Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Промышленный пропорционально-интегрально-дифференцирующий регулятор. ⇐ ПредыдущаяСтр 3 из 3
Для синтеза ПИД-регулятора воспользуемся встроенным помощником в пакете симулинк.
Рисунок 26. Схема САУ для синтеза ПИД-регулятора После настройки получили следующие коэффициенты ПИД-регулятора:
Рисунок 27. График переходной характеристики САУ с ПИД-регулятором
Рисунок 28. Динамическая характеристика замкнутой САУ с ПИД-регулятором по возмущению (F=10) Оценка системы по динамическим показателям качества САУ. В данном пункте нужно оценить быстродействие, перерегулирование и колебательность системы. 1. Перерегулирование системы по управлению
По техническому заданию σх ≤ 40%, следовательно, система удовлетворяет заданным условиям по пункту перерегулирования.
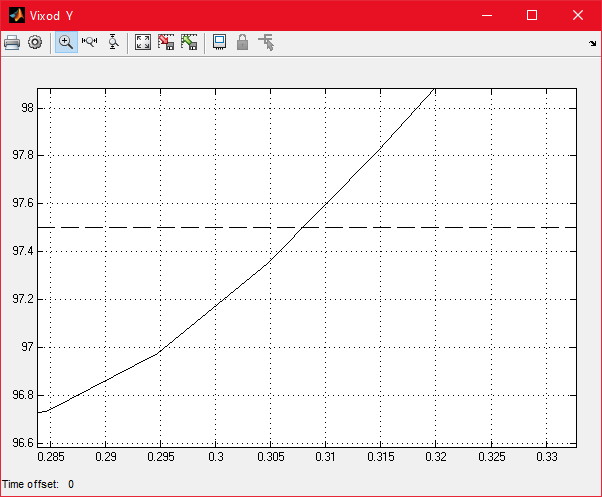
Рисунок 29. График переходной характеристики САУ с ПИД-регулятором (увеличенно) 2. Перерегулирование системы по возмущению
По техническому заданию σF ≤ 100%, следовательно, система удовлетворяет заданным условиям по пункту перерегулирования. 3. Быстродействие системы определяется из условия tпер.пр.≤10Т, следовательно, tПП≤ 6.7 с. Время переходного процесса – время, в течение которого регулируемая величина установится с заданной точностью Точность определяется трубкой допуска (±2.5% от YУСТ). В данном случае время переходного процесса составляет 0.3 секунды.
Рисунок 30. График переходной характеристики САУ с ПИД-регулятором (увеличенно) 4. Колебательность системы определяется числом положительных полуволн во время перерегулирования. По техническому заданию М ≤ (2÷3). Вывод: данный регулятор подходит для данной системы. Построим частотные характеристики системы с ПИД-Регулятором.
Рисунок 31. Динамическая характеристика скорректированной разомкнутой САУ с ПИД-регулятором
Рисунок 32. Логарифмические амплитудночастотные и фазочастотные характеристики (Боде) разомкнутой системы с ПИД-регулятором
Рисунок 33. Частотные характеристики (Найквист) разомкнутой системы с ПИД-регулятором Получим динамические, частотные, логарифмические характеристики с помощью Matlab. % Моделирование ПИД-регулятора Wraz = minreal(simplify(W4*Kol*Kos1)) Wpid = 5.175e-4+tf([2e-3],[1 0])+1.457e-4*tf([100 0],[1 100]);
Wrpid = Wraz*Wpid;
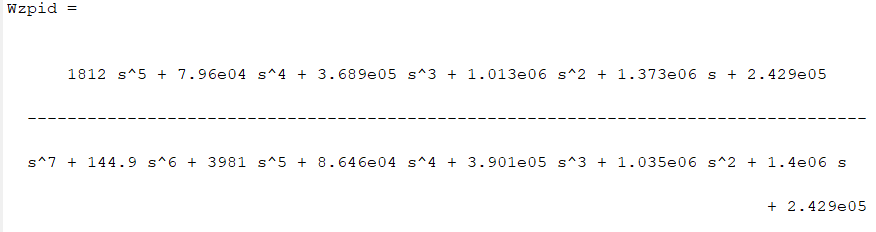
% Определяем замкнутую систему управления Wzpid = minreal(feedback(Wrpid,1))
% Определяем замкнутую систему управления по возмущению Wzfpid = minreal(simplify(-Kol/(1+Wrpid)));
figure(); step(Wrpid*100);
figure(); step(Wzpid*100);
figure(); step(Wzfpid*10);
%Характеристика Боде figure() margin(Wrpid)
%Характеристика Найквиста figure() nyquist(Wrpid)
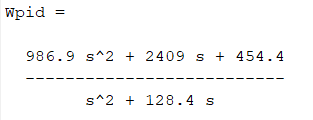
Канонический вид передаточной функции разомкнутой САУ с ПИД-регулятором:
Канонический вид передаточной функции замкнутой САУ с ПИД-регулятором:
Рисунок 34. Динамическая характеристика скорректированной разомкнутой САУ с ПИД-регулятором
Рис.35. График переходной характеристики САУ с ПИД-регулятором Рисунок 36. Динамическая характеристика замкнутой САУ с ПИД-регулятором по возмущению (F=10)
Рисунок 37. Логарифмические амплитудночастотные и фазочастотные характеристики (Боде) разомкнутой системы с ПИД-регулятором
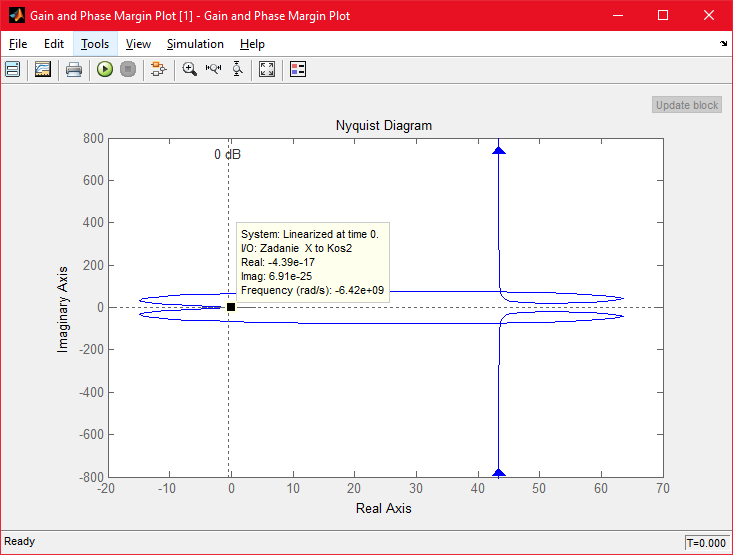
Рисунок 38. Частотные характеристики (Найквист) разомкнутой системы с ПИД-регулятором
СТАТИЧЕСКИЕ ХАРАКТЕРИСИТКИ Замкнутая система по управлению Система, замкнутая по управлению, является астатической, следовательно, при Y=100, задающее значение будет следующим Замкнутая система по возмущению Система является астатической, следовательно, система не будет зависеть от задания х. Разомкнутая система будет зависеть от коэффициента K=6.2
ЗАКЛЮЧЕНИЕ В данной работе мы знакомились со структурной схемой САУ, состоящей из типовых звеньев, охваченных внутренней и внешней обратными связями. Была составлена структурная схема в соответствии с вариантом задания и определены передаточные функции разомкнутой системы, замкнутой системы по управляющему воздействию, системы по возмущающему воздействию. Рассчитаны и построены статические характеристики по управлению и возмущению. Затем, используя MatLab и Simulink, получили графики переходных процессов нескорректированной системы и качественные показатели процесса. Далее рассчитали и подобрали регуляторы, а также получили графики переходных процессов скорректированной системы и качественные показатели системы. Таким образом, мы научились выполнять расчет системы автоматического управления.
|
||||||
|
|
Последнее изменение этой страницы: 2021-05-12; просмотров: 107; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.224.32.86 (0.013 с.) |

 .
.