його намагнічуючий струм проходить через сельсини, з якими він з’єднаний (через один або два). Звичайно намагнічуючий струм підводиться лише до обмотки статора диференціального сельсина. В цьому разі сельсин, через який проходить намагнічуючий струм диференціального сельсина, називають сельсином-збуджувачем. Він повинен бути розрахований на відповідне струмове навантаження.
|
|||||||||
|
|
Последнее изменение этой страницы: 2016-07-11; просмотров: 451; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.220.137.164 (0.032 с.) |

 ;
; ; (16.52)
; (16.52) .
.
 ;
; ; (16.53)
; (16.53)

 . (16.54)
. (16.54) .
. . (16.55)
. (16.55) ,
, . (16.56)
. (16.56) . (16.57)
. (16.57) . (16.58)
. (16.58) . (16.59)
. (16.59) . (16.60)
. (16.60)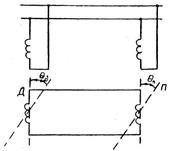

 ;
; (16.61)
(16.61) . (16.62)
. (16.62) , (16.63)
, (16.63) , (16.64)
, (16.64) . (16.65)
. (16.65)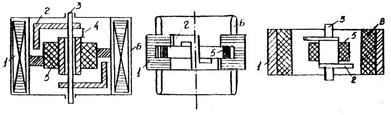






 .
. .
.


