
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Методы и устройства цифровой обработки сигналовСтр 1 из 5Следующая ⇒
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ Технологический институт Федерального государственного образовательного учреждения высшего профессионального образования «Южный федеральный университет» В.И.Литюк
СБОРНИК РЕШЕНИЙ ЗАДАЧ По курсу МЕТОДЫ И УСТРОЙСТВА ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ В РАДИОПРИЕМНЫХ УСТРОЙСТВАХ
Учебное пособие
Таганрог 2009 УДК 621.391.23(075.8) Литюк В.И. Сборник решений задач по курсу «Методы и устройства цифровой обработки сигналов в радиоприемных устройствах»: Учеб. пособие. – Таганрог: Изд-во Технологического института ЮФУ, 2009. – 64 с. ISBN.-.... -.... -. В данном пособии приводятся основные теоретические сведения для типовых задач, с которыми наиболее часто встречаются студенты на практических занятиях и при выполнении контрольных работ. Приведены конкретные математические соотношения, позволяющие проводить решение соответствующих задач. Даются комментарии к решениям рассмотренных типовых задач, встречающихся на практике. Пособие предназначено для студентов старших курсов радиотехнических специальностей и может быть использовано при подготовке дипломных проектов, работ, подготавливаемых для получения академических степеней «Бакалавр техники и технологий» и «Магистр техники и технологий» по направлению 552500 «Радиотехника». Пособие может быть полезным для аспирантов и специалистов, работающих в области цифровой обработки сигналов.
Ил. 22. Библиогр.: 3 назв. Печатается по решению редакционно-издательского совета Технологического института Южного федерального университета. Рецензенты: В.П.Федосов, заведующий кафедрой теоретических основ радиотехники Технологического института в городе Таганроге Южного федерального университета, д-р техн. наук, профессор. В.П.Карелин, заведующий кафедрой математики и информатики Таганрогского института управления и экономики, д-р техн. наук, профессор. Б.Г.Фрадкин, канд. техн. наук, главный специалист ОКБ ОАО «Таганрогский завод “Прибой”». ISBN.-.... -.... -. © Технологический институт Южного федерального университета, 2009
ВВЕДЕНИЕ
В настоящее время цифровая обработка сигналов (ЦОС) позволяет решать в реальном масштабе времени все более широкий круг различных радиотехнических задач. При этом независимо от вида конкретной задачи, при обработке аналоговых сигналов, поступающих с выхода линейных трактов того или иного радиоприемного устройства (РПрУ), при реализации алгоритмов ЦОС всегда осуществляется ряд преобразований [1]. К таким преобразованиям относят:
В данном пособии рассматриваются типовые задачи, которые решаются студентами на практических занятиях и во время самостоятельной проработки курса ЦОС в соответствии с заданиями, приводимыми в [2].
АНАЛОГО-ЦИФРОВОЕ ПРЕОБРАЗОВАНИЕ СИГНАЛОВ
Как известно, на выходе линейного тракта РПрУ аналоговый сигнал представляет собой комплексный узкополосной случайный процесс
где При многоразрядном представлении в цифровой форме процесса (1.1), частота выборок которого определяется условиями теоремы Котельникова, производится обработка реального и мнимого квадратурных отсчетов в виде
Отметим, что огибающая и полная фазовая функция в выражении (1.1), описывающим сигнал в полярной системе координат, также как и квадратурные составляющие в (1.2), описывающие этот же сигнал в декартовой системе координат, связаны между собой соответствующими преобразованиями Гильберта [1].
В реальных условиях полагают, что ширина спектра обрабатываемого процесса полагается равной величине В реальных условиях период дискретизации Очевидно, что чем ближе коэффициент В дальнейшем в рассматриваемых задачах всегда будем полагать, что величина Обычно полагают, что с выхода линейного тракта РПрУ поступает помеховая реализация в виде «белого» шума, характеристики которого определяются его интенсивностью или дисперсией Для выбора характеристик АЦП, которые определяют качество преобразования входного процесса из аналоговой формы в цифровую, необходимо иметь ряд данных. Обычно полагают, что сетка уровней квантования равномерно перекрывает весь динамический диапазон РПрУ. При этом величину шага квантования по амплитуде
где Очевидно, что число уровней квантования АЦП будет
где Связь динамического диапазона входного сигнала
Здесь знак Связь динамического диапазона входного сигнала
Число децибел динамического диапазона
Обычно вместо выражения (1.7) пользуются при расчетах приближенным значением
Тогда с учетом выражений (1.6) и (1.8) количество разрядов
Число уровней квантования в применяемом АЦП, определяется выражением
Мощность шума квантования, вносимого АЦП в преобразуемый входной сигнал, определяется величиной
где Решая выражение (1.11), получим
Используя выражение (1.12) можно определить величину среднеквадратического отклонения
Если выбрать величину В случае, когда
Максимальная величина аналогового сигнала, которую может преобразовать в цифровой код рассчитанный АЦП, с учетом (1.10), определяется в соответствии с выражением
Пример 1. Рассчитать, сколько разрядов АЦП Количество разрядов
Определим величину дисперсии
Величина среднеквадратического отклонения
Максимальная величина входного сигнала
Таким образом, в результате расчетов получены значения:
Аналогичным образом решаются все задачи в п.10.1.3. в [2].
В том случае, когда нет возможности учесть шум, сопровождающий сигнал, как, например, в системах автоматики, то в этом случае задаются точностью Например, пусть величина Если динамический диапазон входного сигнала в этом случае равен
Следовательно, общее число разрядов
ЛИНЕЙНЫЕ ЦИФРОВЫЕ СИСТЕМЫ
Линейная и круговая свертки 2.1.1. Линейная свертка. Обработка сигналов в линейных цифровых системах осуществляется по алгоритмам, являющимися дискретными аналогами интеграла свертки [1]
или при
где Выражение (2.1) для простоты обозначения переменных часто записывают в форме
Другая форма записи выражения (2.1) имеет вид
или в виде
где знак Линейная свертка (2.1) или (2.2) также носит название апериодической и описывает работу линейных цифровых систем, работающих в режиме «скользящее» окно [1].
Пример 2. Пусть имеем последовательность
Пусть также имеется последовательность
Количество выходных отсчетов
Используя выражение (2.1) вычислим линейную свертку для соответствующих временных значений.
2.1.2. Круговая свертка. Часто та или иная последовательность отсчетов носит периодический характер с периодом Обратное преобразование Фурье выходного спектра с периодом Выражение во временной области для круговой свертки периодического выходного результирующего спектра с периодом
Выражение (2.4) может быть записано в виде
В выражениях (2.5) и (2.6) индексы в круглых скобках при значениях Например, если модуль
Количество отсчетов во времени круговой свертки, как видно из (2.5), равно количеству отсчетов в частотной области, в то время как количество отсчетов линейной свертки в (2.1), зависит от количества отсчетов используемых при расчетах реализаций (импульсной характеристики и входного процесса), ее образующих, минус один отсчет.
Пример 3. Пусть имеем последовательность
Пусть также имеется последовательность
Количество различных выходных отсчетов
В выражении (2.7) видно, что выходные отсчеты для круговой свертки повторяются с периодом
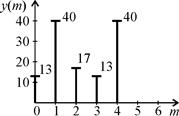
2.1.3. Пример 4. Вычислить и изобразить на рисунке линейную и круговую свертки для двух конечных последовательностей длительностью по три отсчета каждая. Здесь полагается, что величина периода дискретизации Первая конечная последовательность
Вторая конечная последовательность
Линейная свертка. Подставляя в (2.4) численные значения получаем следующие результаты
Следовательно, отсчеты линейной свертки имеют вид
На рис. 1 изображены отсчеты линейной свертки.
Круговая свертка. Подставляя в (2.7) численные значения получаем следующие результаты.
Далее процесс расчета повторяется. Следовательно, отсчеты круговой свертки имеют вид
и они периодически повторяются с периодом На рис. 2 изображены отсчеты круговой свертки.
Видно, что отсчет
Аналогичным образом решаются все задачи в п.10.1.4. в [2]. 2.2. Дискретное преобразование Фурье Вычисление отсчетов дискретного преобразования Фурье
где Раскрывая выражение (2.8), получим формулы для расчета каждого коэффициента Фурье, которые примут вид
В том случае, если
где
Пример 5. Вычислить дискретное преобразование Фурье сигнала согласно выражения (2.8) для значений Для упрощения расчетов сделаем ряд преобразований. Учтем, что на форму огибающей спектра не оказывает влияние величина начальной фазы. В рассматриваемом случае
Очевидно, что результат не изменится, если вместо сигнала
Также учтем, что
На рис. 3 изображен полученный амплитудный спектр
Видно, что центральная частота сигнала расположена на частоте, которая составляет одну четвертую часть частоты дискретизации. Аналогичным образом решаются все задачи в п.10.1.5. в [2]. 2.3. Связь Z -преобразования с преобразованием Лапласа Известно, что изображение по Лапласу временных процессов, а также передаточных функций линейных цепей отображается в виде Для сохранения прежнего количества Переменная
где Из рассмотрения величины Очевидно, необходимо чтобы амплитуда сигнала уменьшалась от отсчета к отсчету. Это соответствует тому, что амплитуда процесса во времени постепенно «затухает», как происходит во всех реальных линейных системах, либо амплитуда не изменялась бы, что соответствует процессу на выходе «идеального» генератора. Для этого необходимо, чтобы величина Если величина При Таким образом, каждая точка на р -плоскости описывается в декартовой системе координат. При этом по оси абсцисс, обозначаемой действительной величиной На Z -плоскости соответствующая точка описывается в полярной системе координат. При этом фазовый угол
Пример 6. По заданным параметрам, полагая Пусть Эти две величины определяют положение соответствующей точки на р -плоскости в декартовой системе координат в соответствии с выражениями:
Положение точки на Z -плоскости в полярной системе координат определится в соответствии с выражениями:
На рис. 4 изображено положение рассмотренной точки
Поскольку положение точек на р -плоскости периодически повторяется, то, следовательно, на Z -плоскости эти точки накладываются друг на друга.
Аналогичным образом решаются все задачи в п.10.1.6. в [2].
Элементарных ячеек 2.4.1. Как известно, основной характеристикой линейной цифровой частотно-избирательной цепи, которая также называется цифровым фильтром (ЦФ), является ее передаточная функция
где Выражение (2.10) при
Отношение полиномов первого порядка в (2.11) описывает передаточную функцию
Числитель в выражении (2.12) описывает передаточную функцию цифровой элементарной нерекурсивной ячейки, а знаменатель – рекурсивной. В том случае, когда в (2.11) полюса и нули являются попарно комплексно-сопряженными, передаточная функция описывает соответственно рекурсивную и нерекурсивную биквадратные ячейки, которые имеют второй порядок каждая. Передаточная функция элементарной биквадратной ячейки имеет вид
где Видно, что биквадратная ячейка, описываемая выражением (2.13), представляет собой каскадное соединение элементарных ячеек первого порядка с комплексно-сопряженными нулями и полюсами. 2.4.2. Нерекурсивная ячейка первого порядка. 2.4.2.1. Существуют нерекурсивные ячейки двух видов. Передаточная функция нерекурсивной ячейки первого вида, полученная непосредственно из (2.12), будет
Импульсная характеристика (ИХ) этой ячейки определяется следующим образом. Перепишем выражение (2.14) в виде
Тогда
Выполняя обратное Z -преобразование над последним выражением, получим дискретную форму записи в виде [1]
Поскольку работа любой цепи начинается в момент времени Тогда выходной отклик
Для определения ИХ любой цепи используется входная импульсная последовательность в виде цифровой « Тогда, при
Подавая входные отсчеты (2.17) в (2.16) получим ИХ нерекурсивной комплексной ячейки первого вида
Таким образом, ИХ нерекурсивной ячейки первого вида в соответствующие моменты времени
|
||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-04-18; просмотров: 528; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.133.137.169 (0.167 с.) |
 аналого-цифровое преобразование аналогового сигнала, поступающего с выхода линейного тракта РПрУ, в цифровую форму;
аналого-цифровое преобразование аналогового сигнала, поступающего с выхода линейного тракта РПрУ, в цифровую форму; , который может быть представлен в виде [1]
, который может быть представлен в виде [1] (1.1)
(1.1) – огибающая процесса (В);
– огибающая процесса (В);  – угловая частота процесса (рад/с);
– угловая частота процесса (рад/с);  – частота, которую обычно полагают равной промежуточной частоте РПрУ (Гц);
– частота, которую обычно полагают равной промежуточной частоте РПрУ (Гц);  – полная фазовая процесса (рад);
– полная фазовая процесса (рад);  – закон фазовой модуляции процесса (рад);
– закон фазовой модуляции процесса (рад);  – начальная фаза (рад).
– начальная фаза (рад). (1.2)
(1.2) , при которой интенсивность спектральных компонент квадратурных составляющих полезного сигнала становится меньше интенсивности аддитивного шума, поступающего на обработку вместе с полезным сигналом.
, при которой интенсивность спектральных компонент квадратурных составляющих полезного сигнала становится меньше интенсивности аддитивного шума, поступающего на обработку вместе с полезным сигналом. , где
, где  коэффициент, показывающий, во сколько раз период дискретизации меньше величины, определяемой из условий выполнения теоремы Котельникова.
коэффициент, показывающий, во сколько раз период дискретизации меньше величины, определяемой из условий выполнения теоремы Котельникова. к единице, чем менее высокие требования предъявляются к аналого-цифровым преобразователям (АЦП).
к единице, чем менее высокие требования предъявляются к аналого-цифровым преобразователям (АЦП). , что соответствует идеальному случаю.
, что соответствует идеальному случаю. (Вт или В2), где
(Вт или В2), где  (В) – величина среднеквадра-тического отклонения.
(В) – величина среднеквадра-тического отклонения. (В) обычно нормируют относительно величины среднеквадра-тического отклонения «белого» шума на выходе линейного тракта РПрУ
(В) обычно нормируют относительно величины среднеквадра-тического отклонения «белого» шума на выходе линейного тракта РПрУ  (В), (1.3)
(В), (1.3) – числовой коэффициент, показывающий, во сколько раз величина
– числовой коэффициент, показывающий, во сколько раз величина  (В) больше, равна или меньше величины
(В) больше, равна или меньше величины  , (1.4)
, (1.4) (В) и
(В) и  (В) – максимальная и минимальная величины входного сигнала;
(В) – максимальная и минимальная величины входного сигнала;  – динамический диапазон входного сигнала в разах относительно величины младшего разряда АЦП.
– динамический диапазон входного сигнала в разах относительно величины младшего разряда АЦП. определяется выражением
определяется выражением . (1.5)
. (1.5) в выражении (1.5) означает ближайшее большее целое число, т.е. не меньшее числа, находящегося внутри обратных квадратных скобок.
в выражении (1.5) означает ближайшее большее целое число, т.е. не меньшее числа, находящегося внутри обратных квадратных скобок. в децибелах определяется выражением
в децибелах определяется выражением (дБ). (1.6)
(дБ). (1.6) . (1.7)
. (1.7) . (1.8)
. (1.8) разрядов. (1.9)
разрядов. (1.9) . (1.10)
. (1.10) (1.11)
(1.11) – плотность распределения амплитуды входного сигнала в пределах шага квантования АЦП, равного
– плотность распределения амплитуды входного сигнала в пределах шага квантования АЦП, равного  . (1.12)
. (1.12) . (1.13)
. (1.13) , т.е. в выражении (1.3)
, т.е. в выражении (1.3)  , то мощность шумов АЦП, добавляемых к шумам, присутствующим на выходе линейного тракта РПрУ, увеличит суммарную мощность на 8,33%.
, то мощность шумов АЦП, добавляемых к шумам, присутствующим на выходе линейного тракта РПрУ, увеличит суммарную мощность на 8,33%. , т.е. в выражении (1.3)
, т.е. в выражении (1.3)  , то суммарная мощность шумов возрастет на 2,1%.
, то суммарная мощность шумов возрастет на 2,1%. (В). (1.14)
(В). (1.14) входного сигнала. Определить погрешности, вносимые АЦП в преобразуемый сигнал (величину дисперсии
входного сигнала. Определить погрешности, вносимые АЦП в преобразуемый сигнал (величину дисперсии  мВ.
мВ. разрядов.
разрядов. = =
= =  В
В

 ;
;  Вт;
Вт;  В;
В;  В.
В. представления полезного сигнала, имеющего минимальную величину
представления полезного сигнала, имеющего минимальную величину  . Тогда, поскольку 1%=0,01<128=2-7, то
. Тогда, поскольку 1%=0,01<128=2-7, то  , а, следовательно, минимальный сигнал преобразуется в АЦП с заданной точностью при использовании
, а, следовательно, минимальный сигнал преобразуется в АЦП с заданной точностью при использовании  разрядов.
разрядов. , то потребуется еще
, то потребуется еще
 .
.

 (2.1)
(2.1) – выходной отклик, состоящий из
– выходной отклик, состоящий из  отсчетов;
отсчетов;  – импульсная характеристика линейной системы, состоящая из
– импульсная характеристика линейной системы, состоящая из  отсчетов;
отсчетов;  – отсчеты входного сигнала, количество которых равно
– отсчеты входного сигнала, количество которых равно  ; величина
; величина  ;
;  – период дискретизации.
– период дискретизации. .
. ,
, , (2.2)
, (2.2) – обозначает операцию свертки.
– обозначает операцию свертки. , состоящую из
, состоящую из  отсчетов в виде
отсчетов в виде . (2.3)
. (2.3) , состоящая из
, состоящая из  отсчетов в виде
отсчетов в виде .
. .
.
 отсчетов. Например, отсчеты в частотной области выборочного спектра входного сигнала с периодом
отсчетов. Например, отсчеты в частотной области выборочного спектра входного сигнала с периодом  отсчетов.
отсчетов. отсчетов будет иметь вид
отсчетов будет иметь вид . (2.5)
. (2.5) . (2.6)
. (2.6) и
и  обозначают, что они берутся по модулю
обозначают, что они берутся по модулю  , то
, то
 .
. , состоящая из
, состоящая из  отсчетов в виде
отсчетов в виде .
. .
.
 .
.






 .
.







 линейной свертки численно совпадает с отсчетом
линейной свертки численно совпадает с отсчетом  осуществляется в соответствии с выражением
осуществляется в соответствии с выражением (2.8)
(2.8) (рад) – бин, т.е. минимальный фазовый сдвиг от отсчета к отсчету за интервал времени, равный периоду дискретизации
(рад) – бин, т.е. минимальный фазовый сдвиг от отсчета к отсчету за интервал времени, равный периоду дискретизации  – номера частотных составляющих, количество которых равно величине
– номера частотных составляющих, количество которых равно величине  – номера отсчетов обрабатываемого сигнала
– номера отсчетов обрабатываемого сигнала  во времени;
во времени;  – выходной отклик в момент времени
– выходной отклик в момент времени  , величина которого равна значению коэффициента Фурье.
, величина которого равна значению коэффициента Фурье. (2.9)
(2.9)
 . При этом расположение спектра на частотной оси, форма которого
. При этом расположение спектра на частотной оси, форма которого 
 и
и  . Величина
. Величина  . Изобразить на рисунке полученный спектр (в виде сплошных линий) и его огибающую (пунктиром).
. Изобразить на рисунке полученный спектр (в виде сплошных линий) и его огибающую (пунктиром). (рад). Тогда сигнал может быть переписан в виде
(рад). Тогда сигнал может быть переписан в виде .
. рассматривать сигнал
рассматривать сигнал .
. Воспользуемся выражениями (2.9) и определим величину бина для данной задачи, которая будет
Воспользуемся выражениями (2.9) и определим величину бина для данной задачи, которая будет  (рад).
(рад).
 в виде сплошных линий, что соответствует отклику соответствующих частотно-избирательных цепей, вычисляющих дискретное преобразование Фурье, а пунктирными линиями – его огибающая.
в виде сплошных линий, что соответствует отклику соответствующих частотно-избирательных цепей, вычисляющих дискретное преобразование Фурье, а пунктирными линиями – его огибающая.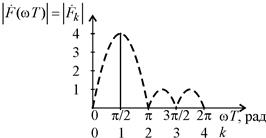
 точек в р- плоскости в ее левой части. При дискретизации происходит «размножение» этих точек с периодом
точек в р- плоскости в ее левой части. При дискретизации происходит «размножение» этих точек с периодом  . Это может быть отображено на р -плоскости в виде бесконечного множества, повторяющихся с периодом
. Это может быть отображено на р -плоскости в виде бесконечного множества, повторяющихся с периодом  , расположенную в Z -плоскости.
, расположенную в Z -плоскости. в р -плоскости связана с переменной
в р -плоскости связана с переменной  ,
, ;
;  видно, что она состоит из модуля, равного величине
видно, что она состоит из модуля, равного величине  и показывающего, как изменяется амплитуда функции от отсчета к отсчету, и величины
и показывающего, как изменяется амплитуда функции от отсчета к отсчету, и величины  , показывающей, как изменяется фазовый угол этой амплитуды от отсчета к отсчету.
, показывающей, как изменяется фазовый угол этой амплитуды от отсчета к отсчету. .
. , то в этом случае амплитуда процесса будет нарастать от отсчета к отсчету, что противоречит работе реальных пассивных линейных систем.
, то в этом случае амплитуда процесса будет нарастать от отсчета к отсчету, что противоречит работе реальных пассивных линейных систем. , т.е. тогда, когда величина
, т.е. тогда, когда величина  , переменная
, переменная  . Величина обратная переменной
. Величина обратная переменной  и описывает цифровой элемент задержки, осуществляющий задержку отсчета на период дискретизации
и описывает цифровой элемент задержки, осуществляющий задержку отсчета на период дискретизации  , откладывается величина
, откладывается величина  (рад/с).
(рад/с). (рад) откладывается от оси абсцисс. Расстояние от точки, из которой начинается ось абсцисс, до местонахождения искомой точки по радиусу под углом
(рад) откладывается от оси абсцисс. Расстояние от точки, из которой начинается ось абсцисс, до местонахождения искомой точки по радиусу под углом  .
. задано отрицательной величиной.
задано отрицательной величиной. , а
, а  , т.е.
, т.е.  .
. ;
; (рад/с).
(рад/с). (рад);
(рад); .
. на р -плоскости, а на рис. 5 – показан ее переход в положение
на р -плоскости, а на рис. 5 – показан ее переход в положение  на Z -плоскости.
на Z -плоскости.
 , которая представима в виде
, которая представима в виде
 (2.10)
(2.10) – коэффициент пропорциональности;
– коэффициент пропорциональности;  – нули;
– нули;  – полюса;
– полюса;  и
и  – модули
– модули  нуля и
нуля и  и
и  – фазовые углы
– фазовые углы  ;
;  .
. можно представить в виде
можно представить в виде (2.11)
(2.11) цифровой комплексной ячейки первого порядка. Тогда, опуская индекс
цифровой комплексной ячейки первого порядка. Тогда, опуская индекс  , можно записать ее передаточную функцию в виде
, можно записать ее передаточную функцию в виде . (2.12)
. (2.12) (2.13)
(2.13)


 ;
;  ;
;  ;
;  ;
;  .
. . (2.14)
. (2.14) .
. .
. . (2.15)
. (2.15) , то величина
, то величина  .
. из выражения (2.15) для последовательности входных данных
из выражения (2.15) для последовательности входных данных  в каждый
в каждый  момент времени будет
момент времени будет (2.16)
(2.16) -функции», которая представляет собой единичную функцию
-функции», которая представляет собой единичную функцию  в момент времени
в момент времени  , длительностью
, длительностью  (2.17)
(2.17)




