
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Система комплексной автоматизацииСодержание книги
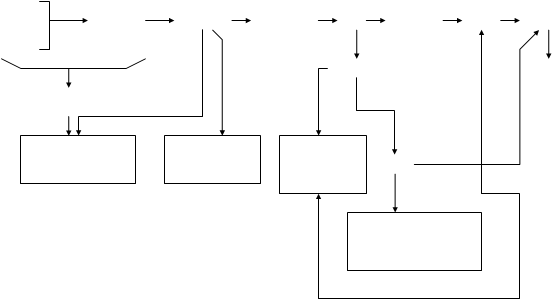
Поиск на нашем сайте Система комплексной автоматизации (СКА) Предназначена для управления различными судовыми объектами и судном в целом - это совокупность нескольких взаимосвязанных подсистем, объединённых общей системой управления. СКА принято разбивать на уровни. Каждый уровень характеризуется тем, что соответствующая ему система может функционировать независимо от систем более высокого уровня. ОУ - объект управления; АП - автоматизированный привод; РУ - ручное управление; К - командо-контроллер; С - сигнализатор (лампа, звук). МПУ - местный пост управления; Д - датчик; УК - управляющий комплекс; ССУ - система связного управления; СОН - система обработки информации; СК - система контроля; ПУЛС - пульт управления локальной системой; УО - управляющие органы; СПИ - система представления информации; УС - управляющая система; ЦПУ - центральный пост управления; АОУ - автоматизированный объект управления.
Пример УК ЛАСУ противопожарной системы: осушительная система система баланса На современном этапе автоматизации системы управления являются независимыми друг от друга. Системы: 1. система управления энергетическими установками; 2. общесудовые системы (противопожарные); 3. система управления курсом судна; 4. система управления якорно-швартовыми и буксирными механизмами; 5. система управления грузоподъёмными механизмами (на СГ). Каждую из систем обслуживает УК ЛАСУ.
Схемы управления э/п нагнетателей
Схема на переменном токе. Применён АД с КЗ ротором. Схема управления: основывается на схеме магнитного пускателя. Предусмотрено как ручное так и автоматическое управление. Для переключения рода управления имеется переключатель П с тремя секциями (П1,П2,П3). Ручное управление - в чистом виде схема магнитного пускателя. Она содержит лин. контактор Л. При автоматическом управлении чувствительным элементом схемы является монометрическое реле давления РД. Его контакты заменяют кнопочную станцию. Вместо кнопки «Пуск» КНП работает контакт РД min, вместо кнопки «Стоп» КНС работает контакт РД max. Эта схема применяется для привода сан. насоса - для обеспечения запаса воды в расходной цистерне. Может быть использована для других приводов.
Работа схемы: (ручное управление) [автоматическое аналогично]. Для пуска двигателя (т.е. и насоса) нажимаем КНП, получает питание катушка Л -- По цепи Л2—ПР—П1—КНС—КНП—П3—1РТ—Л—2РТ—ПР—Л3. Замыкаются контакты Л в фазах двигателя, а двигатель и насос начинают работать. КНС - норм. закрытая. Все контакты с возвратом.
Замыкается также контакт Л параллельно КНП, катушка Л становится на самопитание через этот блок-контакт Л, кнопка КНП может быть отпущена. Для остановки - нажимается КНС, цепь питания катушки Л разрывается, размыкаются все контакты Л. Защиты в схеме. 1. От КЗ: выполнена с помощью автоматического выключателя на ГРЩ (для защиты фидера и самого привода). 2. От перегрузок с помощью тепловых реле 1РТ, 2РТ (биметаллическая пластина). Тепловое реле: с непосредственным нагревом с косвенным При перегреве нагревается биметаллическая пластина, она изгибается, контакты размыкаются (сама пластина воздействует на контакт). 3. Нулевая защита (защита от самозапуска; минимальная защита (по напряжению)). Реализовано на основе шунтирования КНП блок-контактом Л. Действие нулевой защиты: при падении напряжения или его исчезновения питание Л исчезает, контакты Л размыкаются, привод отключается. При появлении напряжения привод сам не запускается, пока не будет нажата КНП (нет самозапуска).
Схема 3 Схема 4 Схема ЭП мощного пожарного насоса
Мощность ЭД пожарного насоса может достигать 10-20% от установленной мощности электростанции. Здесь приняты меры для ограничения провалов напряжения при пуске (через ограничивающие сопротивления). Ограничивают величину пускового тока (провалов напряжения). Мощность R расчитана только для пуска, они могут работать только кратковременно, (доли секунд); потом они выводятся из работы. Основа схемы - магнитный пускатель. В схеме приняты меры для ограничения времени работы сопротивлений, если они не выведены, то привод отключается. Схема О.Б. надёжна и поэтому в рабочем режиме под напряжением только 2 кат. Нет предохранителей в силовой цепи, есть предохранители в цепи управления для защиты от К.З. ВУ - выключатель управления. УР - ускоряющее реле. Л - линейный контактор. Лампы говорят о состоянии линейного контакта Л. КнС - последовательно включен. КнП - параллельно включен. РУ - реле ускорения. ВПС - выпрямитель селеновый. СШ - сопротивление шунтирующее.
Описание работы схемы (в условных записях её работы). Включённое состояние аппарата: + Выключённое состояние аппарата: - Воздействие одного аппарата на другой: ® Выдержка времени: Dt
+УР + У -РУ Dt - РБ Dt - УР
+ КНП (нажимаем) +ЛР -У
+РБ
Контакты РБ и У Пуск ЭД шунтир-е конт. шунтируют КнП через резисторы Ц и РУ +Л откл. ВпС
Шунтирование пусковых резисторов.
В конце пуска включены только ЛР и Л. Замыкание контакта У после отключения контактора У в цепи катушки РУ не приводит к повторному включению РУ. Блокировки в схеме. 1. Если контактор Л не включится, то ЭД отключится в следствии работы цепи -РБ ® Dt ® -УР ® -У Это предохраняет пусковые резисторы от выгорания, т.к. они не расчитаны на длительный режим. 2. Пуск возможен, если РУ успешно сработает при включении ВУ. Если бы РУ не сработало, а контактора блокировки РУб не было, то при нажатии КнП произошёл бы прямой пуск двигателя и работы цепи +УР ® +У ® +ЛР ® +Л. Защиты в схеме: · от КЗ - автомат на ГРЩ; · нулевая - питание ЛР через собственный контакт ЛР (от самозапуска); · от перегрузок - тепловое реле РТ.
Лопастная машина
На рисунке изображена система управления рулём следящего действия, которая обеспечивает отработку углов aзад. Машина соединяет 3 лопасти. 1 - Корпус вертикальный цилиндр. 2 - Лопасти. 3 - Ось баллера. Лопасти находятся в секторах цилиндра. Каждый сектор разделён на две полости: a и в. Одна полость соединена с подающим трубопроводом (нагнетающим, другая с отсасывающим). Масло закачивается в полость «а», давит на лопасть и поворачивает её по часовой стрелке, при этом из полости «в» масло отсасывается. Регулировка подачи масла регулируется золотниковым устройством (цилиндр с поршнями). Лопастная машина меньше по весу, объёму, создаёт большой момент балера. Цена лопастной машины выше, однако и надёжность тоже выше. Радиально-поршневой насос
а) Нулевая производительность Q (насос работает, нет движения масла). б) Ìàêñèìàëüíàÿ производительность Q. в) Максимальная производительность Q (противоположное движение масла).
1 - Цилиндр. 2 - Поршень. 3 - Ползуны. 4 - Кольцо. Ползуны, вместе с цилиндрами и поршнями, могут вращаться внутри кольца от электродвигателя. Поршень с ползуном соединены шарнирно. 5 - Верхняя полость. 6 - Нижняя полость. 7,8 - Манипулятор (тяга). С помощью манипулятора кольцо 4 может смещаться внутри корпуса влево или вправо. Рис. б - влево смещено кольцо относительно корпуса. Рис. в - кольцо смещено вправо. Рис. а - направление вращения системы. Электродвигатель асинхронный с короткозамкнутым ротором. Двигатель вращает цилиндры в одном направлении с постоянной скоростью. Рис. а. Поршни в цилиндрах не вращаются (три верхних цилиндра имеют соединение с верхней полостью 5). Когда они внизу - соединение с нижней полостью 6. Бывает когда цилиндры соединены с перегородкой. Общие объёмы цилиндров и полостей неизменны, следовательно, нет вращения масла. Рис. б. Кольцо смещено влево, ось вращения в пространстве неизменна, при вращении системы по часовой стрелке четыре поршня (слева) вышли из цилиндров, два правых поршня - максимально вошли в цилиндр. Поршни, занимая верхнее положение, входят в цилиндр, закачивая в верхнюю полость 5 масло. Поршни, занимая нижнее положение, выходят из цилиндров, выкачивая из нижней полости 6 масло. Рис. в. Масло закачивается в цилиндры из верхней полости 5 и нагнетается в полость 6. Полости 5 и 6 соединены трубопроводами. Производительность меняется за счёт величины смещения кольца (это эксцентриситет). Направление движения масла меняется за счёт направления эксцентриситета. Здесь 5-7 цилиндров.
Перечень сил. Т = МБ/R*hБ - основная сила, приложенная к оси румпеля (её радиус действия R). Тfp - сила трения, возникающая при скольжении круглого румпеля в муфте и направленная против движения муфты по румпелю. f - коэффициент трения. Nfc - сила трения плунжеров в сальниках цилиндров, определяется реакцией опор относительно плунжеров. Направлена против движения плунжеров. Р - реакция со стороны упорного бруса относительно составляющей Тx силы Т. Обеспечивает упор и предотвращает возможность прогиба линии плунжеров. Рfп - сила трения, возникающая при движении ползуна по упорному брусу. В - сила трения в сальниках цилиндров, обусловленная упругостью набивки и степени её сжатия в зависимости от действующих давлений. При больших гидравлических давлениях применяются самоуплотняющиеся набивки, которые повышают степень уплотнения с ростом давления. Набивка - часть сальника
Цилиндр Набивка
Давление масла
hн Д Плунжер
На кольцо давит масло, которое давит на набивку и она прижимается к плунжеру.
Fц - действующая сила в следствии давления масла в цилиндрах. Сила компенсирует полную силу сопротивления Fc и обеспечивает перекладку руля. Вся сумма векторов сил сопротивления равна Fc.
Насос радиально-поршневой. 1 - предохранительный клапан максимального давления; 2 - вентиль отключения подачи масла в цилиндр; 3 - запасной бак с маслом; 4 - вентили трубопроводов насоса; 5 - манипулятор; 6 - насос; 7 - червячная передача; 8 - двигатель; 9 - винт; 10 - гайка; 11 - генератор; 12 - двигатель насоса; 13 - рычажный дифференциал; 14 - тяга обратной связи; 15 - демпфирующая пружина; 16,17 - датчик и приёмник следящей системы; 18 - плунжер; 19 - муфта; 20 - перо руля; 21 - румпель; 22 - ручное аварийное управление (тросовая передача).
Работа схемы: При повороте датчика поста управления на заданный угол, начинает работать система Г-Д. Двигатель 8 через червячную передачу 7 вращает винт 9. По винту 9 начинает двигаться гайка 10, смещающая верхний конец рычажного дифференциала 13 из точки С в точку С1. Так как баллер в первый момент не подвижен, то нижний конец рычажного дифференциала 13 остаётся в точке а. Смещение верхней точки рычага в точку С1 приводит к смещению средней точки рычага из точки в в в 1, тем самым перемещая манипулятор 5 насоса переменной производительности. Насос начинает работать, масло перемещается, руль перекладывается. Начинает действовать обратная связь от баллера к приёмнику (через цепную передачу) и обратная связь от баллера через тягу 14 к нижнему концу дифференциала 13. Когда баллер повернётся на угол, при котором приёмник займёт положение даьчика, двигатель 8 остановится, гайка 10 перестанет перемещаться по винту 9. Следящая система закончила свою работу. Наступает согласование на электрической стороне. Но дифференциал 13 ещё смещён, насос работает, перекладка руля идёт. За счёт тяги 14 нижний конец дифференциала перемещается из точки а в точку а1, тем самым манипулятор 5 возвращается из точки в1 в точку в. Когда точка в будет достигнута, насос выключается, масло в цилиндры не поступает, заданный угол отработан, наступает согласование на гидравлической стороне.
Система комплексной автоматизации (СКА) Предназначена для управления различными судовыми объектами и судном в целом - это совокупность нескольких взаимосвязанных подсистем, объединённых общей системой управления. СКА принято разбивать на уровни. Каждый уровень характеризуется тем, что соответствующая ему система может функционировать независимо от систем более высокого уровня. ОУ - объект управления; АП - автоматизированный привод; РУ - ручное управление; К - командо-контроллер; С - сигнализатор (лампа, звук). МПУ - местный пост управления; Д - датчик; УК - управляющий комплекс; ССУ - система связного управления; СОН - система обработки информации; СК - система контроля; ПУЛС - пульт управления локальной системой; УО - управляющие органы; СПИ - система представления информации; УС - управляющая система; ЦПУ - центральный пост управления; АОУ - автоматизированный объект управления.
Пример УК ЛАСУ противопожарной системы: осушительная система система баланса На современном этапе автоматизации системы управления являются независимыми друг от друга. Системы: 1. система управления энергетическими установками; 2. общесудовые системы (противопожарные); 3. система управления курсом судна; 4. система управления якорно-швартовыми и буксирными механизмами; 5. система управления грузоподъёмными механизмами (на СГ). Каждую из систем обслуживает УК ЛАСУ.
|
||
|
|
Последнее изменение этой страницы: 2016-06-23; просмотров: 196; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.217.39 (0.009 с.) |

 + ВУ ® + РУ
+ ВУ ® + РУ Уплотнительное кольцо
Уплотнительное кольцо


