
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Выбор структуры манипулятораСтр 1 из 2Следующая ⇒
Содержание Задание …………………………………………………………………………….2 Введение …………………………………………………………………………..3 1. Выбор структуры манипулятора …………………………………………...4 1.1. Анализ существующих конструкций манипуляционных механизмов промышленных роботов………………………………………………………….4 1.2. Выбор структуры проектируемого манипулятора…………………………5 2. Предварительный расчёт звеньев манипулятора ………………………..6 2.1. Определение величины деформации………………………………………..6 2.2. Выбор геометрических характеристик сечений…………………………..8 3. Кинематический расчёт манипулятора …………………………………..10 3.1. Расчёт модуля выдвижения руки…………………………………………..10 3.2. Расчёт модуля подъёма……………………………………………………..12 3.3. Расчёт модуля поворота…………………………………………………….14 4. Силовой расчёт манипулятора …………………………………………….16 4.1. Силовой расчёт модулей манипулятора…………………………………...16 4.2. Расчёт направляющих………………………………………………………24 4.3. Расчёт подшипников………………………………………………………..26 5. Расчёт и выбор приводов …………………………………………………...28 5.1. Расчёт привода механизма поворота………………………………………28 5.2. Расчёт привода выдвижения руки…………………………………………30 5.3. Расчёт привода подъёма манипулятора…………………………………...31 6. Проверочный расчёт манипулятора ……………………………………...32 Заключение ……………………………………………………………………...33 Список использованной литературы ………………………………………..34
ЗАДАНИЕ Спроектировать манипулятор промышленного робота для загрузки пресса со следующими характеристиками:
Номинальная грузоподъёмность 5 кг Число рук одна Погрешность позиционирования Максимальный радиус зоны обслуживания 250 мм Форма заготовки цилиндрическая Положение днища в исходной позиции горизонтальное Уравнения движений звеньев при разгоне и торможении
Уравнения движений звеньев при разгоне и торможении
Максимальные значения скоростей звеньев при движении
Величины перемещений и угла поворота
ВВЕДЕНИЕ Курсовой проект по дисциплине «Механика манипуляционных устройств» является важным этапом в подготовке инженеров-электромехаников по специальности «Роботы и робототехнические системы», специализирующиеся в вопросах создания, эксплуатации и ремонта автоматических манипуляторов и роботизированных технологических комплексов. Проект является творческой работой, в которой студент должен применить полученные им знания по дисциплинам «Теоретическая механика», «Сопротивление материалов», «Материаловедение», «Метрология, стандартизация и сертификация», «Детали машин и основы конструирования». Проектирование должно быть основано на использовании современных достижений робототехники и манипуляторостроения. Технические решения, применяемые при проектировании, должны быть подкреплены инженерными расчётами. Студент несёт полную ответственность за принятые решения, правильность и точность расчётов и графического оформления. Цель курсового проектирования – развить навыки самостоятельного решения конструкторских задач по выбранной специальности; закрепить теоретические основы и методы расчёта, конструирования и создания манипуляционных устройств промышленных роботов, манипуляторов и автооператоров; выработать умение разбираться в технической и справочной литературе, принимать технически и экономически обоснованные решения. В задачи курсового проекта входят: приобретение студентами знаний в области проектирования манипуляторов промышленных роботов, автооператоров многоцелевых станков с ЧПУ и манипуляционных систем, применяемых в автоматических производствах; приобретение студентами навыков в структурном, кинематическом и динамическом анализе и синтезе манипуляционных устройств, в выполнении проектно-конструкторских и расчётных работ при их создании. Основной темой курсового проекта является проект манипулятора транспортного или операционного промышленного робота с подробной разработкой конструкции кинематических пар, звеньев механизма и элементов привода.
ПРЕДВАРИТЕЛЬНЫЙ РАСЧЁТ ЗВЕНЬЕВ МАНИПУЛЯТОРА НА ЖЁСТКОСТЬ Расчёт модуля подъёма руки
Для расчета модуля подъема составим систему уравнений, аналогичную системе расчёта модуля выдвижения руки, но с учетом того, что Z = 0,05 м.
Вычислим время разгона, торможения и установившегося движения, с учетом того, что совершается подъем:
Тогда:
Аналогично получим постоянные коэффициенты
Следовательно:
Построим графики скоростей
Рис. 12. График скоростей для подъёма руки
Рис. 13. График ускорений для подъёма руки
Расчёт модуля поворота руки
Для расчета модуля подъема составим систему уравнений, аналогичную системе расчёта выдвижения руки, но с учетом того, что j = p рад.
Вычислим время разгона, торможения и установившегося движения, с учетом того, что совершается поворот:
Тогда:
Аналогично получим постоянные коэффициенты
Следовательно:
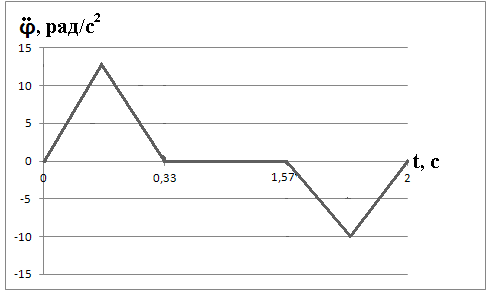
Построим графики скоростей
Рис. 14. График скоростей для поворота руки
Рис. 15. График ускорений для поворота руки
СИЛОВОЙ РАСЧЁТ МАНИПУЛЯТОРА Расчёт направляющих
Рассчитаем длину направляющей для горизонтального звена, расчетная схема которого представлена на рис. 21:
Рис. 21. Расчётная схема горизонтальных направляющих
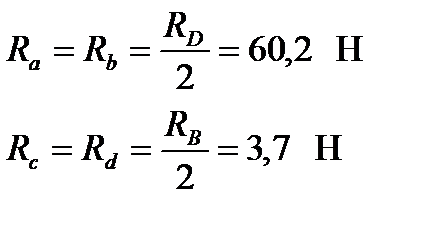
Определим суммарные реакции в точках a, b, c, d:
Расчет будем вести по наиболее нагруженной направляющей (а и b): для них будет х = 0,12 м; m = 0,1.
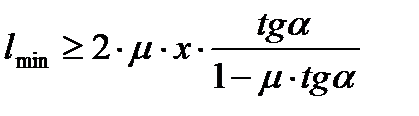
Длину направляющей определим по формуле:
принимаем
Рассчитаем длину направляющей для горизонтального звена, расчетная схема которого представлена на рис. 22:
Рис. 22. Расчётная схема вертикальных направляющих
Определим значение силы F:
Определим суммарные реакции в точках e, f, g, h:
Расчет будем вести по наиболее нагруженной направляющей (g и h): для них будет х = 0,04 м; m = 0,1.
Длина направляющей:
принимаем
Расчёт подшипников
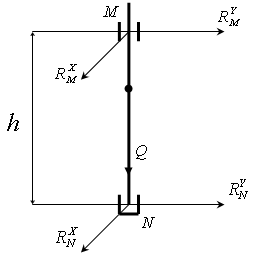
Для расчета подшипников в модуле поворота воспользуемся расчетной схемой, показанной на рис. 23:
Рис. 23. Расчётная схема подшипников в модуле поворота
Данные, необходимые для расчета: h = 0,4 м; Q = 87 Н; суммарные радиальные нагрузки Fr1 = 124,8 H; Fr2 = 37,8 H. Осевые составляющие радиальных усилий шариковых радиально-упорных подшипников найдем по формулам [3]:
где е = 0,68 – коэффициент осевого нагружения для подшипников с a = 260. В этом случае: S1 > S2; FA = Q > S1 – S2, тогда:
Рассмотрим «верхний» подшипник:
значит, осевую нагрузку не учитываем. Эквивалентная нагрузка определится по формуле:
где V = 1 – при вращении внутреннего кольца; ks = 1,2 – коэффициент безопасности; kT = 1 – температурный коэффициент.
Рассмотрим «нижний» подшипник:
значит осевую нагрузку учитываем. Эквивалентная нагрузка определится по формуле:
где х = 0,41 – коэффициент радиального нагружения; у = 0,87 – коэффициент осевого нагружения.
Выбираем «верхний» подшипник 36204 с динамической грузоподъемностью С = 15,7 кН. Из конструктивных соображений выбираем «нижний» подшипник 36204 с динамической грузоподъемностью С = 15,7 кН.
Расчетные долговечности определим по наиболее нагруженному «верхнему» подшипнику: Расчетная долговечность (млн.об) определится по формуле:
Расчетная долговечность (в часах) определится по формуле:
где n = 16,67 об/мин – максимальная частота вращения подшипника.
РАСЧЁТ И ВЫБОР ПРИВОДОВ ЗАКЛЮЧЕНИЕ
В ходе работы был спроектирован манипулятор промышленного робота для загрузки пресса согласно заданию. По данным расчёта был выполнен комплект чертежей манипулятора. Произведен расчет манипулятора на жесткость, а так же силовой расчет его модулей, направляющих и подшипников. Произведен кинематический расчет модулей, расчет и выбор приводов механизмов поворота, выдвижения руки, подъема. Технические решения, применяемые при проектировании, подкреплены инженерными расчетами. СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
1. Анурьев В.И. Справочник конструктора машиностроителя. – М.: Машиностроение, 1979. - 836с. 2. Конструирование манипуляционных механизмов: методическое пособие по выполнению курсового проекта /Б.Б. Пономарёв. – Иркутск, 1995. - 56с. 3. Белянин П. Н. Промышленные роботы и их применение: Робототехника для машиностроения.- 2-е издание, переработанное и дополненное - М.: Машиностроение, 1983,- 311с. 4. Козырев Ю. Г. Промышленные роботы: Справочник – М.: Машиностроение, 1988.- 376с. 5. Проектирование и разработка промышленных роботов: Под общей редакцией Я. А. Шифрина, П. Н. Белянина. М.: Машиностроение, 1989.-272с.: ил. 6. Ю. М. Соломенцев, К. П. Жуков и др Промышленные роботы в машиностроении. Альбом схем и чертежей: Учебное пособие для технических вузов. М.: Машиностроение, 1986.- 140с. Содержание Задание …………………………………………………………………………….2 Введение …………………………………………………………………………..3 1. Выбор структуры манипулятора …………………………………………...4 1.1. Анализ существующих конструкций манипуляционных механизмов промышленных роботов………………………………………………………….4
1.2. Выбор структуры проектируемого манипулятора…………………………5 2. Предварительный расчёт звеньев манипулятора ………………………..6 2.1. Определение величины деформации………………………………………..6 2.2. Выбор геометрических характеристик сечений…………………………..8 3. Кинематический расчёт манипулятора …………………………………..10 3.1. Расчёт модуля выдвижения руки…………………………………………..10 3.2. Расчёт модуля подъёма……………………………………………………..12 3.3. Расчёт модуля поворота…………………………………………………….14 4. Силовой расчёт манипулятора …………………………………………….16 4.1. Силовой расчёт модулей манипулятора…………………………………...16 4.2. Расчёт направляющих………………………………………………………24 4.3. Расчёт подшипников………………………………………………………..26 5. Расчёт и выбор приводов …………………………………………………...28 5.1. Расчёт привода механизма поворота………………………………………28 5.2. Расчёт привода выдвижения руки…………………………………………30 5.3. Расчёт привода подъёма манипулятора…………………………………...31 6. Проверочный расчёт манипулятора ……………………………………...32 Заключение ……………………………………………………………………...33 Список использованной литературы ………………………………………..34
ЗАДАНИЕ Спроектировать манипулятор промышленного робота для загрузки пресса со следующими характеристиками:
Номинальная грузоподъёмность 5 кг Число рук одна Погрешность позиционирования Максимальный радиус зоны обслуживания 250 мм Форма заготовки цилиндрическая Положение днища в исходной позиции горизонтальное Уравнения движений звеньев при разгоне и торможении
Уравнения движений звеньев при разгоне и торможении
Максимальные значения скоростей звеньев при движении
Величины перемещений и угла поворота
ВВЕДЕНИЕ Курсовой проект по дисциплине «Механика манипуляционных устройств» является важным этапом в подготовке инженеров-электромехаников по специальности «Роботы и робототехнические системы», специализирующиеся в вопросах создания, эксплуатации и ремонта автоматических манипуляторов и роботизированных технологических комплексов. Проект является творческой работой, в которой студент должен применить полученные им знания по дисциплинам «Теоретическая механика», «Сопротивление материалов», «Материаловедение», «Метрология, стандартизация и сертификация», «Детали машин и основы конструирования». Проектирование должно быть основано на использовании современных достижений робототехники и манипуляторостроения. Технические решения, применяемые при проектировании, должны быть подкреплены инженерными расчётами. Студент несёт полную ответственность за принятые решения, правильность и точность расчётов и графического оформления. Цель курсового проектирования – развить навыки самостоятельного решения конструкторских задач по выбранной специальности; закрепить теоретические основы и методы расчёта, конструирования и создания манипуляционных устройств промышленных роботов, манипуляторов и автооператоров; выработать умение разбираться в технической и справочной литературе, принимать технически и экономически обоснованные решения.
В задачи курсового проекта входят: приобретение студентами знаний в области проектирования манипуляторов промышленных роботов, автооператоров многоцелевых станков с ЧПУ и манипуляционных систем, применяемых в автоматических производствах; приобретение студентами навыков в структурном, кинематическом и динамическом анализе и синтезе манипуляционных устройств, в выполнении проектно-конструкторских и расчётных работ при их создании. Основной темой курсового проекта является проект манипулятора транспортного или операционного промышленного робота с подробной разработкой конструкции кинематических пар, звеньев механизма и элементов привода.
ВЫБОР СТРУКТУРЫ МАНИПУЛЯТОРА
|
|||||||||
|
|
Последнее изменение этой страницы: 2021-05-27; просмотров: 95; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.19.244.187 (0.087 с.) |
 0,1 мм
0,1 мм








 и
и  :
:



 (рис. 12) и ускорений
(рис. 12) и ускорений  (рис. 13):
(рис. 13):






 и
и  :
:



 (рис. 14) и ускорений
(рис. 14) и ускорений  (рис. 15):
(рис. 15):





 ,
,  .
.
 ,
,  .
.
 (4.3.3)
(4.3.3) .
.


