Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Порядок розрахунку статично невизначених систем методом сил.
1) Визначають ступінь статичної невизначеності системи. 2) З заданої статично невизначеної системи утворюють основну шляхом видалення заданого навантаження і всіх зайвих зв’язків. Щоб привезти основну систему у відповідність з заданою навантажують основну систему заданим навантаженням і зайвими невідомими Х1, Х2,...., Хп, які прикладені по напрямку відкинутих зв’язків. (Основну систему окремо не показують, а тільки навантаження). 3) Складають канонічні рівняння, кожне з яких виражає рівність нулю сумарного переміщення того чи іншого перерізу навантаженої системи по напрямку відкинутого зв’язку, яке виникає від дії заданого навантаження і всіх зайвих невідомих. Число канонічних рівнянь повинно бути рівним числу відкинутих зв’язків. 4) Після того як склали канонічні рівняння переходять до обчислення одиничних σік і вантажних ∆ір переміщень. Вантажним називається такий стан основної системи, при якому вона знаходиться лише під дією заданого навантаження. Одиничним називається такий стан основної системи, при якому вона навантажена тільки однією силою, яка дорівнює одиниці (Х і=1) та діє в напрямку невідомої реакції (Хі). а)Викреслюють вантажний і окремо всі одиничні стани основної системи. б) Далі будують відповідні їм вантажну Мр і одиничні М1,М2,..., Мn епюри згинальних моментів. в)Обчислюють одиничні σік і вантажні ∆ір переміщення, за допомогою способу перемноження епюр. г)Наприклад: щоб визначити переміщення σ11 – потрібно епюру М1 перемножити саму на себе; σ12 - перемножити епюри М1 і М2; ∆р - М1 х Мр.
44. При перемноженні епюр необхідно враховувати слідуюче: а) одиничні переміщення з однаковими індексами - σ11, σ22,…, σnn називаються головними; вони ніколи не дорівнюють нулю і завжди додатні, так як при їхньому обчисленні епюри перемножуються самі на себе. б) одиничні переміщення з різними індексами σі1, σі2,..., σіn називаються другорядними; можуть бути величинами додатніми чи від’ємними, тому що при їх обчисленні перемножуються різні епюри. в) на основі теореми про взаємні переміщення (теорема Максвела) одиничні переміщення з взаємно переставленими індексами рівні між собою, тобто σіn = σnі . г) знайдені значення σіn і ∆ір підставляють в канонічні рівняння і знаходять зайві невідомі Х1, Х2,....Хп.
д) Завантаживши основну систему заданим навантаженням і вже відомими силами Х1 = А1; Х2 = А2;....Хп = Аn , будують епюри Q, M, N, які будуть кінцевими епюрами поперечних сил, згинальних моментів і повздовжніх сил. Кінцеву епюру згинальних моментів можна отримати і іншим способом, шляхом додавання ординат епюри Мр з відповідними ординатами епюри М1, помноженими на Х1, ординатами епюри М2, помноженими на Х2 , і ординатами епюри Мn помноженими на Хп, тобто: Мкін.= Мр + М1 Х1 +М2 Х2 +...+ Мn Хn. е) Виконують перевірку розрахунку.
45. Перевірка правильності побудови епюр. Одержані кінцеві епюри необхідно перевірити на правильність побудови. Перш за все проводиться статична перевірка. Але вона не дає гарантії правильності розрахунку. Наприклад: якщо зайві невідомі визначені невірно, то епюра побудована по цих даних буде вірною, тому статична перевірка буде задовільнятися. Але сам розв’язок в цілому невірний. Помилки при визначені зайвих невідомих можна виявити за допомогою деформаційної чи кінематичної перевірок. Суть в тому що: переміщення в основній системі по напрямку відкинутих зв’язків від сумісної дії всіх зайвих невідомих і заданого навантаження дорівнюють нулю. Це можна зробити шляхом перемноження кінцевої епюри M на відповідну одиничну M1. При правильному визначенні переміщення будуть рівні нулю. При перемноженні ординат з однаковими знаками використовують слідуючу формулу: ωy = l/6 (ас + 4 fq + вd); де: l – довжина ділянки, на якій перемножаються епюри; ас - добуток крайніх лівих ординат; 4 fq - добуток середніх ординат; Вd - добуток крайніх правих ординат. Якщо ординати, які перемножують з різними знаками, то використовують формулу:
ωy = l/6 (2ас + 2 вd + аd +вс).
46. Тема 8. Нерозрізні балки.
Загальні відомості. Нерозрізною називається розташована на опорах статично невизначена балка, яка має безперервну будову по всій довжині з числом прольотів від двох і більше. Наприклад: По числу прольотів - двох прольотні, трьох прольотні і т.д. Одна з опор робиться шарнірно нерухомою чи защемленою - всі інші шарнірно рухомі. Опори позначають зліва на право арабськими цифрами 0;1;2;3;4;...п, а прольоти L1,L2...Lп. Індекс при довжині кожного прольоту співпадає з номером правої опори цього прольоту. Переріз нерозрізних балок робиться переважно постійним по всій довжині, але, інколи, при великій різниці навантажень в прольотах, вони мають різний переріз. Опори зазвичай розташовуються на одній прямій.
В статичній невизначеності легко переконатися підрахувавши ступінь статичної невизначеності. Для нерозрізних балок знаходиться за формулою: Л=Соп-3 де: Л - ступінь статичної невизначеності; Соп -кількість опорних стержнів; 3 -три рівняння рівноваги статики. Переваги і недоліки. Переваги: 1)легші, ніж розрізні; 2)забезпечують більш надійний зв'язок опор між собою. Недоліки: 1)чуттєвість до нерівномірного осідання опор.
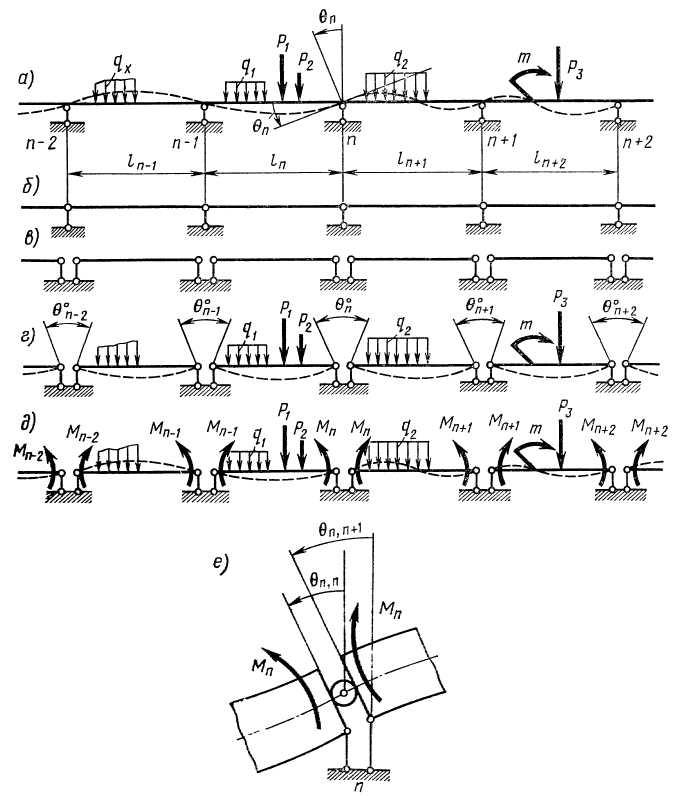
З) Галузь застосування. Широко використовуються при будівництві громадських і промислових будівель, для влаштування перекриття і підкранових балок, залізно дорожніх і автодорожніх мостів. 4) Рівняння трьох моментів. Нехай розглянемо багато прольотну нерозрізну балку на ділянці між опорами n-2 і n+2. Пунктирною лінією показана пружна вісь цієї частини балки і кут повороту перерізу на опорі n. В якості основної системи приймаємо запропоновану французькими інженерами Берто і Клапейроном балку з шарнірами, встановленими над проміжними опорами.
47.
Але ми знаємо, що в перерізі балки, проведеному через центр шарніра згинальний момент дорівнює нулю. Тому шарніри введені у всі проміжні опорні перерізи даної нерозрізної балки, знищують всі згинальні моменти в цих перерізах. Тоді дану систему зручніше розглядати, як систему з окремих балочок на шарнірних опорах. Але ми бачимо, що між основною системою і заданою є розбіжності. Щоб привести основну систему до заданої, навантажуємо основну систему заданим навантаженням.
Тоді, внаслідок наявності шарнірних опор, окремі балочки основної системи вигнуться, а їх опорні перерізи повернуться один відносно другого і утворять так звані кути перелому. Однак в заданій системі пружна вісь балки представляє собою безперервну плавну криву, а в основній - ні. Щоб цій умові задовольняла і основна системи, введемо в її опорні перерізи невідомі попарно рівні, але з протилежними напрямками моменти Мn-2; Мn-1; Мn; Мn+1; Мn+2, які будуть замінювати ті внутрішні зусилля, а саме згинальні моменти в опорних перерізах балки, які виявилися рівними нулю в результаті введення шарнірів. 48. Невідомі моменти прийняті додатніми, тобто направлені так, що повинні викликати розтяг нижніх волокон балки. Одержана в результаті система буде такою ж як задана (якщо дивитись на внутрішні зусилля і переміщення). Тому маючи нерозрізну балку, можемо скласти систему лінійних рівнянь, в кожне з яких ввійдуть три невідомих опорних моменту, які відносяться до кожної пари суміжних прольотів. Всі ці рівняння називаються рівняннями трьох моментів.
|
||||||||
|
|
Последнее изменение этой страницы: 2016-04-18; просмотров: 377; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.191.135.224 (0.008 с.) |