Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Основные теоретические положения
Микроконтроллер (англ. Micro Controller Unit, MCU) – микросхема, предназначенная для управления электронными устройствами. Типичный микроконтроллер сочетает на одном кристалле функции процессора и периферийных устройств, содержит оперативное запоминающее устройство (ОЗУ) и (или) постоянное запоминающее устройство (ПЗУ). По сути, это однокристальный компьютер, способный выполнять различные задачи. Конечно, мощность такого компьютера совсем небольшая и не сравнится с мощностью настольного или портативного компьютера. Но ведь далеко не для всех задач она и нужна – для относительно простых задач и применяют микроконтроллеры, и их мощностипредостаточно. Основным же плюсом использования одного микроконтроллера, в котором интегрированы все необходимые компоненты, вместо россыпи отдельных микросхем (процессор, ОЗУ, ПЗУ, периферия), является снижение стоимости, размеров, энергопотребления, а также затрат на разработку и сборку необходимого устройства. Впервые такое устройство как микроконтроллер, которое тогда называлось еще однокристальной микро-ЭВМ, было разработано в 1971 году сотрудниками компании Texas Instruments, которые предложили интегрировать изобретенный незадолго до этого микропроцессор на один кристалл со всеми необходимыми компонентами. Поскольку под разные задачи лучше всего использовать наиболее подходящие для них микроконтроллеры, а количество применений для микроконтроллеров поистине неиссякаемое, то логично, что компании производители выпускают большое, измеряемое в сотнях, количество самых разнообразных по своим техническим характеристикам микроконтроллеров. По своим характеристикам, микроконтроллеры бывают как совсем простые – четырехразрядные (4-хбитные) с небольшой рабочей частотой, измеряемой в килогерцах, так и очень мощные – до 64-х битных, с тактовой частотой, измеряемой в мегагерцах. Существует огромное количество типов микроконтроллеров, отличающихся архитектурой процессорного модуля, размером и типом встроенной памяти, набором периферийных устройств, типом корпуса и т. д. В отличие от обычных компьютерных микропроцессоров, в микро-контроллерах часто используется гарвардская архитектура памяти, то есть раздельное хранение данных и команд в ОЗУ и ПЗУ соответственно.
Кроме ОЗУ, микроконтроллер может иметь встроенную энерго-независимую память для хранения программы и данных. Во многих контроллерах вообще нет шин для подключения внешней памяти. Наиболее дешёвые типы памяти допускают лишь однократную запись. Такие устройства подходят для массового производства в тех случаях, когда программа контроллера не будет обновляться. Другие модификации контроллеров обладают возможностью многократной перезаписи энергонезависимой памяти. Неполный список периферии, которая может присутствовать в микроконтроллерах, включает в себя: · Универсальные цифровые порты, которые можно настраивать как на ввод, так и на вывод; · Различные интерфейсы ввода - вывода, такие как UART, I²C, SPI, CAN, USB, IEEE 1394; · Аналого-цифровые и цифро-аналоговые преобразователи; · Компараторы; · Широтно-импульсные модуляторы; · Таймеры; · Контроллеры бесколлекторных двигателей; · Контроллеры дисплеев и клавиатур; · Радиочастотные приемники и передатчики; · Массивы встроенной флеш-памяти; · Встроенный тактовый генератор и сторожевой таймер; Ограничения по цене и энергопотреблению сдерживают также рост тактовой частоты контроллеров. Хотя производители стремятся обеспечить работу своих изделий на высоких частотах, они, в то же время, предоставляют заказчикам выбор, выпуская модификации, рассчитанные на разные частоты и напряжения питания. Во многих моделях микроконтроллеров используется статическая память для ОЗУ и внутренних регистров. Это даёт контроллеру возможность работать на меньших частотах и даже не терять данные при полной остановке тактового генератора. Часто предусмотрены различные режимы энергосбережения, в которых отключается часть периферийных устройств и вычислительный модуль. RISC-архитектура (Reduced Instruction Set Computer) – архитектура процессора с сокращенным набором команд. Наиболее важные отличительные особенности RISC архитектуры: архитектура регистр-регистр, простые способы адресации, простые команды и большой регистровый файл. Например, микроконтроллер MSP430 имеет 27 основных инструкций и 24 дополнительных инструкции, что значительно упрощает процесс генерации команд. Отсутствуют специальные команды обращения к аккумулятору, памяти или к периферийным устройствам. Это существенно повышает эффективность работы процессора. Ядро процессора – 16-битовое RISC ALU, имеет шестнадцать 16-битовых регистров. Четыре регистра выполняют функции программного счетчика (PC), регистра статуса (SR), указателя стека (SP) и регистра констант (CG). Остальные двенадцать 16-битовых регистра – полностью в распоряжении пользователя.
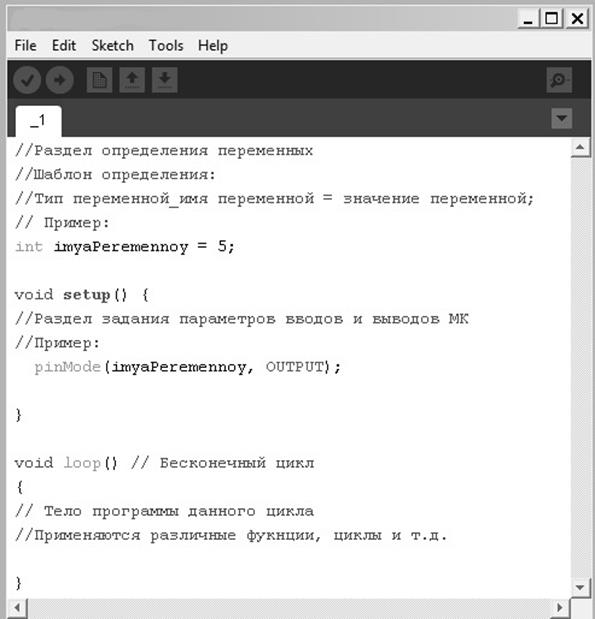
Регистры общего назначения используются для хранения переменных, указателей и для операций с данными. Процессор обращается к этим регистрам непосредственно, что содействует высокой эффективности работы микроконтроллера MSP430. Время выполнения команд – 1-4 машинных цикла (1-4) mkS. MSP430. Начнем знакомство с микроконтроллерами (МК) на примере простого MSP-430 [1]. Так как данный МК может программироваться с помощью языков высокого уровня, а именно Wiring/Arduino (Фактически — нет никакого особого языка программирования, и программы пишутся на C/C++, а компилируются и собираются с помощью программы Energia [2]). Краткая инструкция по программированию с помощью ПО Energia приведена на рисунке 1.1.
Рисунок 1.1 - Структура программы Программа, изображенная на рисунке 1.1, имеет следующую структуру: сначала, необходимо указать раздел определения переменных. Далее необходимо указать тип, имя и значения переменных. Следующим, идет раздел задания параметров выводов и вводов микроконтроллера. Раздел void setup запускается один раз, после каждого включения питания или сброса платы. Ниже располагается «тело» программы, а конкретно – цикл void loop. Данный цикл характеризуется бесконечным повторением команд входящих в цикл, а также, в нем, могут быть применены различные функции и условия. Основные технические характеристики микроконтроллера приведены в таблице 1.1.
Таблица 1.1 - Технические характеристики микроконтроллера MSP-430 G2553
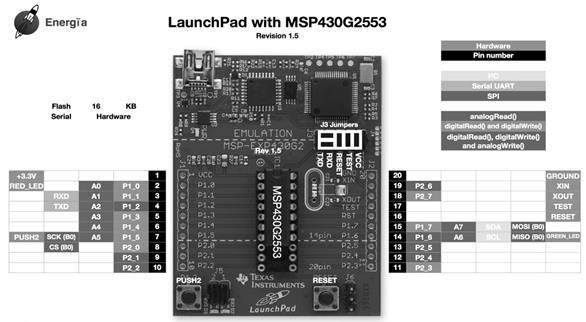
Sketch – это название программ для MSP. Это единичный проект, который загружается и выполняется платой. Вид отладочной платы и MSP-430, с указанием выводов МК приведен на рисунке 1.2.
Рисунок 1.2 - Вид отладочной платы и MSP-430, с указанием вводов и выводов МК Все контакты микроконтроллера (начиная с P1_0 и так далее), при программировании могут быть назначены, как входными, так и выходными. Что, в свою очередь, дает широкие возможности для создания программ различной сложности и объема. Далее, это будет продемонстрировано на конкретных примерах, при решении задач программирования.
|
||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2022-01-22; просмотров: 29; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.191.240.243 (0.01 с.) |