Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Описание технологического процесса.
Питание крана осуществляется от сети трехфазного переменного тока напряжением 380В частотой 50Гц, посредством трехжильного гибкого шлангового кабеля. Основные механизмы кранов снабжены электрическими приводами. Противоугонные рельсовые захваты имеют ручные приводы. Управление краном производится из кабины крановщика и осуществляется одним человеком.
Таблица 1 - Параметры питающего напряжения
Электропитание крана - через троллеи, расположенные на балках. Троллеи изготовлены из стальных уголков Б50 х 50 х 5 ГОСТ8509-72. Питание электрооборудования тележки – кабельное. Согласно технической документации завода кран управляется также с пола при помощи дистанционного пульта, подвешенного к кабине крана на тросике и соединенного кабелем, со щитом, установленным в кабине крана. Кнопочное управление электродвигателями позволяет изменять направление вращения и время работы электродвигателя.
Все электродвигатели основных механизмов – асинхронные трехфазные с фазным ротором. Пониженную скорость можно получить только путем кратковременных включений двигателя, создавая электроприводу режим «Старт-стоп». При нажатой кнопке, электродвигатель разгоняет механизм, а при отпущенной – колодочный тормоз затормаживает его. Для затормаживания механизма подъема применяется электрогидравлический толкатель. Он предназначен для отпускания тормозов механизма. Электрогидравлический толкатель состоит из электродвигателя и центробежного насоса. После включения электродвигателя масло масляным насосом нагнетается в подпоршневое пространство, благодаря чему создается гидравлическое давление, которое вызывает смещение поршня вместе со штоком поршня. Максимальное давление масла после включения, достигается только при максимальной скорости вращения двигателя, и с этого момента величина усилия отпускания тормоза становится постоянной. После выключения электродвигателя поршень под действием тормозной системы возвращается в исходное положение. Время, необходимое для возвращения поршня в исходное положение, регулируется при помощи установочного винта, расположенного на боковой стороне электрогидравлического толкателя. Время возвращения составляет 0.5-1.5 сек. Время срабатывания – 0.4 сек.
К устройствам безопасности относятся все оборудование, необходимое для безопасной и безаварийной эксплуатации крана. Для защиты всего электрооборудования крана на портале установлен общий установочный автомат. Цепи управления электродвигателями всех механизмов защищаются установочным автоматом и плавкими предохранителями.
На рисунке 4 представлена кинематическая схема привода механизма подъема груза.
Рисунок 4 - Кинематическая схема механизма подъёма.
Временная диаграмма работы механизма подъема.
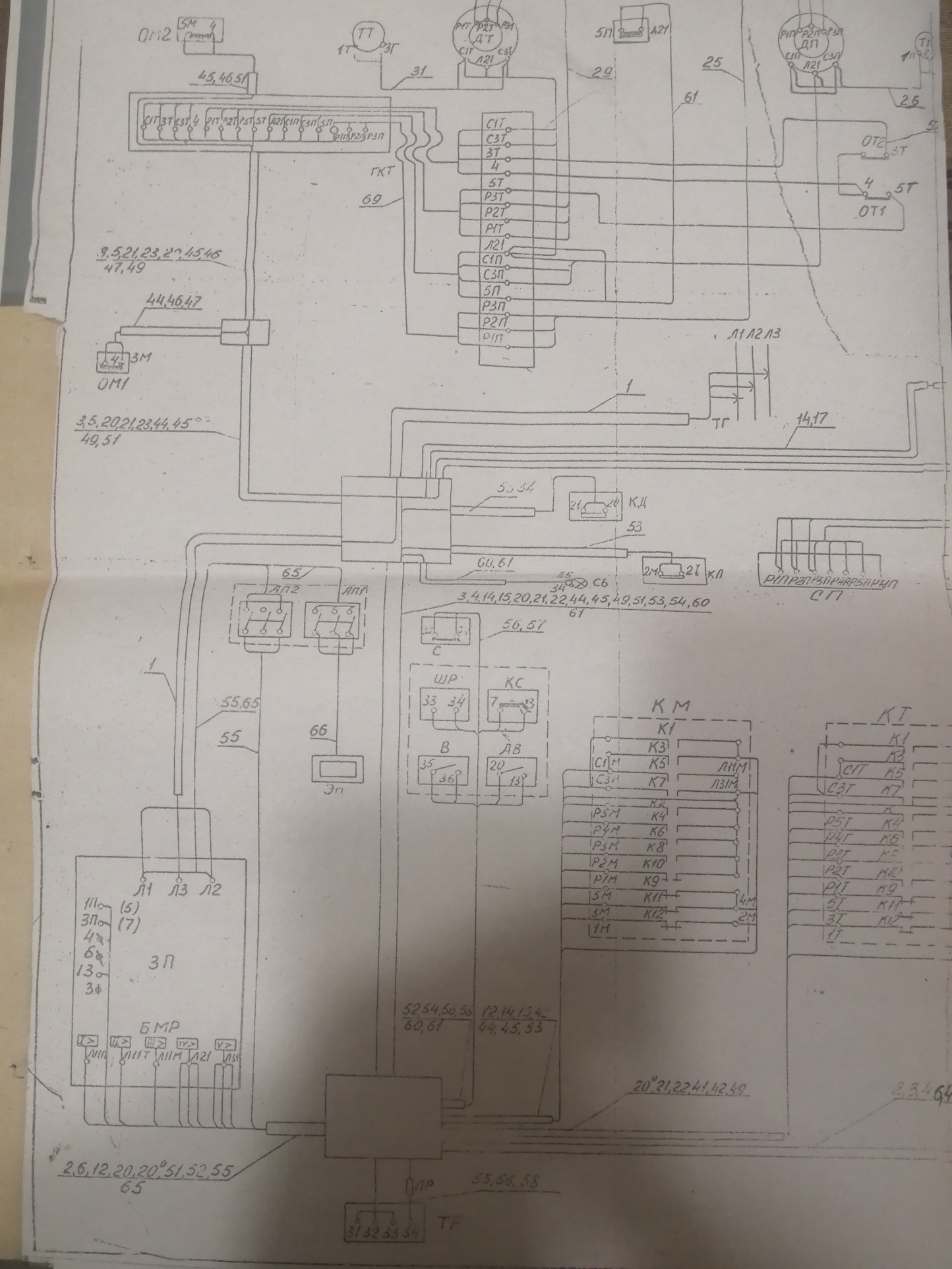
Рисунок 5 - Схема исходной системы электропривода
Рисунок 5 (продолжение) – Схема исходной системы электропривода
Анализ существующей системы электропривода механизма подъёма груза. Пуск и регулирование частоты вращения осуществляется с помощью резисторов в роторной цепи. Для управления приводом механизма подъёма используется магнитный контроллер. На механизм подъёма установлен электромагнитный колодочный тормоз, колодки которого в нормальном состоянии сжаты, а при команде начала движения при поданном напряжении разжимаются. В приводе механизма подъёма крана используется асинхронный двигатель с фазным ротором. Механизм подъёма крана служит для перемещения подвешенного на крюк груза.
|
||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-07-18; просмотров: 63; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.117.156.37 (0.009 с.) |

 - строповка
- строповка – подъём гака
– подъём гака –передвижение
–передвижение –опускание гака
–опускание гака -строповка
-строповка – подъём гака
– подъём гака – передвижение
– передвижение – спуск гака
– спуск гака