
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Исследование индуктивных и трансформаторных преобразователей перемещенияСтр 1 из 4Следующая ⇒
ЛАБОРАТОРНАЯ РАБОТА № 2 Лабораторная работа № 3 ИССЛЕДОВАНИЕ МОМЕНТНЫХ ПРЕОБРАЗОВАТЕЛЕЙ
Цель работы
Целью настоящей работы является: изучение принципов построения магнитоэлектрических и индукционных моментных преобразователей, экспериментальное определение функции преобразования (ФП), выявление основных источников статической погрешности и определение их влияния на функции преобразования обоих типов преобразователей.
Теоретическая часть
3.2.1 Общие сведения о моментных преобразователях Моментные преобразователи являются исполнительными элементами, создающими необходимые моменты в измерительных устройствах, построенных по уравновешивающей схеме. Наибольшее распространение моментные преобразователи нашли в гироскопических устройствах, в которых их часто называют моментными датчиками (в системах коррекции гироприбора) или стабилизирующими двигателями (в гиростабилизаторах). Моментные преобразователи подразделяются на электрические и пневмогидравлические. Электрические, в свою очередь, можно разделить на электромагнитные, магнитоэлектрические, ферродинамические и индукционные. Наибольшее применение нашли магнитоэлектрические и индукционные моментные преобразователи, обладавшие большой линейностью и стабильностью характеристик. Так же как и управляемые электродвигатели, моментные преобразователи работают в заторможенном режиме, но отличаются тем, что имеют ограниченный угол поворота (кроме индукционных) и должны обеспечивать длительную работоспособность с допустимым значением перегрева при максимальном входном сигнале.
3.2.2 Магнитоэлектрические моментные преобразователи В магнитоэлектрических моментных преобразователях вращающий момент создается в результате взаимодействия магнитного поля постоянного магнита с магнитным полем катушки созданным управляющим током. Преобразователи выполняются как с подвижной катушкой, так и с подвижным магнитом. В преобразователях первой разновидности подвижная катушка располагается в зазоре между магнитом и магнитопроводом, которые неподвижны. Магнитопровод служит для уменьшения сопротивления магнитной цепи, тем самым увеличивается магнитная индукция в зазоре, следовательно, и чувствительность преобразователя. В случае внешнего расположения магнитопровода (рис. 1а) выполняет роль экрана, который предохраняет преобразователь от влияния внешних
постоянных полей.
Рис. 1 Схема внешнего (а) и внутреннего (б) расположения магнитопроводов
Конструктивная схема с подвижным магнитом не отличается от схемы с подвижной катушкой, при этом подвижным может быть только магнит или магнит с экраном (рис.2).
Рис.2 Схема с подвижным магнитом С целью повышения чувствительности преобразователя увеличивают число пар полюсов магнита и соответственно число пар катушек. На рис. 3а показана конструктивная схема преобразователя с тремя парами полюсов, а на рис. 3б - электрическая схема одного из вариантов соединения катушек обмотки.
а) б) Рис.3 Схема моментного преобразователя
Катушки выполняются бескаркасными и приклеиваются к поверхности цилиндра (рис. 3а) или сектора (рис. 2) из легко магнитного материала. Цилиндр (сектор) одновременно выполняет в этом случае и роль демпфера. Иногда изготовляют обмотку и без металлического цилиндра, катушки в этом случае заливают эпоксидной смолой и они образуют цилиндрическую поверхность. Для определения ФП, представляющей зависимость между управляемым током и выходным моментом, воспользуемся законом электромагнитного взаимодействия. Сила взаимодействия между магнитом и проводником с током, расположенным перпендикулярно магнитному полю, равна:
где В – магнитная индукция; L – активная длина проводника (т.е. длина проводника, находящегося в основном потоке постоянного магнита); I – сила тока. В приведенных конструктивных схемах обе противоположные стороны катушек являются активными, следовательно, вращающий момент определится следующим выражением:
где W – число витков катушки; n – количество катушек обмотки;
Из полученного выражения момента видно, что при постоянной индукции во всех точках зазора имеем линейную ФП и чувствительность S:
Чувствительность не зависит от углового положения ротора относительно статора. Практически удается получить постоянство индукции только в ограниченном диапазоне углов, при этом для системы с внешним магнитом этот угол получается большим, чем с внутренним. Неоднородность индукции в зазоре объясняется не только ограниченными размерами полюсов, но и эксцентриситетом, технологическими отклонениями формы магнита и магнитопровода от цилиндрической, магнитной неоднородностью магнитопровода. При подвижном магните в этом случае появляется «нулевой» момент (возникающий при нулевом входном сигнале), так как сопротивление магнитной цепи будет зависеть от углового положения магнита относительно неподвижного магнитопровода. «Нулевой» момент при подвижном магните возникает также из-за остаточной намагниченности магнитопровода. Поэтому для уменьшения «нулевого» момента целесообразно делать подвижным магнит с магнитопроводом. В тех случаях, когда необходимо иметь подвижную часть малоинерционной, ее выполняют с подвижными катушками. Здесь также может возникнуть «нулевой» момент из-за гибких токопроводов.
3.2.3 Индукционные моментные преобразователи
Индукционные моментные преобразователи представляют собой двухфазные асинхронные двигатели с короткозамкнутым ротором, работающие в заторможенном режиме и имеющие много общего с управляемым асинхронным двигателем. Отличие от управляемых асинхронных двигателей определяется тем, что моментные преобразователи в основном работают без редукторов и поэтому не имеют подшипниковых узлов, а выполняются в виде двух разделенных частей: статора и ротора, которые закрепляются на неподвижные и подвижные части измерительного устройства, например, гироскопического. На статоре преобразователя располагаются две смещенные в пространстве на 90 градусов обмотки возбуждения (
Рис. 4 Схема моментного индукционного преобразователя
Ротор преобразователя выполняется в виде немагнитного полого стакана (рис. 5а) или диска, либо обмедненного ферромагнитного цилиндра. В этом случае получается наибольшая его электрическая симметрия и уменьшается «нулевой момент».
а) б) в) Рис. 5 Различные варианты роторов МП
Для увеличения чувствительности иногда применяют ротор типа беличья клетка, выполненный как и у обыкновенных асинхронных двигателей из шихтованной стали, но при этом для уменьшения «нулевого момента» обмотки ротора должны иметь сравнительно большое активное сопротивление. Обмотка возбуждения В результате этого обмотки образуют элептически вращающееся магнитное поле, которое при взаимодействии с коротко замкнутым ротором создает вращающий момент. Величина момента при насыщенной магнитной системе определяется по формуле:
где Обозначим через ( тогда:
где
Номинальный момент преобразователя
где m – количество фаз питающего напряжения; p – число пар полюсов статора;
Индукционные магнитные преобразователи нашли широкое применение в связи с их достоинствами; возможностью получения независимости величины момента от положения ротора в пределах одного оборота, что недостижимо для преобразователей других типов; хорошей линейностью ФП.
Рис. 6 Функция преобразования МП
Основные недостатки индукционных преобразователей – невысокое значение выходного момента, особенно с немагнитным ротором, и трудность обеспечения достаточно малого «нулевого момента». Так как моментные преобразователи работают в заторможенном режиме, основными причинами, вызывающими «нулевой момент», являются паразитные короткозамкнутые витки в магнитопроводе. Вследствие этого поток возбуждения получает дополнительный фазовый сдвиг, приводящий к образованию вращающегося магнитного поля, т.е. «нулевого момента» Выполнение ротора с большим активным сопротивлением позволяет повысить электрическую симметрию преобразователя, следовательно, несколько уменьшает и «нулевой момент», но при этом уменьшается и его чувствительность. Для уменьшения «нулевого момента» необходима тщательная сборка магнитопровода. В исполнительных асинхронных двигателях роторы также выполняются с повышенным активным сопротивлением. Это делается с целью устранения самохода двигателя, т.к. исполнительные двигатели должны быть управляемыми и при отсутствии входного сигнала (при включенной обмотке возбуждения) двигатель должен остановиться. В точных моментных преобразователях для повышения температурной стабильности, чувствительности используется токопроводящее покрытие ротора металлом с малым коэффициентом сопротивления, например, манганином, но такое покрытие по сравнению с медным снижает чувствительность преобразователя. Иногда для той же цели применяют схемные методы.
Требования к отчету
Отчет должен содержать: 1. цель работы. 2. схему лабораторной установки. 3. результаты измерений сведенные в таблицы. 4. графики, построенные по результатам измерений и вычислений.
5. выводы.
3.6 Контрольные вопросы
1. Чем отличаются моментные преобразователи от исполнительных двигателей? 2. Какой характер получившихся погрешностей у исследованных преобразователей? 3. Каким образом можно уменьшить «нулевые» сигналы исследуемых преобразователей? 5. Почему наблюдается нелинейная зависимость момента у индуктивного моментного преобразователя? ЛАБОРАТОРНАЯ РАБОТА № 4 ИССЛЕДОВАНИЕ ТАХОГЕНЕРАТОРОВ ПОСТОЯННОГО И ПЕРЕМЕННОГО ТОКА
Цель работы
Целью работы является изучение принципов действия тахогенераторов постоянного и переменного тока; ознакомление с их конструкциями; экспериментальное определение скоростных характеристик тахогенераторов.
Теоретическая часть
4.2.1 Общие сведения о тахогенераторах
Тахогенераторы предназначены для измерения угловых скоростей вращения и конструктивно представляют собой генераторы постоянного или переменного тока. В отличие от обычных генераторов у тахогенераторов выходное напряжение В зависимости от выполняемой функции в тахогенераторах допускаются различные погрешности от нелинейности и стабильности характеристики. Наименьшую нелинейность характеристики (0.05 ¸ 0.1 %) должны иметь тахогенераторы – элементы счетно-решающих устройств, которые выполняют операции дифференцирования и интегрирования. Для дифференцирования какой-либо функции необходимо поворачивать ротор тахогенератора на углы, пропорциональные величине этой функции, тогда выходное напряжение будет пропорционально производной от этой функции. Передаточная функция тахогенератора в этом случае имеет вид реального дифференцирующего звена:
где К – крутизна ЭДС тахогенератора в мВ/(об/мин); Т – постоянная времени, определяемая в основном скоростью протекания электромагнитных процессов в машине, т.е. активными и реактивными сопротивлениями выходной обмотки и нагрузкой (электромеханической постоянной времени, обусловленной инерцией полого ротора тахогенератора, обычно пренебрегают). Для интегрирования функции по времени надо преобразовать её в электрическое напряжение и вращать ротор так, чтобы ЭДС его генераторной обмотки в любой момент времени компенсировала это напряжение. Тогда угол поворота ротора будет пропорционален величине интеграла по времени от данной функции.
4.2.2 Тахогенераторы постоянного тока
Тахогенераторы постоянного тока представляют собой коллекторный генератор постоянного тока. Выполняются с независимым возбуждением (рис. 1а) или с возбуждением постоянным магнитом (рис. 1б). При неизменном токе возбуждения J В, т.е. при неизменном потоке Ф, ЭДС тахогенератора пропорциональна скорости вращения:
(2.2.2)
где Ce – постоянная тахогенератора, определяемая конструкцией;
n – скорость вращения в об/мин.
а) б) Рис. 1 Тахогенераторы постоянного тока: а – независимое возбуждение, б – возбуждение постоянным магнитом При нагружении тахогенератора сопротивлением R н его выходное напряжение
где R 0 – сопротивление якорной обмотки, включая и сопротивление щёточного контакта. Из уравнений (2.2.2), (2.2.3) находим уравнение выходной характеристики тахогенератора:
где выражение
крутизна выходного напряжения. Часто под крутизной выходного напряжения принимается число вольт приходящееся на 1000 об/мин. В малых тахогенераторах специального назначения эта величина составляет 3 ¸ 5 В, а в тахогенераторах общего применения – 50 ¸ 100 В и более. Диапазон измеряемых скоростей вращения тахогенератора постоянного тока составляет 0 ¸ 10000 об/мин. В идеализированном случае (Ф – const, Практически выходная характеристика отклоняется от линейного закона в результате размагничивающего действия реакции якоря, наличия нелинейного сопротивления в переходном контакте между коллектором и щётками и изменения тока возбуждения при её нагреве. Для уменьшения влияния размагничивающего действия реакции якоря желательно иметь в цепи нагрузки большое сопротивление Нелинейный характер сопротивления щёточного контакта также создаёт погрешность, т.к. падение напряжения под парой щёток (2D U Щ) можно приблизительно считать постоянным, не зависящим от тока нагрузки. Поэтому в области малых скоростей тахогенератор становится нечувствительным к изменению скорости вращения (рис.3). Для уменьшения погрешности, создаваемой 2D U Щ, в тахогенераторах применяют металлографические щётки, у которых величина 2D U Щ очень мала. В прецизионных тахогенераторах, предназначенных для счётно-решающих устройств, щётки изготавливают с серебряными и золотыми напайками, поэтому погрешностью от 2D U Щ можно пренебречь.
Рис. 2 Выходные характеристики тахогенератора
Рис. 3 Нулевой сигнал тахогенератора
Нагревание обмоток возбуждения тахогенератора приводит к уменьшению потока возбуждения, следовательно, к уменьшению выходного напряжения. Для стабилизации крутизны применяют при независимом возбуждении сильно насыщенную магнитную систему. В тахогенераторах с возбуждением постоянными магнитами изменения температуры окружающей среды оказывают меньшее влияние на величину магнитного поля магнитов. Большим достоинством тахогенераторов постоянного тока является отсутствие фазовой погрешности. К недостаткам их относятся: сравнительно большие вес и стоимость, нестабильность выходной характеристики из-за наличия скользящего контакта, пульсация выходного напряжения и радиопомехи. В общем случае различают скоростные, якорные, зубцовые и коллекторные пульсации выходного напряжения. Наименьшие пульсации у малогабаритных тахогенераторов с полым бескаркасным якорем, которые имеют меньшую механическую инерционность и улучшенные условия коммутации благодаря малому значению индуктивности обмотки якоря.
4.2.3 Асинхронные тахогенераторы По конструктивному исполнению асинхронный тахогенератор подобен асинхронному двигателю с немагнитным полым ротором. Он состоит из статора и неподвижного сердечника ротора, между которыми в воздушном зазоре вращается тонкостенный немагнитный полый цилиндр (рис.4). На статоре генератора помещаются две однофазные обмотки, взаимно сдвинутые по его окружности на половину полюсного шага (на 90 электрических градусов). Одна из обмоток включается в сеть переменного тока напряжением U В и называется обмоткой возбуждения – wВ, а другая с числом витков wГ – генераторной. Взаимная индукция между этими обмотками отсутствует вследствие взаимной перпендикулярности их осей, поэтому при неподвижном роторе – цилиндре в генераторной обмотке ЭДС отсутствует. При вращении ротора с угловой скоростью d a/ dt его образующие пересекают пульсирующее магнитное поле ФВ возбуждения и в них возникает ЭДС вращения. Эта ЭДС вызывает в роторе ток Jq, создающий по оси генераторной обмотки пульсирующее поперечное поле Ф q . Поле Ф q, пульсируя с частотой напряжения возбуждения – U В , индуцирует в генераторной обмотке ЭДС, амплитуда которой пропорциональна скорости вращения цилиндра.
Рис. 4 Схема асинхронного тахогенератора
На рис.5 представлены кривые выходной характеристики
Рис. 5 Выходная характеристика асинхронного тахогенератора
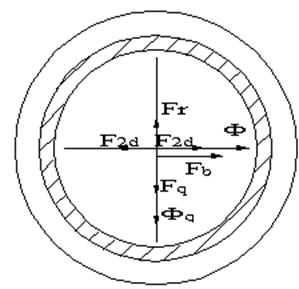
В идеализированном тахогенераторе выходная характеристика линейная (кривая 1). В реальных тахогенераторах эта зависимость отклоняется от линейной (кривая 2), т.е. появляется амплитудная погрешность. Причинами отклонения выходной характеристики от линейной зависимости являются: а) технологические неточности при изготовлении; б) электромагнитная реакция ротора, изменяющая величину потоков ФВ и Ф q при изменении режима работы тахогенератора (скорости вращения и нагрузки); в) изменение сопротивления полого ротора при изменении скорости вращения; г) изменение сопротивления обмоток и магнитного сопротивления машины по различным осям под влиянием температуры, насыщения и др. Из-за технологических неточностей при изготовлении тахогенераторов (отклонения обмоток статора wВ и wГ от взаимно - перпендикулярного положения, неравномерность воздушного зазора и толщины полого ротора, неоднородность структуры магнитных материалов и т.д.) в генераторной обмотке при неподвижном роторе индуктируется некоторая остаточная ЭДС, называемая нулевым сигналом. Нулевой сигнал, обусловленный неточным взаимным расположением обмоток wВ и wГ, может быть уменьшен размещением обмоток на разных элементах магнитопровода, например wВ на внешнем статоре, wГ на внутреннем (сердечнике). Это даёт возможность поворотом сердечника установить минимальный нулевой сигнал. Другие методы уменьшения нулевого сигнала основаны на компенсации остаточного ЭДС или остаточной намагничивающей силы. Полностью устранить нулевой сигнал указанными методами не удаётся из-за неравномерности толщины полого ротора, т.к. эта неравномерность приводит к электрической асимметрии ротора и величина остаточной ЭДС будет зависеть от углового положения ротора. При рассмотрении идеализированного тахогенератора предполагалось, что величина потока ФВ остаётся неизменной при всех режимах работы. В действительности этот поток изменяется при изменении нагрузки в генераторной обмотке. Асинхронный тахогенератор можно рассматривать как трансформатор с вращающейся короткозамкнутой вторичной обмоткой, в которой кроме трансформаторной ЭДС от пульсации поля возбуждения ФВ индуктируется ещё ЭДС вращения от пересечения этого поля образующими цилиндра. Тонкостенный цилиндр представляет собой равномерно распределённую обмотку и не имеет определённой фиксированной магнитной оси. Под действием поперечного потока ФВ в элементах полого ротора индуктируется ЭДС вращения e ¢ u и возникают токи i ¢ u, которые распределены относительно осей машины так же, как и токи, создаваемые трансформаторными ЭДС. При этом появляется добавочная продольная составляющая намагничивающей силы ротора F 2 d, изменяющая ток возбуждения J 1 (рис. 6а).
Рис. 6а Расположение магнитного потока тахогенератора
Рис. 6б Расположение выходного напряжения тахогенератора
В результате изменяется ЭДС возбуждения E В, продольный поток – ФВ и ЭДС в генераторной обмотке:
 , ,  – соответственно активная и индуктивная составляющая сопротивления обмотки возбуждения; – соответственно активная и индуктивная составляющая сопротивления обмотки возбуждения;
где При подключении к выходной обмотке нагрузки по ней протекает ток J г, который создаёт некоторую н.с. Frq. Результирующая н.с. по поперечной оси Fq = F 2 q 1+ F 1 q, т.е. она будет отличаться от н.с. F 2q1 при холостом ходе. Кроме того, выходное напряжение тахогенератора под нагрузкой будет меньше, чем при холостом ходе, за счёт падения напряжения в обмотках генератора.
где k – коэффициент пропорциональности; n= n / n 1 – относительная скорость вращения; n 1 – синхронная скорость; A, B – комплексные коэффициенты, зависящие от параметров схемы тахогенератора. Из (2.2.8) следует, что для уменьшения погрешности от нелинейности нужно уменьшить член Вn2,вызывающий отклонение от линейной зависимости. Для этого тахогенераторы выбирают с большой синхронной скоростью, частота питающей сети 400 ¸ 1000 Гц, а измеряемая скорость не должна превышать n = 0.2 ¸ 0.3.
(2.2.9)
где r 2 – активное сопротивление ротора; r 1 – полное (приведённое) сопротивление обмоток статора. Следовательно, уменьшение погрешности может быть достигнуто путём увеличения r2, Z H и уменьшения Z 1. Для этой цели необходимо работать при Z H»¥, т.е. при режиме холостого хода, а полый ротор выполняют обычно из материалов с большим электрическим сопротивлением, чем в исполнительных двигателях. Кроме того, увеличивают сечение проводов обмоток статора. В асинхронных тахогенераторах погрешность выходной характеристики является комплексной величиной, т.е. при изменении скорости вращения тахогенератора Е г представляет собой геометрическую сумму нулевого сигнала Е г0 и ЭДС вращения Евр, при этом фазовая погрешность Djr тем больше, чем меньше скорость вращения. Существенное влияние на точность АТ оказывает изменение сопротивления машины при её нагреве во время работы. В основном оно вызывается нагревом ротора. Для устранения температурной погрешности в тахогенераторах большой мощности ротор выполняют из материалов с низким температурным коэффициентом сопротивления или применяют специальную температурную компенсацию. Полная погрешность тахогенераторов при максимальной рабочей скорости обычно составляет 0.1¸ 2.5 %. В тахогенераторах, служащих для измерения скорости вращения и для выработки ускоряющих и замедляющих сигналов, основное значение имеет амплитудная погрешность; при использовании же их в качестве дифференцирующих звеньев они должны иметь минимальную как амплитудную (0.05 ¸ 0.3%), так и фазовую (не более 0.1°) погрешности. В современных АТ крутизна выходной характеристики S = dU вых/ dn составляет 1 ¸10 мВ/(об/мин). Величина нулевого сигнала обычно не превышает 0.1% от максимального значения выходного напряжения и составляет 25 ¸ 100 мВ; переменная составляющая её D Е 0 = Е 0max – Е 0min, изменяющаяся при различных положениях ротора, не превышает 0.7 мВ. Максимальная рабочая скорость n max достигает 8000 ¸ 10000 об/мин, а относительная скорость
Очень часто АТ, также как и тахогенераторы постоянного тока, конструктивно выполняются в одном корпусе с приводным двигателем, образуя тахометрический агрегат (АДТ, ДТ).
ЛАБОРАТОРНАЯ РАБОТА № 5 Цель работы
Целью работы является экспериментальное определение основных характеристик и параметров полупроводниковых терморезисторов (ПТР) непосредственного и косвенного подогрева.
Теоретическая часть
5.2.1 Общие сведения о полупроводниковых терморезисторах Полупроводниковые терморезисторы в большинстве случаев являются нелинейными элементами электрических цепей. Нелинейность вольт-амперных характеристик обусловлена большим влиянием нагрева рабочего тела при прохождении электрического тока (положительной тепловой обратной связи) и нелинейностью температурной характеристики. В зависимости от назначения ПТР выполняются различной конструкции. Для целей регулирования и измерения температуры ПТР выполняются малых размеров в форме бусинок диаметром 1 мм и менее или имеют форму обычных маломощных резисторов и другие формы. В качестве материала ПТР в основном применяются смеси окислов меди и марганца (тип ММТ), кобальта и марганца (КМT). Рассмотрим основные характеристики и параметры определяющие его свойства и требования для их экспериментального определения.
5.2.2 Температурная характеристика
Температурной характеристикой ПТР называется зависимость сопротивления от температуры и в рабочем диапазоне температур достаточно точно описывается выражением: R=R0 e-b/Т, (3.2.1) где R – сопротивление рабочего тела ПТР при определенной температуре в омах; Т – температура, К; е – основание натурального логарифма; R 0, b – коэффициенты, постоянные для данного экземпляра терморезистора; Для вычисления R 0, b достаточно подставить два известных значения сопротивления и соответствующие им температуры в выражение (3.2.1). Решение полученной системы уравнений даст формулу вычислений R 0, b.
Следовательно, температурную характеристику можно считать заданной, если известны сопротивления При изменении сопротивления ПТР необходимо обеспечить постоянство температур окружающей среды, помещая ПТР в термостаты. Измерение можно производить с помощью универсальных мостов или по методу амперметра и вольтметра. Однако в любом случае предварительно следует выяснить величину измерительного тока, который не вызовет заметного разогрева рабочего тела ПТР. Для этого можно воспользоваться вольт-амперной характеристикой (ВАХ) ПТР при комнатной температуре.
5.2.3 Статическая вольтамперная характеристика
Статическая ВАХ ПТР – это зависимость между протекающим через него током и падением напряжения при установившемся режиме нагрева U = f (J). В связи с тем, что при прохождении через ПТР тока в нем выделяется тепло, температура рабочего тела оказывается выше температуры окружающей среды. Сопротивление ПТР принимает значение, соответствующе этой суммарной температуре (температура среды + перегрев). Поскольку сопротивление связано с температурой нелинейной зависимостью, ВАХ также нелинейна. ВАХ снимается экспериментально при постоянной температуре окружающей среды. Состав среды и скорость ее перемещения относительно поверхности ПТР должны поддерживаться постоянными в течении эксперимента. Изменение температуры, состава или скорости среды вызовут существенные изменения формы ВАХ. Обычно в литературе приводятся ВАХ, снятые в спокойном воздухе или же указываются условия её определения. Пример характеристики приведен на рис.1. В силу нелинейности ВАХ статическое сопротивление ПТР зависит от величины установившегося тока протекающего через ПTP. Оно определяется как отношение падения напряжения на ПТР к протекающему через него току в установившемся режиме: R=U/J (3.2.4) где U – падение напряжения на ПТР, В; J – установившийся через ПТР ток, А.
Рис. 1 Вольт-амперная характеристика ПТР
По величине статического сопротивления можно найти температуру рабочего тела ПТР соответствующую данной точке ВАХ. Для этого надо располагать температурной характеристикой данного ПТР. Дифференциальное сопротивление равно пределу отношения приращения напряжения на ПТР к приращению тока в нем, когда последнее приращение стремится к нулю. Если ВАХ имеет точку максимума, то в этой точке дифференциальное сопротивление rg определится
Правее точки максимума rg <0. Статическое сопротивление пропорционально тангенсу угла α, образованного секущей, проведенной из начала координат в рассматриваемую точку ВАХ, и осью токов. Дифференциальное сопротивление пропорционально тангенсу угла b образованного касательной в рассматриваемой точке характеристики с осью токов (рис. 1).
5.2.4 Характеристики рассеяния В установившемся режиме нагрева ПТР протекающим через него током вся мощность, выделяемая в рабочем теле ПТР, рассеивается в окружающую среду. Это условие можно записать в виде уравнения энергетического баланса для установившегося режима. JU=b Q (3.2.6) где b – коэффициент рассеяния, учитывающий все виды распространения тепла от рабочего тела ПТР (тепловое излучение, конвекцию и теплопроводность); Q – температура перегрева, т.е. разность между температурой рабочего тела в данном установившемся режиме Т к и температурой окружающей среды Т 0. Величина коэффициента рассеяния b зависит от материала, размеров, состояния поверхности рабочего тела ПТР и токоподводящих частей, а также свойств окружающей среды (состава, скорости перемещения и т.д.). Входящий в уравнение (3.2.6) коэффициент рассеяния является функцией температуры перегрева. Зависимость b=f (Q) (3.2.7) называется характеристикой рассеяния. Чтобы построить характеристику рассеяния, достаточно иметь ВАХ конкретного типа ПТР, снятую при какой-либо постоянной температуре среды (Т 0) и его температурную характеристику. На ВАХ выбирают ряд точек, в каждой из которых подсчитывают статическое сопротивление. Затем по температурной характеристике находят температуру ПТР, соответствующую каждой из выбранных точек ВАХ, и вычитая из нее температуру среды (Т 0), определяют температуру перегрева b. Величина b подсчитывается по выражению (3.2.6).
5.2.5 Подогревные терморезисторы
|
||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-04-26; просмотров: 261; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.19.30.232 (0.171 с.) |



 (1.2.1)
(1.2.1) (1.2.2)
(1.2.2) – среднее расстояние от оси вращения до активной стороны витка.
– среднее расстояние от оси вращения до активной стороны витка. (1.2.3)
(1.2.3) ) и управления (
) и управления ( ) (рис 4).
) (рис 4).

 , а на обмотку управления подается управляющее напряжение
, а на обмотку управления подается управляющее напряжение  , которое сдвинуто по фазе на некоторый угол
, которое сдвинуто по фазе на некоторый угол  по отношению к напряжению возбуждения.
по отношению к напряжению возбуждения. (1.2.4)
(1.2.4) – коэффициент пропорциональности.
– коэффициент пропорциональности. момент при круговом поле
момент при круговом поле ;
;  ),
), (1.2.5)
(1.2.5) ,
,  – коэффициент управления
– коэффициент управления при круговом вращающемся магнитном поле (рис. 4б) находится из выражения:
при круговом вращающемся магнитном поле (рис. 4б) находится из выражения: (1.2.6)
(1.2.6) – частота питающего напряжения;
– частота питающего напряжения; – ток в цепи эквивалентной схемы при круговом поле;
– ток в цепи эквивалентной схемы при круговом поле; ,
,  – эквивалентное сопротивление контуров намагничивания и ротора.
– эквивалентное сопротивление контуров намагничивания и ротора.
 (В) должно быть пропорциональным скорости вращения ротора – (об/мин). Эта зависимость называется скоростной характеристикой.
(В) должно быть пропорциональным скорости вращения ротора – (об/мин). Эта зависимость называется скоростной характеристикой. (2.2.1)
(2.2.1)

 (2.2.3)
(2.2.3) , (2.2.4)
, (2.2.4) (2.2.5)
(2.2.5) и
и  – const) выходные характеристики будут линейными. На рис.2 изображены сплошными линиями выходные характеристики для различных сопротивлений нагрузки. Угол наклона уменьшается при уменьшении сопротивления нагрузки.
– const) выходные характеристики будут линейными. На рис.2 изображены сплошными линиями выходные характеристики для различных сопротивлений нагрузки. Угол наклона уменьшается при уменьшении сопротивления нагрузки.


 при различных значениях нагрузки Zn.
при различных значениях нагрузки Zn.


 (2.2.6)
(2.2.6) (2.2.7)
(2.2.7) – обмоточный коэффициент обмотки возбуждения. Т.к. поток Ф q пропорционален скорости вращения ротора, то ЭДС e ¢ u, токи i ¢ u и н.с. F 2 d будут пропорциональны уже квадрату этой скорости. Следовательно, они будут не линейно уменьшать магнитный поток и ЭДС E г при увеличении скорости вращения.
– обмоточный коэффициент обмотки возбуждения. Т.к. поток Ф q пропорционален скорости вращения ротора, то ЭДС e ¢ u, токи i ¢ u и н.с. F 2 d будут пропорциональны уже квадрату этой скорости. Следовательно, они будут не линейно уменьшать магнитный поток и ЭДС E г при увеличении скорости вращения. Уравнение выходной характеристики в комплексной форме имеет вид:
Уравнение выходной характеристики в комплексной форме имеет вид: , (2.2.8)
, (2.2.8)

 (3.2.2)
(3.2.2) (3.2.3)
(3.2.3) и
и  . Обычно в качестве
. Обычно в качестве 
 (3.2.5)
(3.2.5)


