
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Система сходящихся сил. Определение равнодействующей (геометрически и аналитически).Стр 1 из 2Следующая ⇒
Условие равновесия сходящихся сил.
Условия равновесия сист. сходящихся сил: геометрическое: аналитические: åFix=0; åFiy=0; åFiz=0. Теорема о трех непараллельных силах: Если под действием трех сил тело находится в равновесии и линии действия двух сил пересекаются, то все силы лежат в одной плоскости и их линии действия пересекаются в одной точке.
6. Теорема о равновесии трех непараллельных сил. Пример. Теорема о трех непараллельных силах: Если под действием трех сил тело находится в равновесии и линии действия двух сил пересекаются, то все силы лежат в одной плоскости и их линии действия пересекаются в одной точке.
Момент силы относительно точки на плоскости.
Пара сил и ее момент.
Условия эквивалентности пар сил. Свойства пар сил, расположенных в одной плоскости. Пара эквиваленты, если равны их моменты. Св-ва: 1. Действие пары сил на твердое тело не изменится от переноса этой пары в параллельную плоскость. 2. Две пары сил, действующих на одно и то же твердое тело, и лежащие в пересекающихся плоскостях, можно заменить одной эквивалентной парой сил, момент которой равен сумме моментов заданных пар сил.
Сложение пар сил, лежащих в одной плоскости. Условие равновесия пар сил.
Плоская система сил. Приведение произвольной плоской системы сил к заданному центру. Плоская система сил – система сил, расположенных в одной плоскости. Система сил приводится к одной силе – главному вектору и к паре сил, момент которой равен главному моменту. Момент пары сил направлен перпендикулярно к плоскости, в которой лежат силы. Условия равновесия произвольной плоской системы сил. Векторная форма. Для равновесия произвольной системы сил, приложенных к твердому телу, необходимо и достаточно, чтобы главный вектор системы сил был равен нулю и главный момент системы сил относительно любого центра приведения также был равен нулю.
Алгебраическая форма. Для равновесия произвольной системы сил, приложенных к твердому телу, необходимо и достаточно, чтобы три суммы проекций всех сил на оси декартовых координат были равны нулю и три суммы моментов всех сил относительно трех осей координат также были равны нулю.
Момент силы относительно оси. Момент силы относительно оси – скалярная величина, равная моменту проекции этой силы на плоскость, перпендикулярную оси, взятому относительно точки пересечения оси с плоскостью. Момент >0, если смотря навстречу оси, мы видим поворот, который стремится совершить сила направленный против час.стр.
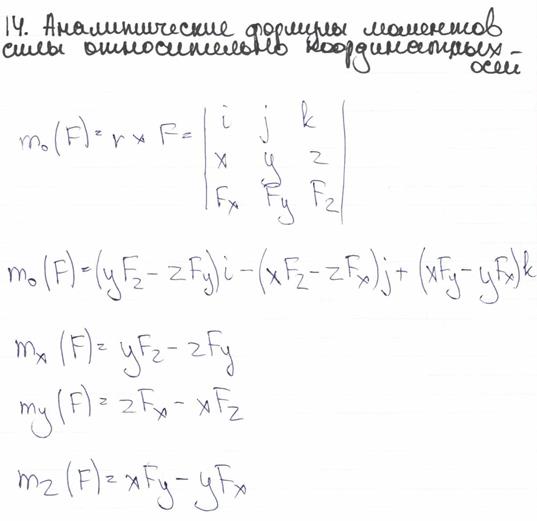
Аналитические формулы моментов силы относительно координатных осей.
Условия равновесия пространственной системы сил. пффффф
16. Теорема о моменте равнодействующей силы (теорема Вариньона). Теорема Вариньона (теорема о моменте равнодействующей силы): момент равнодействующей относительно любой точки = геометрической сумме моментов составляющих сил относительно той же точки.
Центр тяжести твердого тела, плоской фигуры, линии.
Основные задачи кинематики. Основные понятия кинематики.
1) установление матем способов задания движения тела в произвольной выбранной системе отсчета. 2) Опред по заданному движению основных кинемат-х характеристик (скор,ускорен) Кинематика – раздел механики, в котором изучаются движение материальных тел с геометрической точки зрения, без учета массы и действующих на них сил. Способы задания движения точки: 1) естественный, 2) координатный, 3) векторный. Траектория точки – непрерывная кривая, которую описывает точка при своем движении. Естественный сп. указывается траектория точки, закон ее движения по этой траектории, начало и направление отсчета дуговой координаты: s=f(t) – закон движения точки. При прямолинейном движении: х=f(t). Координатный сп. положение точки в пространстве определяется тремя координатами, изменения которых определяют закон движения точки: x=f1(t), y=f2(t), z=f3(t). Векторный сп. положение точки определяется ее радиус-вектором Т.е. траектория –радиус-вектора. Связь между координатным и векторным способами: ( модуль
Переход от координатного способа к естественному: 19. Векторный способ задания движения точки. Определение скорости и ускорения.
20. Координатный способ задания движения точки. Определение траектории, скорости и ускорения.
21. Естественный способ задания движения точки. Определение скорости и ускорения.
|
||||||
|
|
Последнее изменение этой страницы: 2016-04-08; просмотров: 368; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 52.14.150.55 (0.007 с.) |
 .
.












 ,
,

 , проведенным из какого-либо центра.
, проведенным из какого-либо центра. ,
, – орты – единичные вектора, сонаправленные с какой-либо осью)
– орты – единичные вектора, сонаправленные с какой-либо осью) , направляющие косинусы:
, направляющие косинусы:  и т.д.
и т.д. .
.









