Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Иркутский национальный исследовательскийСтр 1 из 3Следующая ⇒
ИРКУТСКИЙ НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ Кафедра электроснабжения и электротехники
Допускаю к защите ______________ Руководитель Д.О. Герасимов И.О.Фамилия
АНАЛИЗ И СИНТЕЗ СИСТЕМЫ
к курсовому проекту по дисциплине
ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ 1.007.00.00.ПЗ
Выполнил студент группы ЭПб-15-2 ___________ Д.А. Марчук шифр подпись И.О.Фамилия Нормоконтроль ___________ Д.О. Герасимов подпись И.О.Фамилия Курсовой проект защищен с оценкой ______________
Иркутск 2017
Министерство образования и науки Российской Федерации Федеральное государственное бюджетное образовательное учреждение высшего образования
ИРКУТСКИЙ НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ УТВЕРЖДАЮ Зав. кафедрой __________________
«___»___________2017г.
ЗАДАНИЕ НА КУРСОВОЕ ПРОЕКТИРОВАНИЕ
По курсу Теория автоматического управления Студенту Марчук Дмитрию Антоновичу Тема проекта Анализ и синтез системы автоматического управления Вариант 7. Исходные данные
Рисунок 1. Структурная схема системы автоматического управления Передаточные функции:
Возмущающее воздействие Показатели качества регулирования:
Задание 1. Привести исходную структурную схему к типовой одноконтурной системе автоматического управления. 2. По полученной передаточной функции объекта управления записать: 2.1. линейное дифференциальное уравнение объекта управления и привести его к стандартной форме записи; 2.2. получить описание объекта управления через нули полюса и коэффициенты усиления системы;
2.3. получить описание объекта управления в форме матрицы пространства состояния. 3. Найти передаточную функцию системы по задающему и возмущающему воздействию. Записать уравнение динамики АСУ. 4. Исследовать объект управления на устойчивость алгебраическими и частотными методами, определить запас устойчивости. 5. Выбрать закон управления и произвести расчет настроечных параметров регулятора по заданным параметрам качества управления.
Рекомендуемая литература: 1. Теория автоматического управления. Методические указания и варианты заданий для практических занятий. [Электронный ресурс] /Сост. Г.Г. Гоппе, З.А. Федорова. - Иркутск: Изд-во НИ ИрГТУ, 2012.- 42 с.- Электрон. опт. диск (CD-ROM). 2. Теория автоматического управления. Методические указания для самостоятельной работы студентов. [Электронный ресурс] /Сост. Г.Г. Гоппе, З.А. Федорова. - Иркутск: Изд-во НИ ИрГТУ, 2012.- 71 с.- Электрон. опт. диск (CD-ROM). 3. Гоппе Г.Г., Федорова З.А. Теория автоматического управления. Методическое пособие и варианты заданий для курсового проектирования студентам специальностей: 1804 – Электропривод и автоматика промышленных и технологических комплексов; 1807 – Электрический транспорт– Иркутск, Изд-во ИрГТУ, 2003 г.- 26 c.
Дата выдачи задания «___»____________2017 г.
Дата представления проекта руководителю «___»____________2017 г.
Руководитель курсового проектирования ___________ Герасимов Д.О. СОДЕРЖАНИЕ ВВЕДЕНИЕ..................................................................................................... 5 ОСНОВНАЯ ЧАСТЬ...................................................................................... 6 1.Приведение исходной структурной схемы к типовой одноконтурной системе автоматического управления....................................................................... 6 2.Способы описания объекта управления................................................... 8 2.1 Стандартная форма записи дифференциального уравнения............ 8 2.2 Математическое описание объекта управления через нули полюса и коэффициенты усиления системы.................................................................................... 10 2.3 Математическое описание объекта управления в виде модели пространства состояния................................................................................................. 11
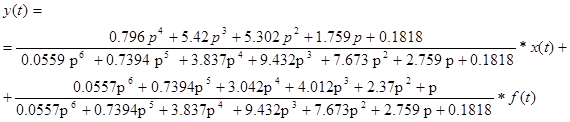
3. Нахождение передаточной функции по задающему и возмущающему воздействию. Уравнение динамики АСУ......................................................................... 14 3.1 Передаточная функция системы по задающему воздействию........ 14 3.2 Передаточная функция типовой одноконтурной системы управления по возмущающему воздействию.................................................................. 16 3.3 Уравнение динамики АСУ................................................................ 17 4.Исследование объекта управления на устойчивость............................. 18 4.1 Алгебраический критерий устойчивости Гурвица.......................... 18 4.2 Частотный критерий Михайлова...................................................... 21 ЗАКЛЮЧЕНИЕ............................................................................................. 25 СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ...................................... 26 ВВЕДЕНИЕ
ТАУ (теория автоматического управления) – научная дисциплина, предназначенная для разработки общих принципов автоматического управления, а также матодов анализа и синтеза системы. Современные системы автоматического управления (САУ) представляют собой сложные комплексы взаимодействующих технологических устройств и элементов, работа которых основана на различных физических принципах. Различно также их конструктивное выполнение и технологические характеристики. Несмотря на многообразие САУ и входящих в них элементов, последние могут быть сведены к нескольким основным типам, различающимся по назначению и взаимодействию в системах управления (СУ). Целью курсовой работы является приобретение знаний и навыков в области автоматики. Необходимо уметь: понимать устройство и принципы действия систем автоматического управления (САУ), определять характеристики объектов управления и элементов САУ, оценивать качество работы САУ по устойчивости и показателям переходных процессов, определять значения настроечных параметров САУ, обеспечивающих требуемое качество работы САУ. В качестве исходных данных для курсовой работы приняты параметры элементов и устройств, входящих в данную систему. Основными задачами курсовой работы являются: - составление по принципиальной схеме функциональной схемы; - составление математической модели в форме структурной схемы; - исследование системы на устойчивость необходимыми критериями; - построение переходных процессов для анализа качества процесса регулирования системы; - оценка точности процесса регулирования. ОСНОВНАЯ ЧАСТЬ
Уравнение динамики АСУ
ЗАКЛЮЧЕНИЕ Умение разделять САУ на основные функциональные элементы и составлять функциональные и структурные схемы способствует ясности представлений о физических процессах, происходящих в системе, и имеет большое значение для дальнейшего исследования и расчета систем. Целью курсовой работы по дисциплине «Теория управления» является закрепление теоретических знаний и овладение навыками анализа и синтеза систем автоматического управления объектами на примере металлорежущих станков и промышленных роботов. При выполнении курсовой работы приобретается опыт разработки и расчета САУ производственными процессами и отдельными объектами в машиностроении. В курсовой работе были решены поставленные задачи:
1. Исходная структурная схема приведена к типовой одноконтурной системе автоматического управления. 2. Линейное дифференциальное уравнение объекта, определенное по передаточной функции управления было приведено к стандартной форме записи; 3. Получено описание объекта управления через нули полюса и коэффициенты усиления системы; 4. Получено описание объекта управления в форме матрицы пространства состояния. 5. Найдена передаточную функцию системы по задающему и возмущающему воздействию. Записано уравнение динамики АСУ. 6. Объект управления исследован на устойчивость алгебраическими и частотными методами, был определен запас устойчивости. 7. Выбран закон управления и произведен расчет настроечных параметров регулятора по заданным параметрам качества управления.
СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ 1. Теория автоматического управления. Методические указания и варианты заданий для практических занятий. [Электронный ресурс] /Сост. Г.Г. Гоппе, З.А. Федорова. - Иркутск: Изд-во НИ ИрГТУ, 2012.- 42 с.- Электрон. опт. диск (CD-ROM). 2. Теория автоматического управления. Методические указания для самостоятельной работы студентов. [Электронный ресурс] /Сост. Г.Г. Гоппе, З.А. Федорова. - Иркутск: Изд-во НИ ИрГТУ, 2012.- 71 с.- Электрон. опт. диск (CD-ROM). 3. Гоппе Г.Г., Федорова З.А. Теория автоматического управления. Методическое пособие и варианты заданий для курсового проектирования студентам специальностей: 1804 – Электропривод и автоматика промышленных и технологических комплексов; 1807 – Электрический транспорт– Иркутск, Изд-во ИрГТУ, 2003 г.- 26 c.
ИРКУТСКИЙ НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ Кафедра электроснабжения и электротехники
Допускаю к защите ______________ Руководитель Д.О. Герасимов И.О.Фамилия
АНАЛИЗ И СИНТЕЗ СИСТЕМЫ
к курсовому проекту по дисциплине
ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ 1.007.00.00.ПЗ
Выполнил студент группы ЭПб-15-2 ___________ Д.А. Марчук шифр подпись И.О.Фамилия Нормоконтроль ___________ Д.О. Герасимов подпись И.О.Фамилия
Курсовой проект защищен с оценкой ______________
Иркутск 2017
Министерство образования и науки Российской Федерации Федеральное государственное бюджетное образовательное учреждение высшего образования
ИРКУТСКИЙ НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ УТВЕРЖДАЮ Зав. кафедрой __________________
«___»___________2017г.
ЗАДАНИЕ НА КУРСОВОЕ ПРОЕКТИРОВАНИЕ
По курсу Теория автоматического управления Студенту Марчук Дмитрию Антоновичу Тема проекта Анализ и синтез системы автоматического управления Вариант 7. Исходные данные
Рисунок 1. Структурная схема системы автоматического управления Передаточные функции:
Возмущающее воздействие Показатели качества регулирования:
Задание 1. Привести исходную структурную схему к типовой одноконтурной системе автоматического управления. 2. По полученной передаточной функции объекта управления записать: 2.1. линейное дифференциальное уравнение объекта управления и привести его к стандартной форме записи; 2.2. получить описание объекта управления через нули полюса и коэффициенты усиления системы; 2.3. получить описание объекта управления в форме матрицы пространства состояния. 3. Найти передаточную функцию системы по задающему и возмущающему воздействию. Записать уравнение динамики АСУ. 4. Исследовать объект управления на устойчивость алгебраическими и частотными методами, определить запас устойчивости. 5. Выбрать закон управления и произвести расчет настроечных параметров регулятора по заданным параметрам качества управления.
Рекомендуемая литература: 1. Теория автоматического управления. Методические указания и варианты заданий для практических занятий. [Электронный ресурс] /Сост. Г.Г. Гоппе, З.А. Федорова. - Иркутск: Изд-во НИ ИрГТУ, 2012.- 42 с.- Электрон. опт. диск (CD-ROM). 2. Теория автоматического управления. Методические указания для самостоятельной работы студентов. [Электронный ресурс] /Сост. Г.Г. Гоппе, З.А. Федорова. - Иркутск: Изд-во НИ ИрГТУ, 2012.- 71 с.- Электрон. опт. диск (CD-ROM). 3. Гоппе Г.Г., Федорова З.А. Теория автоматического управления. Методическое пособие и варианты заданий для курсового проектирования студентам специальностей: 1804 – Электропривод и автоматика промышленных и технологических комплексов; 1807 – Электрический транспорт– Иркутск, Изд-во ИрГТУ, 2003 г.- 26 c.
Дата выдачи задания «___»____________2017 г.
Дата представления проекта руководителю «___»____________2017 г.
Руководитель курсового проектирования ___________ Герасимов Д.О. СОДЕРЖАНИЕ
ВВЕДЕНИЕ..................................................................................................... 5 ОСНОВНАЯ ЧАСТЬ...................................................................................... 6 1.Приведение исходной структурной схемы к типовой одноконтурной системе автоматического управления....................................................................... 6 2.Способы описания объекта управления................................................... 8 2.1 Стандартная форма записи дифференциального уравнения............ 8 2.2 Математическое описание объекта управления через нули полюса и коэффициенты усиления системы.................................................................................... 10 2.3 Математическое описание объекта управления в виде модели пространства состояния................................................................................................. 11 3. Нахождение передаточной функции по задающему и возмущающему воздействию. Уравнение динамики АСУ......................................................................... 14 3.1 Передаточная функция системы по задающему воздействию........ 14 3.2 Передаточная функция типовой одноконтурной системы управления по возмущающему воздействию.................................................................. 16 3.3 Уравнение динамики АСУ................................................................ 17 4.Исследование объекта управления на устойчивость............................. 18 4.1 Алгебраический критерий устойчивости Гурвица.......................... 18 4.2 Частотный критерий Михайлова...................................................... 21 ЗАКЛЮЧЕНИЕ............................................................................................. 25 СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ...................................... 26 ВВЕДЕНИЕ
ТАУ (теория автоматического управления) – научная дисциплина, предназначенная для разработки общих принципов автоматического управления, а также матодов анализа и синтеза системы. Современные системы автоматического управления (САУ) представляют собой сложные комплексы взаимодействующих технологических устройств и элементов, работа которых основана на различных физических принципах. Различно также их конструктивное выполнение и технологические характеристики. Несмотря на многообразие САУ и входящих в них элементов, последние могут быть сведены к нескольким основным типам, различающимся по назначению и взаимодействию в системах управления (СУ). Целью курсовой работы является приобретение знаний и навыков в области автоматики. Необходимо уметь: понимать устройство и принципы действия систем автоматического управления (САУ), определять характеристики объектов управления и элементов САУ, оценивать качество работы САУ по устойчивости и показателям переходных процессов, определять значения настроечных параметров САУ, обеспечивающих требуемое качество работы САУ. В качестве исходных данных для курсовой работы приняты параметры элементов и устройств, входящих в данную систему. Основными задачами курсовой работы являются: - составление по принципиальной схеме функциональной схемы; - составление математической модели в форме структурной схемы; - исследование системы на устойчивость необходимыми критериями; - построение переходных процессов для анализа качества процесса регулирования системы; - оценка точности процесса регулирования. ОСНОВНАЯ ЧАСТЬ
|
|||||||||
|
|
Последнее изменение этой страницы: 2021-05-12; просмотров: 177; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.145.191.169 (0.068 с.) |

 ,
,  ,
,  ,
,  ,
,  ,
,  ,
, 
 .
. ,
,  ,
,  .
.