Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Гидравлические насосы и двигатели
В системах гидроавтоматики для создания давления и расхода рабочей жидкости для гидроприводов, а также для преобразования напора рабочей жидкости в механическую энергию применяются поршневые роторные насосы и двигатели с аксиальным расположением цилиндров. Роторные насосы и двигатели являются механизмами обратимого действия, т. е. насос может работать как двигатель, если к нему подводить рабочую жидкость под давлением, а с вала снимать полезную мощность. Требование уменьшения массы и объема агрегатов гидросистемы обусловило применение высоких давлений и больших скоростей вращения насосов гидросистемы. Насосы создают давление рабочей жидкости 20...30 МПа при скорости вращения ротора до 5000 об/мин, обеспечивая скорость подачи жидкости от 4 до 90 л/мин. Кроме обеспечения необходимого давления и расхода (подачи) при минимальных массе и объеме насосы должны обеспечить на выходе минимальную пульсацию давления и расхода, чтобы не вызвать вибрационные напряжения в трубопроводах и агрегатах, а также надежно работать в широком диапазоне температур от -65 до 180 °С. Для обеспечения бескавитационной работы насосов давление жидкости на входе должно быть не менее 0,2 МПа. Обычно давление на входе обеспечивается за счет поддавливания, в результате которого в гидробаке поддерживается давление в диапазоне 0,3... 0,5 МПа. Поршневые (плунжерные) насосы с аксиальным расположением цилиндров могут быть разделены на две основные группы: поршневые насосы с наклонной (качающейся) шайбой, ось цилиндрового блока которых совпадает с осью входного вала, а ход поршня зависит от угла наклона опорной шайбы относительно входного вала; поршневые насосы с наклонным цилиндровым блоком, ось входного вала которых совпадает с осью опорной шайбы, а ход поршня зависит от угла наклона цилиндрового блока относительно оси входного вала. В обеих группах цилиндры блока вращаются относительно корпуса насоса, что позволяет просто осуществить торцевое распределение жидкости при входе ее в цилиндр и выталкивании жидкости из цилиндра поршнями. Число цилиндров в цилиндровом блоке колеблется от 7 от 9. Цилиндровый блок открытой стороной цилиндров скользит по неподвижному торцевому распределительному диску, на поверхности которого имеются два серповидных окна для входа и выхода жидкости. Серповидные окна расположены так, что распределительные перемычки между ними соответствуют крайним (мертвым) положениям поршней в цилиндрах. Ширина перемычки несколько больше диаметра отверстия в цилиндре. Схемы, поясняющие работу аксильно-поршневого насоса, показаны на рис. 13.2.
Подача насоса регулируется изменением угла наклона оси шайбы относительно цилиндрового блока. Угол наклона регулируется поворотом шайбы относительно цилиндрового блока либо, наоборот, наклоном цилиндрового блока относительно неподвижной опорной шайбы и изменяется от 5 до 20°. Поршневые насосы — качающие устройства объемного типа. Их теоретическая подача (рабочий объем) за один оборот равна объему, описываемому поршнями:
где d — диаметр цилиндра; h — ход поршня; z — число поршней в цилиндровом блоке. Теоретический объемный расход
где n — частота вращения ротора насоса.
На рис. 13.3 показан принцип работы аксиального насоса с автоматическим регулированием подачи за счет изменения угла наклона шайбы. Чувствительным элементом здесь служит мембрана 4, действующая при повышении давления выше заданного значения на клапан 5, управляющий давлением в правой полости силового цилиндра, поршень которого изменяет угол наклона опорной шайбы 3. При открытии клапана 5 давление в правой полости силового цилиндра 7, питающейся из полости нагнетания насоса через дроссельное отверстие 2 в поршне, снижается и поршень перемещается под действием давления в левой полости вправо, при этом подача насоса уменьшается. При закрытии клапана 5 давления в правой и левой полостях силового цилиндра 1 выравниваются и его поршень, перемещаясь влево под действием пружины и давления жидкости на неуравновешенную площадь поршня силового цилиндра 1, поворачивает опорную шайбу 3 в положение с максимальным углом наклона, а следовательно, устанавливает насос на максимальную подачу.
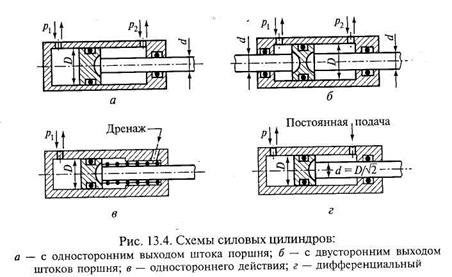
Силовые цилиндры
Силовой цилиндр является двигателем, преобразующим энергию жидкости или газа в механическую энергию перемещения поршня. Поршень в силовом цилиндре совершает возвратно-поступательное движение.
По конструкции силовые цилиндры можно объединить в следующие группы. Силовой цилиндр с односторонним выходом штока поршня (рис. 13.4, а). Движущее усилие на поршневом штоке при движении на выпуск штока
где р — рабочее давление (перепад давлений р1 и р2 вполостях цилиндра, разделенного поршнем, р = p1 – p2); f — рабочая площадь (площадь живого сечения) поршня
где D — диаметр поршня; d — диаметр штока. Если давление р2 на сливе значительно ниже давления р1 нагнетания и им можно пренебречь, то
где рн — давление нагнетания, рн = p1. Движущее усилие на поршневом штоке при движении на уборку штока
Если давлением слива (в этом случае р1) можно пренебречь, то
Силовой цилиндр с двусторонним выходом штоков поршня (рис. 13.4, б). Движущее усилие такого цилиндра
Усилие на штоках поршней при прямом и обратном ходе зависит только от перепада давлений на поршне. Силовой цилиндр одностороннего действия с одинаковым давлением в полостях цилиндра (рис. 13.4, в). Движущее усилие на поршневом штоке такого цилиндра при прямом ходе
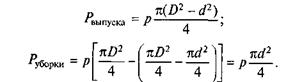
Возвратное движение поршня в данном случае осуществляется за счет пружины. Дифференциальный силовой цилиндр (рис. 13.4, г). При одинаковом давлении в обоих полостях цилиндра р1 = р2 = р. Тогда
Для того чтобы P выпуска = P уборки, необходимо выполнение следующего равенства:
откуда d = D / √ 2. При этом: максимальные усилия на выпуск и на уборку равны; при одинаковом давлении в полостях цилиндра поршень занимает любое промежуточное положение; рабочая площадь цилиндра На практике из-за механических потерь усилие на штоке поршня Р эф меньше величины Р, рассчитанной по формуле Р = pf:
где ηмех — механический КПД силового цилиндра, ηмех = 0,99...0,85 (среднее значение ηмех = 0,95). Скорость перемещения поршня гидравлического цилиндра зависит от расхода жидкости и площади живого сечения:
где Q — расход жидкости, поступающей в рабочий цилиндр; ηоб — объемный КПД силового цилиндра, учитывающий перетечку жидкости (при уплотнении металлическими кольцами ηоб = 0,98); f — площадь живого сечения поршня. Выход штока гидравлического цилиндра практически не зависит от нагрузки на штоке. Шток выходит плавно без толчков по мере расхода поступающей в цилиндр жидкости. Скорость выхода штока можно регулировать постановкой жиклера на входе в рабочую полость цилиндра. Условия работы пневматического цилиндра совершенно иные вследствие двух факторов: сжимаемости газа и различного усилия трения в уплотнении поршня (коэффициент трения покоя больше коэффициента трения движения). В пневматическом цилиндре шток выходит резко или с толчками даже при медленном нарастании давления в цилиндре.
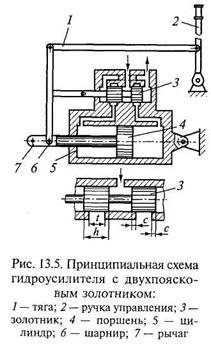
Гидравлические усилители
Гидравлическим усилителем называется устройство, перемещающее золотник или иное управляющее устройство гидравлического исполнительного механизма и одновременно усиливающее мощность входного сигнала. Гидравлический усилитель обеспечивает в системах регулирования однонаправленное прохождение сигнала от электромеханического преобразователя к выходному гидравлическому исполнительному механизму большой мощности.
Гидроусилители используются для построения высококачественных быстродействующих гидравлических и электрогидравлических следящих систем и систем автоматического регулирования. Давление жидкости в напорной магистрали гидроусилителей может варьироваться от 7 до 300 кг/см2. Вес гидроусилителей находится в пределах от 0,3 до 20 кг. Мощность потока жидкости, управляемая гидроусилителем, может изменяться в диапазоне от 1 до 206 кВт, а коэффициент усиления по мощности — в пределах 300... 300000. Гидравлический усилитель (бустер) имеет следующие преимущества перед другими усилительными устройствами: высокую чувствительность к перемещению входного звена управления; высокую скорость исполнения, практическое согласование динамики входного и выходного звеньев; большое развиваемое усилие, зависящее только от давления гидрожидкости и диаметра цилиндра исполнительного механизма. Для осуществления слежения в гидроусилителях применяется жесткая обратная связь выхода со входом так, что любое рассогласование приводит к равновесию, но уже в новом согласованном состоянии ведущего и ведомого звеньев. Принцип действия гидроусилителя основан на автоматическом поддержании согласования между входом и выходом и слежении выходного звена за входом, разность между которыми дает рассогласование, приводящее в действие исполнительный механизм, восстанавливающий согласование. Схема однокоординатного гидроусилителя с жесткой обратной связью выхода со входом, представлена на рис. 13.5. Принцип действия такого гидроусилителя заключается в следующем. При перемещении ручки управления 2 перемещается тяга 7. Так как золотник 3 легко перемещается, центр шарнира 6 в первый момент движения тяги 1 будет неподвижен, ввиду чего движение ручки управления вызовет через рычаг 7 смещение плунжера золотника 3.
В результате этого жидкость под давлением поступит в соответствующую полость цилиндра 5. Другая полость цилиндра через золотник 3 соединяется со сливом. Под действием давления жидкости произойдет перемещение поршня 4, а следовательно, и центра шарнира 6 выхода на некоторое расстояние, пропорциональное отклонению тяги) системы ручного управления. Если движение ручки управления 2 будет прекращено, то тяга 1 также остановится и движущийся поршень 4 сообщит через рычаг 7 плунжеру золотника 3 перемещение, противоположное тому, которое он получил до этого при смещении ручки. Так как окно золотника, имеющего размер /, вследствие обратного движения плунжера будет перекрываться, количество жидкости, поступающей в цилиндр 5, уменьшится и скорость поршня будет снижаться до тех пор, пока в среднем (нейтральном) положении золотника поступление жидкости не прекратится и поршень не остановится.
При движении ручки управления 2 в другую сторону движение всех элементов регулирующего устройства будет происходить в противоположном направлении. Реальный гидроусилитель отрабатывает заданное перемещение лишь после того как перемещен распределительный золотник, ширина пояска плунжера которого равна h. Это запаздывание происходит за счет перекрытия золотником проходных отверстий на величину с = (h - t)/2. Перекрытие образует основную «зону нечувствительности»; обычно оно минимально и равно 0,05 мм на сторону.
|
||||||||
|
|
Последнее изменение этой страницы: 2016-06-26; просмотров: 432; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.141.202.187 (0.031 с.) |









 .
.