Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Дослідження об’єкту автоматизації
Мета роботи 4.1. Вивчити методику експериментального дослідження статичних і динамічних характеристик об’єкту регулювання. 4.2. Навчитись експериментально визначити основні параметри об'єкту.
Теоретичні відомості Об’єктами автоматичного регулювання називають машини, апарати, технологічне обладнання або їх - сукупність, яким потрібна спеціально організована зовнішня дія для їх функціонування за заданим алгоритмом. В загальному вигляді об’єкт автоматизації характеризується функціональною залежністю
Рис. 4.1. Схематичне зображення об’єкту автоматичного регулювання
Вихідна величина Хвих характеризує стан регульованого параметру /температура, тиск, рівень, густина, концентрація, вологість і інше/ об'єкту. Вхідна величина Хвх характеризує кількість енергії чи речовини, яка необхідна для забезпечення заданого значення регульованого параметру з врахуванням дії збурення F і завади f, які обумовлюють зміну регульованого параметру - це зміна навантаження об'єкту, втрати енергії, сировини за рахунок порушення герметичності і інше. До завад відносять дію не передбачуваних зовнішніх факторів, наприклад, зміна температури оточуючого середовища, зміни напрямку і швидкості вітру, зміни вологості і таке інше. Кількісно Хвх формується спеціальними самодіючими засобами керування - регуляторами. Властивості об’єктів автоматичного регулювання /ОР/ описуються певними рівняннями в статичному /статична характеристика/ динамічному /перехідна характеристика/ режимах. Статична характеристика об'єкту являє собою залежність
де Якщо статична характеристика нелінійна, то при малих відхиленнях вихідної величини може бути лінеаризована, тоді
Перехідна характеристика об'єкту являє собою графік зміни вихідної /регульованої/ величини Хвих в часі, якщо на вхід подається дія одиничної функції Хвх=1(t). Загальний вигляд перехідних характеристик для типових об’єктів наведено на рис. 4.2.
З перехідної характеристики об’єкту визначають важливий параметр – сталу часу Т, яка характеризує інерційні властивості об’єкту. Стала часу Т характеризує час, за який вихідна величина Хвих досягла би нового усталеного значення, якби швидкість зміни була постійною. Практично Т дорівнює часу, який відсікає на осі проекція дотичної до перехідної характеристики між лініями Хвих при t=0 і Хвих при t=∞ в момент зміни /стрибка/ вхідної величини /рис. 4.2а/ або до точки перегину /рис. 4.2 б і в/. Якщо вхідна величина змінюється стрибком від Хвх=0 до номінального значення Хвх.ном, то таку перехідну характеристику називають кривою розгону /рис. 4.2./. З кривої розгону визначають час розгону об’єкту τр, транспортне τтр, перехідне τп, і повне τз запізнення, а також сталу часу Т. Методику визначення τр, τтр, τп, τз і Т показано на рис. 4.2. Перехідний процес вважається закінченим, якщо Хвих = 0,97Хвих.уст. Динамічні властивості об’єкту описуються диференційними рівняннями, передаточними функціями і частотними характеристиками, які в лабораторній роботі не розглядаються і вивчаються а теоретичному курсі. Технологічний процес в об’єкті регулювання завжди зв’язаний з притоком, накопиченням, перетворенням і витратою енергії або речовини. Здатність об’єкту до накопичення енергії чи речовини називають акумулюючою здатністю і її оцінюють коефіцієнтом ємності об’єкту Кс, який дорівнює кількості енергії чи речовини, що вводиться а об’єкт для зміни керованого параметру на одиницю його вимірювання.
Соб – ємність об’єкту; Хвих.зд - задане значення керованого або регульованого параметру.
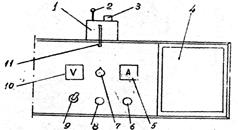
Рис. 4.2 Криві розгону об’єктів: а- інерційний об’єкт без запізнення; б- інерційний об’єкт із перехідним запізненням; в- інерційний об’єкт із перехідним і транспортним запізненням. Експериментальна частина 4.3.1. Ознайомитись з електричною схемою дослідної установки /рис. 4.1./, віднайти усі елементи схеми на передній панелі лабораторної установки /рис. 4.2./. 4.3.2. Перевірити наявність води в бачку 1 по покажчику рівня II /рис. 4.2./ і, якщо рівень менший допустимого /червона риска на покажчику II/, - долити води і її рівень L, записати в таблицю 4.1a.
4.3.3. Дослідити криву розгону /динамічну характеристику /об'єкту. Для цього повернути ручку автотрансформатора Т проти годинникової стрілки до обмеження, встановити пристрій натягу діаграмної стрічки, увімкнути SА, живлення приладу КСМ та приводу діаграмної стрічки, переконатись, що прилад показує і реєструє і в момент переходу пера через лінію відміток часу вимкнути SА, повернути ручку регулювання напруги автотрансформатором за годинниковою стрілкою до обмеження, увімкнути SА Початкове значення температури Тп, величину напруги U і струму І живлення нагрівального елемента, масштаби температури mТ і швидкості mv, діаграмної стрічки записати в таблицю 4.1а. Після закінчення перехідного процесу значення кінцевої температури Тк записати в таблицю Іа. 4.3.4. Встановити. U=0, вимкнути SА, відрізати діаграмну стрічку і приступити до обробки даних експерименту.
Рис. 4.1. Принципова електрична схема лабораторної установки: ОР - об’єкт регулювання, ЕН - електронагрівач, RК - терморезистор, рS - показуючий і реєструючий прилад типу КСМ.
Рис. 4.2. Лицева панель лабораторної установки: 1 – об’єкт регулювання /ОР/; 2 – терморезистор; 3 - електронагрівач; 4 - вимірювальний прилад; 5 – амперметр; 6 – запобіжник; 7 - автотрансформатор; 8 - лампа сигнальна; 9 - вимикач живлення; 10 – вольтметр; 11 - показчик рівня води в бачку. Таблиця 4.1а
|
|||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-04-18; просмотров: 349; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.220.150.237 (0.006 с.) |
 між вихідною Хвих і вихідною Хвх фізичними величинами при наявності збурення і завади F.
між вихідною Хвих і вихідною Хвх фізичними величинами при наявності збурення і завади F.
 (4.1)
(4.1) К - коефіцієнт перетворення.
К - коефіцієнт перетворення. (4.2)
(4.2)