Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Основные законы регулирования
При неизменных свойствах объекта качество регулирования в АСР зависит от свойств остальных ее элементов, в первую очередь регулятора. Свойства регулятора определяются характером преобразования его входного сигнала Δх в выходной z. Так, для АСР уровня в емкости (см. рис. 3.2) регулятором является рычаг 2. При изменении уровня в емкости, например при его увеличении, поплавок 1 поднимается и поворачивает рычаг 2, который через шток 3 прикрывает клапан 4, уменьшая приток жидкости в емкость. В этой АСР исполнительный механизм отсутствует и выходной сигнал регулятора одновременно является входным сигналом регулирующего органа — степенью открытия клапана. В этом регуляторе перемещение штока пропорционально перемещению поплавка. Следовательно, выходной сигнал этого регулятора пропорционален входному — отклонению уровня от заданного значения. Существуют регуляторы, имеющие и другие зависимости выходного сигнала от входного. Характер зависимости выходного сигнала регулятора от входного, т. е. закон, по которому его входной сигнал преобразуется в выходной, называется законом регулирования. Как известно, несмотря на большое разнообразие объектов регулирования, характерные их свойства, имеющие существенное значение для целей управления, немногочисленны, как и сами способы управления объектами. Это объясняется общностью физических законов, которым подчиняются различные процессы, протекающие в объектах и системах регулирования. Практика показала, что подобная универсальность присуща и законам регулирования для самых различных объектов в инженерных системах. Используя весьма небольшое число типовых законов регулирования, можно достаточно качественно управлять почти всеми инженерными системами. При этом для каждого объекта достаточно подобрать лишь параметры настройки регулятора. Применение таких типовых законов регулирования позволяет использовать в АСР стандартные, серийно выпускаемые регуляторы, что имеет неоспоримые достоинства. Однако в отдельных случаях (при высоких требованиях к качеству АСР, сильно изменяющихся свойствах объектов и т. п.) типовые законы регулирования оказываются неэффективными и приходится прибегать к более сложным законам.
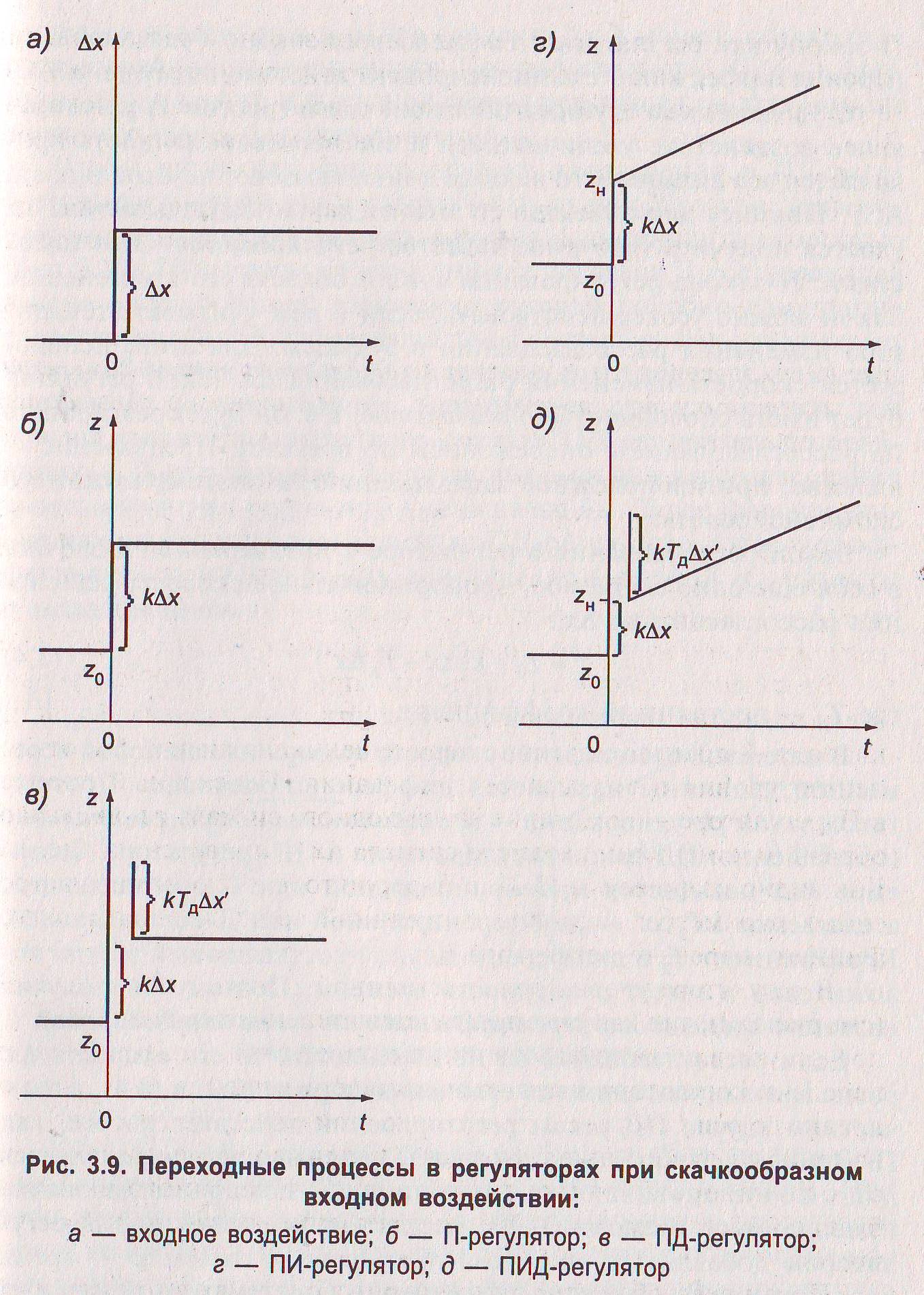
Свойства регулятора с тем или иным законом регулирования проявляются, как и свойства объектов регулирования и АСД; в реакции на скачкообразное входное воздействие Δх, показанное на рис. 3.9, а. Рассмотрим типовые законы регулирования и области их применения. Наиболее простым является такой закон регулирования, при котором выходной сигнал регулятора z линейно зависит от входного Δх:
z = z0+ kΔх, (3.3)
где k — коэффициент пропорциональности, называемый коэффициентом передачи регулятора, a zo — постоянная составляющая сигнала z. Как видно из формулы (3.3), z0 — это такое значение выходного сигнала регулятора, при котором рассогласование Δх на его входе равно нулю. Закон регулирования, выраженный формулой (3.3), называется пропорциональным. Сокращенно говорят, что это П - закон регулирования, а сам регулятор с таким законом регулирования называют пропорциональным или П - регулятором. Этот закон действует, например, при регулировании уровня в емкости, где регулирующее воздействие — степень открытия клапана — пропорционально перемещению поплавка, т. е. отклонению уровня в емкости от его задания. Переходный процесс в П - регуляторе — изменение его выходного сигнала z при скачкообразном изменении входного сигнала Δ х — приведен на рис. 3.9. Как видно из формулы (3.3), в П - регуляторе имеются два настроечных параметра: величина постоянной составляющей и коэффициент передачи регулятора k. В регуляторе уровня роль постоянной z0 играет длина штока 3 (см. рис. 3.2), так как ею определяется степень открытия клапана z при отсутствии рассогласования, т. е. при Δх = 0. Коэффициентом передачи регулятора k является отношение плеч рычага 2 от поплавка до оси поворота и от штока до этой оси. Действительно, при изменении одного из плеч рычага, например удалении поплавка от оси поворота, отклонению уровня от заданного значений будет соответствовать меньшее перемещение клапана, т. е. k уменьшится. Почти всем объектам в инженерных системах в той или иной мере присуще запаздывание, особенно переходное. Запаздывание ухудшает качество регулирования в АСР с обратной связью. Физически это можно объяснить тем, что возмущающее воздействие на объект с запаздыванием не сразу сказывается в рассогласовании;
следовательно, регулятор реагирует на возмущающее воздействие также с запаздыванием. В результате и регулирующее воздействие запаздывает по отношению к вызвавшему его возмущающему воздействию. Таким образом, регулирующее воздействие по П - закону как бы оказывается несвоевременным и неспособным поэтому эффективно скомпенсировать действие возмущений. С увеличением глубины обратной связи (ростом k) регулирующее воздействие увеличивается и его несвоевременность проявляется все сильнее, что в конце концов вызовет неустойчивость АСР. Поэтому для объектов со значительным запаздыванием не удается получить требуемое качество регулирования. Этот недостаток П - закона регулирования сужает область его применения. Закон можно усовершенствовать, если в нем учитывать тенденцию изменения рассогласования в будущем. Для этого используется скорость изменения рассогласования Δ х. Такой регулятор будет иметь способность к предварению, т. е. он будет реагировать на рассогласование с опережением по времени. Предварение — явление, противоположное запаздыванию, и поэтому может его скомпенсировать. Закон регулирования в регуляторе с предварением включает в себя еще одно слагаемое, пропорциональное скорости изменения рассогласования Δ x': z = z0+k(Δx + TдΔx'), (3.4) где Т д — постоянный коэффициент. В математике нахождение скорости изменения некоторой переменной величины называется дифференцированием. Поэтому такой закон регулирования — пропорционально-дифференциальный (сокращенно: ПД- закон регулирования и ПД- регулятор). Слагаемое kΔх называется пропорциональной или П - составляющей, а слагаемое kТдΔх' — дифференциальной или Д-составляющей. Коэффициент Т д в дифференциальной составляющей всегда положителен и имеет размерность времени. Поэтому он получил название времени дифференцирования или времени предварения. Если рассогласование Δ х не изменяется, то его скорость Δ х ' равна нулю и, как видно из сравнения формул (3.3) и (3.4), в этом частном случае ПД -закон регулирования действует так же, как П -закон. Следовательно, действие Д-составляющей проявляется лишь в неустановившемся состоянии АСР, пока рассогласование изменяется во времени. В ПД - регуляторе в сравнении с П - регулятором добавляется еще один настроечный параметр — время предварения ТД. Переходный процесс в П - регуляторе показан на рис. 3.9, в. Из сравнения графиков ПД - закона регулирования и П - закона видно, что первый характеризуется наличием импульса, возникающего в момент скачка рассогласования. Появление этого импульса объясняется тем, что скорость Δ х ' в момент скачка рассогласования бесконечно велика. Поэтому слагаемое kТ д Δx ' в формуле (3.4), а значит, и выходной сигнал регулятора z в этот момент достигают очень больших значений. Чтобы нагляднее увидеть эффект предварения в ПД - регуляторе, рассмотрим его реакцию не на скачкообразное, а на постепенное изменение рассогласования с постоянной скоростью (рис. 3.10). Пунктиром на этом графике показана П - составляющая закона регулирования, изменение которой подобно изменению рассогласования. Дифференциальная составляющая увеличивает выходной сигнал регулятора z в течение всего времени, пока увеличивается рассогласование. Чем быстрее оно изменяется, тем больше увеличение выходного сигнала ПД - регулятора по сравнению с П - регулятором. В случае уменьшения рассогласования выходной сигнал регулятора уменьшался бы. Такое форсированное изменение выходного сигнала ПД - регулятора позволяет эффективнее компенсировать действие возмущений на объекты с запаздыванием.
Итак, ПД - закон регулирования расширяет область применения П -закона на объекты со значительным запаздыванием. При этом следует иметь в виду, что дифференцирование рассогласования не является идеальным его предварением и поэтому не может полностью устранить вредное влияние запаздывания сигнала в контуре обратной связи АСР. В особенности это касается транспортного запаздывания, когда входное воздействие в течение всего времени запаздывания никак не проявляется в рассогласовании Δ х, а следовательно, и в скорости его изменения Δ х'. Может оказаться, что для таких объектов не только ПД-, но и никакой другой закон регулирования не обеспечит требуемого качества АСР. Это тот случай, когда обратная связь как способ регулирования по отклонению оказывается бессильной. Выход из положения — применение дополнительного регулирующего воздействия по возмущению, т. е. комбинированной АСР. П- и ПД -законы регулирования являются статическими: установившееся рассогласование (статическая ошибка) в АСР с П- и ПД -регуляторами не равно нулю. На это уже обращалось внимание в примере регулирования уровня в емкости. Дальнейшее совершенствование II- и ПД -регуляторов заключается в придании им свойства астатизма, т. е. способности устранять с течением времени статическую ошибку АСР. Примером такого регулятора может служить регулятор давления воздуха в ресивере. Как упоминалось, астатизм регулятора проявляется в том, что его выходной сигнал z непрерывно и неограниченно изменяется все время, пока существует ненулевой входной сигнал Δ х. В рассмотренных выше законах регулирования (формулы (3.3) и (3.4)) астатизм можно обеспечить только за счет составляющей z0, которая уже не должна быть постоянной. Для этого достаточно изменять ее со скоростью, пропорциональной рассогласованию, т. е.
z0' = (k/Т и )Δх, (3.5) где z0 — скорость изменения величины z0, k / Т и — коэффициент пропорциональности, в котором k — коэффициент передачи регулятора, Т и — постоянный коэффициент. Как видно из (3.5), при отсутствии рассогласования скорость z0 равна нулю и, следовательно, z0 не изменяется. При наличии рассогласования z0' не равна нулю и z0 непрерывно изменяется. По известной скорости z0' можно восстановить и саму величину z0, подобно тому, как, например, зная скорость движения тела, можно найти пройденный им путь. Операция отыскания переменной величины по известной скорости ее изменения обратна операции дифференцирования и называется интегрированием. Величина Т и, имеющая размерность времени, называется временем интегрирования. Итак, если в П -законе регулирования значение z0 вычислять из формулы (3.5), то получим астатический закон регулирования: z = z0 + kΔх; z0'=(k/Т и )Δх. (3.6)
Такой закон регулирования называется пропорционально- интегральным (сокращенно ПИ-закон регулирования и соответственно ПИ-регулятор). Здесь переменная величина z0 является интегральной составляющей закона ре1слирования (И - составляющей). Аналогично, если в ПД - законе регулирования значение z0 вычислять из формулы (3.5), то получим также астатический пропорционально-интегрально-дифференциальный закон регулирования (сокращенно ПИД- закон регулирования и соответственно ПИД- регулятор): z = z0 + k(Δх+T д Δx'); z0'=(k/Т и )Δх. (3.7) Переходные процессы в ПИ- и ПИД -регуляторах показаны на рис. 3.9, г, д. В результате введения И -составляющей величина z0 перестает быть параметром настройки ПИ- и ПИД -регуляторов. Вместо нее в этих регуляторах появляется новый параметр настройки — время интегрирования ТИ. Итак, типовые законы (П, ПД, ПИ и ПИД) состоят из П-, Д- и И- составляющих, каждая из которых по-своему связана с входным сигналом регулятора Δ х. ПИД -закон включает все три составляющие. При T д = 0 он превращается в ПИ-, а при бесконечно большом Т и — в ПД -закон. Если одновременно T д = 0 и Т и бесконечно велико, то ПИД -закон превращается в П- закон регулирования. Возможен и чисто интегральный закон регулирования (И -закон), состоящий из одной И- составляющей: z' = (k / Т и )Δх, (3.8)
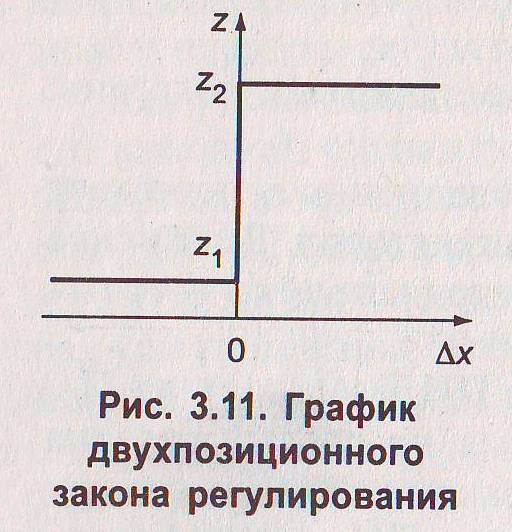
где z' — скорость изменения выходного сигнала регулятора. И -закон регулирования (И -регулятор) является астатическим и применяется для регулирования объектов со слабо выраженными динамическими свойствами (малые запаздывание и инерция). В отличие от него ПИ-закон регулирования, также астатический, называют еще изодромным. Рассмотренные типовые законы регулирования характеризуются непрерывной зависимостью выходного сигнала регулятора z от рассогласования Δ х: любое сколь угодно малое изменение вызывает изменение z. Однако применяемые на практике законы не только непрерывные. Существуют и дискретные законы регулирования, в частности релейные, где выходной сигнал регулятора z имеет лишь одно из двух возможных значений: z1 или z2. Следовательно, и регулирующий орган может находиться в одном из двух положений: открыто (включено), закрыто (выключено). Такой закон называется двухпозиционным, и для него зависимость выходного сигнала от входного имеет вид
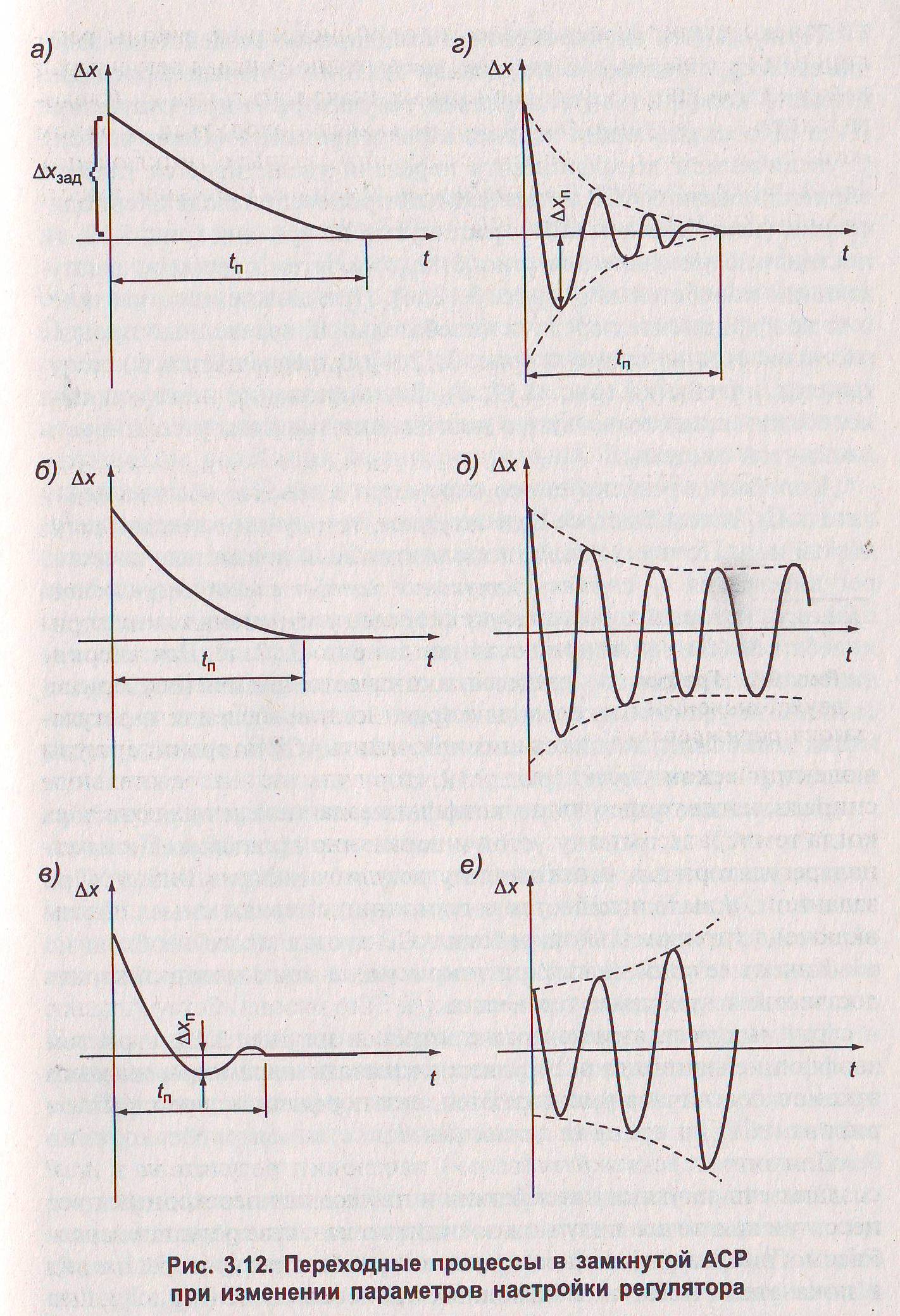
z=z1 приΔ x<0; z=z2 приΔ x>0. (3.9) Зависимость (3.9) представлена графически на рис. 3.11. Из него видно, что при изменении знака рассогласования Δ х выходной сигнал регулятора z в релейном законе изменяется скачком от одного возможного значения до другого, а регулирующий орган соответственно переключается из одного положения в другое. Релейные регуляторы обычно конструктивно проще непрерывных, и их применяют, когда не предъявляются высокие требования к качеству управления. Примером двухпозиционного релейного регулятора может служить регулятор температуры в электрическом утюге. Этот регулятор включает нагревательную спираль, когда температура утюга ниже заданной, и выключает ее, когда температура становится выше заданной. Здесь входной сигнал регулятора Δ х — отклонение регулируемой температуры от заданной, а выходной — это z -состояние спирали: z1 — спираль включена (при Δ x < 0), z2 — выключена (при Δ x > 0). Как отмечалось, АСР обычно нуждаются в настройке для достижения требуемого качества регулирования. С этой целью в серийных регуляторах предусмотрены органы настройки, позволяющие изменять в широком диапазоне параметры типовых законов регулирования: коэффициент передачи k, время интегрирования Т и и время предварения T д. Для определения параметров настройки регулятора в АСР создают стандартные воздействия и наблюдают переходный процесс, так как по его виду можно судить о качестве регулирования. Рассмотрим влияние параметров настройки регулятора на вид и показатели качества переходных процессов в АСР (рис. 3.12).
Примем, что скачкообразное стандартное воздействие величиной Δ x зад приложено по каналу задания. Вначале проследим влияние коэффициента передачи регулятора k при отсутствии И- и Д-составляющих в законе регулирования (П -регулятор). С увеличением коэффициента передачи увеличивается глубина обратной связи в АСР и переходный процесс, вначале апериодический (неколебательный) и растянутый во времени (рис. 3.12, а), постепенно уменьшается (рис. 3.12, б) и затем переходит в затухающий колебательный (рис. 3.12, в). При дальнейшем увеличении коэффициента передачи колебательный переходный процесс растягивается во времени (рис. 3.12, г) и превращается в незатухающие колебания (рис. 3.12, д). Возникновение незатухающих колебаний свидетельствует о достижении границы устойчивости замкнутой системы. Колебания регулируемого параметра в объекте обычно нежелательны, и чем быстрее они затухают, тем лучше качество регулирования. Поэтому вводят дополнительный показатель качества регулирования — степень затухания колебательного переходного процесса, который характеризует скорость уменьшения амплитуды колебаний (см. пунктирную линию на рис. 3.12, г). Для апериодического переходного процесса, в котором колебания отсутствуют, степень затухания максимальна (рис. 3.12, а, б), а для незатухающих колебаний, возникающих при работе АСР на границе устойчивости, — равна нулю (рис. 3.12, д). Дальнейшее увеличение коэффициента передачи регулятора выводит АСР за границу устойчивости, что проявляется в самопроизвольном нарастании амплитуды колебаний (рис. 3.12, ё). При этом все показатели качества регулирования теряют смысл. Таким образом, для нормальной работы АСР прежде всего необходимо обеспечить ее устойчивость, и только после этого можно говорить о качестве переходных процессов. Как видно из переходных процессов на рис. 3.12, с ростом коэффициента передачи регулятора площадь и время переходного процесса t п сначала уменьшаются, а затем увеличиваются и при работе АСР на границе устойчивости становятся бесконечно большими. Степень затухания колебательного переходного процесса все время уменьшается вплоть до возникновения незатухающих колебаний. Перерегулирование Δ x псначала равно нулю (рис. 3.12, а, б), а затем увеличивается и приближается к величине Δ x зад. Лучшее качество регулирования достигается при работе АСР вблизи границы устойчивости. Однако следует иметь в виду, что АСР с П -регулятором имеет статическую ошибку, которая может оказаться недопустимо большой даже вблизи границы устойчивости, т. е. при максимально возможном коэффициенте передачи П -регулятора. Рассмотрим влияние И -составляющей закона регулирования на качество переходных процессов в АСР. Уменьшение времени интегрирования Т и в ПИ-регуляторе, как и увеличение коэффициента передачи, приводит к увеличению глубины обратной связи. При этом вид переходных процессов и показатели их качества изменяются примерно так же, как и при увеличении коэффициента передачи (в последовательности на рис. 3.12, а—д). При введении И -составляющей статическая ошибка исчезает, но при этом затухающие колебания возникают раньше. В результате граница устойчивости АСР достигается при меньших значениях коэффициента передачи, чем при отсутствии И -составляющей. Поэтому говорят, что введение И -составляющей уменьшает запас устойчивости системы. Таким образом, увеличению глубины обратной связи в АСР (увеличению коэффициента передачи и уменьшению времени интегрирования) с целью улучшения качества регулирования препятствует возникновение неустойчивости в замкнутой системе регулирования. Поэтому для объектов с неблагоприятными динамическими свойствами часто не удается обеспечить требуемое качество регулирования при использовании регуляторов, имеющих только П- и И -составляющие. Увеличить степень затухания колебаний в переходном процессе при неизменных параметрах настройки и П- и И -составляющих позволяет введение Д-составляющей. Иначе говоря, введение Д-составляющей в закон регулирования как бы отодвигает границу устойчивости АСР и увеличивает запас ее устойчивости. Поэтому для управления объектами с неблагоприятными динамическими свойствами применяют ПИД- регуляторы. При настройке регулятора АСР стандартные воздействия по каналу задания создают скачкообразным изменением сигнала задания, а по каналу возмущения — скачкообразным перемещением регулирующего органа. При этом величина стандартного воздействия, с одной стороны, должна быть достаточно большой, чтобы переходный процесс четко выделялся на фоне случайных колебаний регулируемого параметра, а с другой — достаточно малой, чтобы не вызвать недопустимых нарушений технологического регламента. Эти противоречивые требования затрудняют настройку АСР по переходным процессам в промышленных условиях и требуют от наладчика определенных навыков и квалификаций.
КЛАССЫ СИСТЕМ РЕГУЛИРОВАНИЯ В системах автоматизации для перемещения регулирующих органов и формирования алгоритмов регулирования используют различные виды энергии (электрическая, пневматическая, гидравлическая). Отдельный класс составляют регуляторы, не потребляющие энергию от внешнего источника, а использующие энергию регулируемой среды. Такие регуляторы называются регуляторами прямого действия. Они просты по конструкции, но, как правило, не позволяют получить требуемый закон регулирования и достаточную мощность выходного сигнала для регулирующего органа (РО). Поэтому в сложных системах регулирования применяются регуляторы непрямого действия, для работы которых необходим источник энергии. Устройства, потребляющие энергию одного рода, образуют в Государственной системе промышленных приборов и средств автоматизации (ГСП) единую структурную группу или «ветвь ГСП». При автоматизации инженерных систем зданий и сооружений наиболее широко применяют регуляторы двух ветвей ГСП: электрическую и пневматическую. В электрической ветви в настоящее время существует несколько систем регуляторов. Наибольшее распространение получила электронная агрегатная унифицированная система (ЭАУС). Каждый регулятор ЭАУС состоит из двух блоков: измерительного и формирующего. Измерительный блок предназначен для алгебраического суммирования входных сигналов регулятора и пропорционального преобразования регулирующего сигнала (рассогласования) в напряжение постоянного тока. Формирующий блок служит для преобразования этого напряжения в выходной сигнал по заданному закону регулирования. Регуляторы ЭАУС работают с регулирующими органами, снабженными электрическими исполнительными механизмами (ЭИМ), электродвигатели которых рассчитаны на напряжение определенной величины и имеют постоянную скорость вращения. Поэтому регулирующий орган ЭИМ может перемещаться с постоянной скоростью (при включенном электродвигателе) или оставаться в неподвижном положении (при выключенном электродвигателе). Изменять скорость перемещения РО можно лишь в режиме периодического включения и выключения ЭИМ путем подачи на электродвигатель импульсов напряжения постоянной амплитуды. При этом РО будет перемещаться не непрерывно, а скачками. Если же импульсы напряжения следуют достаточно часто друг за другом, то скачкообразное перемещение РО будет восприниматься объектом регулирования как непрерывное управляющее воздействие. Однако наличие в ряде элементов ЭАУС контактов, ухудшающих показатели надежности, а также трудности изменения скорости хода ЭИМ и опасность применения электрических устройств во взрывоопасных условиях ограничивают использование таких систем. Приборы пневматической ветви ГСП характеризуются безопасностью применения в легковоспламеняющихся и взрывоопасных средах, простотой устройства, безопасностью обслуживания, высокой надежностью, низкой стоимостью и большими функциональными возможностями. Пневматические системы особенно удобны для крупных зданий и сооружений при большом количестве автоматизированных инженерных систем, так как требуют менее квалифицированного обслуживания, чем электрические. Пневматические регуляторы (ПР) создают из унифицированных элементов и модулей, каждый из которых выполняет какую- либо простую операцию. Главной частью пневматической ветви ГСП является система «Старт», регуляторы которой предназначены для работы с РО, снабженными пневматическим исполнительным механизмом (ПИМ), и используют унифицированные пневматические сигналы. Основными в системе «Старт» являются регуляторы: позиционные (релейные) — ПР1.5, ПР1.6; пропорциональные (П),— ПР2.5, ПР2.8; пропорционально-интегральные (ПИ) — ПР3.21, ПР3.22, ПР3.23, ПР3.31; пропорционально-интегрально-дифференцильные (ПИД) — ПР3.25, ПР3.35, а также функциональные элементы, осуществляющие алгебраическое сложение, умножение и деление сигналов — ПФ1.1, усиление — П1.5, ограничение — ПФ11.1, переключение и др. Использование регуляторов и элементов системы «Старт» позволяет создавать любые сложные регулирующие системы. В инженерных системах их применяют для регулирования давления, температуры, уровня и других параметров, а в ряде случаев и в комбинации с элементами электрической ветви ГСП. Самостоятельную ветвь ГСП составляют регуляторы прямого действия, работающие без использования вспомогательной энергии. Это регуляторы, серийно выпускаемые как отечественными приборостроительными заводами, например Московским заводом тепловой автоматики и Мытищинским заводом тепловых приборов, так и известными зарубежными фирмами Данфосс (Дания) и Хонэвелл (США), широко используются в нашей стране при автоматизации инженерных систем. Достоинство этих регуляторов заключается в автономности (не требуются источники питания), высокой надежности (минимальное число элементов), а также простоте изготовления, монтажа и ремонта. Основные типы таких регуляторов более подробно рассмотрены в последующих разделах учебника.
|
|||||||||
|
|
Последнее изменение этой страницы: 2016-04-19; просмотров: 3139; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.220.16.184 (0.042 с.) |