
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Расчет траекторий и летных характеристикСтр 1 из 12Следующая ⇒
МИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ САМАРСКИЙ ГОСУДАРСТВЕННЫЙ АЭРОКОСМИЧЕСКИЙ УНИВЕРСИТЕТ ИМЕНИ АКАДЕМИКА С.П.КОРОЛЕВА В.Л. Балакин, Ю.Н. Лазарев ДИНАМИКА ПОЛЕТА САМОЛЕТА РАСЧЕТ ТРАЕКТОРИЙ И ЛЕТНЫХ ХАРАКТЕРИСТИК Конспект лекций САМАРА 2001
УДК 629.7.015(0.75.8)
Динамика полета самолета. Расчет траекторий и летных характеристик: Конспект лекций / В. Л. Балакин, Ю.Н. Лазарев. Самар. гос. аэрокосм. ун-т; Самара, 2001. 56 с. ISBN
Излагается первая часть курса лекций по динамике полета самолета для студентов вечернего отделения специальности 130100 «Самолетостроение». Конспект лекций может быть использован при курсовом и дипломном проектировании. Приводятся необходимые сведения для расчета траекторий движения и методы расчета основных летных характеристик самолета: диапазона высот и скоростей, скороподъемности, теоретического и практического потолков, дальности и продолжительности полета, взлетной и посадочной дистанций. Конспект лекций подготовлен на кафедре динамики полета и систем управления. Ил. 41. Библиогр.: 3 назв.
Печатается по решению редакционно-издательского совета Самарского государственного аэрокосмического университета имени академика С. П. Королева
Рецензенты: д-р техн.наук, проф., акад. РАН В.П. Шорин канд.техн.наук, проф. В.Г. Шахов
ISBN © В.Л. Балакин, Ю.Н. Лазарев © Самарский государственный аэрокосмический университет, 2001 ВВЕДЕНИЕ
Динамика полета самолета, или аэромеханика, является научной дисциплиной, которая рассматривает вопросы, связанные с исследованием траекторий движения самолета, его устойчивости и управляемости. Курс динамики полета самолета относится к числу дисциплин, образующих теоретические основы авиационной техники. Этот курс опирается на основные положения теоретической механики, аэродинамики, теории двигателей, теории автоматического управления и других дисциплин. Ввиду большой сложности задача исследования движения самолета обычно решается в два этапа. На первом этапе самолет рассматривается как управляемая материальная точка с массой, равной массе самолета, которая совершает движение под действием сил, приложенных ко всему самолету. Это позволяет рассчитывать траектории и изучать различные режимы полета самолета (горизонтальный полет, набор высоты, снижение, взлет, посадку, маневры и т.п.). На этом этапе определяются летно-технические характеристики самолета: диапазоны высот и скоростей, в которых возможен безопасный полет самолета с учетом ограничения допустимых режимов полета; дальность и продолжительность полета; маневренные характеристики; взлетно-посадочные характеристики.
На втором этапе самолет рассматривается как материальное тело, движущееся под действием моментов сил, приложенных к самолету. На этом этапе определяются моменты, действующие на самолет; характеристики его устойчивости и управляемости; исследуются вопросы обеспечения устойчивости и управляемости самолета. Конспект лекций посвящен вопросам определения летно-технических характеристик дозвукового самолета. Рассмотрены основные системы координат и их взаимная ориентация, получены уравнения движения центра масс самолета в проекциях на оси траекторной системы координат, приведены исходные данные для расчета траекторий, рассмотрены установившиеся режимы полета, взлет, посадка и основные маневры самолета. Изложенный материал позволяет рассчитать траектории полета в зависимости от аэродинамических характеристик и проектных параметров самолета, а также является необходимым при изучении вопросов его устойчивости и управляемости. УРАВНЕНИЯ ДВИЖЕНИЯ САМОЛЕТА
Применение общих теорем механики Системы координат, ИСХОДНЫЕ ДАННЫЕ ДЛЯ РАСЧЕТА ТРАЕКТОРИЙ САМОЛЕТА В качестве исходных данных для расчета траекторий самолета рассмотрим последовательно его аэродинамические характеристики и характеристики применяемых двигателей.
Упрощенный метод тяг
Рассмотрим установившийся (
При
Одним из методов расчета летных характеристик самолета с ТРД в установившемся движении является метод тяг Н.Е. Жуковского. Идея метода заключается в сопоставлении потребного значения тяги двигателя для осуществления выбранного режима полета с располагаемым значением тяги, которое обеспечивает установленная на самолете силовая установка. Тяга, необходимая для прямолинейного установившегося полета под некоторым углом наклона к горизонту В большинстве случаев пользуются упрощенным методом тяг, принимая следующие предположения: потребная тяга подсчитывается для прямолинейного установившегося горизонтального полета ( угол (
При установившемся горизонтальном полете самолета сила тяги уравновешивает силу лобового сопротивления, а силу тяжести уравновешивает аэродинамическая подъемная сила. Потребная тяга, необходимая для совершения установившегося горизонтального полета с заданной скоростью, определяется из соотношений (3.3):
Совмещенный график зависимостей потребной тяги В общем случае
поэтому при расчетах удобно задаваться числом Маха. Определяем коэффициент аэродинамической подъемной силы
где По семейству поляр находим коэффициент лобового сопротивления
Потребные тяги рассчитываются для различных высот и скоростей полета и нескольких значений полетной массы самолета от минимальной до максимальной. Располагаемые тяги определяются так же в функции скорости для тех же высот, что и потребные тяги. Затем строится диаграмма потребных и располагаемых тяг. Минимальная
На рис. 3.2 и 3.3 показаны две характерные точки на докритической поляре и на кривой потребной тяги, соответствующие минимальной (точка 1) и наивыгоднейшей (точка 2) скоростям полета. Отметим, что при наивыгоднейшей скорости полета потребная тяга имеет минимальное значение Расчет скороподъемности
При наборе высоты, т. е. при полете с положительным углом наклона траектории
Используя первое из уравнений движения (1.11) и учитывая, что
Умножим правую и левую части на скорость
и окончательно
где звездочкой обозначено значение вертикальной скорости при установившемся наборе высоты, т. е. при При расчетах по упрощенному методу тяг предполагается, что сила лобового сопротивления уравновешена потребной тягой:
Обычно делается допущение, что на пологих траекториях ( Тогда можно записать
где  - избыток тяги (с учетом того, что - избыток тяги (с учетом того, что  ). Очевидно, что вертикальная скорость ). Очевидно, что вертикальная скорость  имеет наибольшее значение при максимальной располагаемой тяге двигателя имеет наибольшее значение при максимальной располагаемой тяге двигателя  и зависит от скорости полета и зависит от скорости полета  . Вертикальные скорости рассчитываются для ряда значений высот в летном диапазоне скоростей (рис. 3.9). По этим графикам для каждой высоты определяются максимальное значение вертикальной скорости . Вертикальные скорости рассчитываются для ряда значений высот в летном диапазоне скоростей (рис. 3.9). По этим графикам для каждой высоты определяются максимальное значение вертикальной скорости  и соответствующая ей скорость и соответствующая ей скорость  при наборе высоты. при наборе высоты.
Имея зависимость Определим время подъема самолета (скороподъемность)на различные высоты. Для этого используем введенное ранее кинематическое уравнение для высоты
Интегрируя уравнение (3.19) от начальной
Поскольку при установившемся наборе высоты
где
Поскольку Планирование самолета
Рассмотрим установившееся прямолинейное снижение самолета с работающим двигателем (рис. 3.12). Из (1.11) при
Из них почленным делением можно получить
Поскольку при снижении Определим вертикальную скорость снижения:
Поскольку, как и при наборе высоты,
где Рассмотрим теперь планирование, т. е. снижение самолета с нулевой тягой. Соотношения (3.22) и (3.23) можно переписать в виде
Отсюда следует, что чем больше аэродинамическое качество при планировании, тем более пологой будет траектория самолета. Наиболее пологая траектория будет при
где индекс min надо относить к модулю угла Для крутого планирования при экстренном снижении нужно получить большие вертикальные скорости. Уменьшение аэродинамического качества достигается использованием воздушных щитков и тормозов, увеличивающих коэффициент силы лобового сопротивления.
Метод мощностей
Для самолетов с ТВД определение летных характеристик проводится по методу мощностей, аналогичному упрощенному методу тяг и основанному на сравнении потребных и располагаемых мощностей. Потребная мощность
Располагаемая мощность
где Типичная диаграмма потребных и располагаемых мощностей приведена на рис 3.13. Кривая АВСD соответствует установившемуся горизонтальному полету. Точка А соответствует минимальной скорости Экономическая скорость Область, лежащая выше кривой АВСD, в каждой точке которой реализуемая мощность
Область, лежащая ниже кривой АВСD, в каждой точке которой реализуемая мощность  меньше потребной мощности меньше потребной мощности  , является областью установившегося снижения. , является областью установившегося снижения.
Участку ВСD соответствуют устойчивые (первые) режимы движения, а участку АВ – неустойчивые (вторые) режимы движения.
На рис. 3.14 приведен типичный диапазон высот и скоростей установившегося горизонтального полета самолета с ТВД. На режимы полета самолета с ТВД накладываются те же эксплуатационные ограничения, что и рассмотренные в 3.3. Установим связь между вертикальной скоростью и мощностью. Ранее было получено (3.18):
Имея в виду, что
где
Время подъема самолета с ТВД определяется по соотношению (3.21), а барограмма подъема соответствует рис. 3.11. Общие соотношения Режимы крейсерского полета
Крейсерский режим полета осуществляется при установившемся горизонтальном (или близком к горизонтальному) полете. Для гражданских самолетов различают следующие режимы крейсерского полета: экономические, максимальной крейсерской скорости, максимальной дальности и максимальной продолжительности. Режим максимальной крейсерской скорости соответствует номинальному режиму работы двигателей (без дросселирования). Режим максимальной дальности соответствует минимуму километрового расхода Основными эксплуатационными режимами гражданского самолета являются экономические, при которых обеспечивается наименьшая себестоимость эксплуатации. Эти режимы лежат в основе составления расписания движения самолетов, норм расхода топлива и рейсового времени. Экономическая скорость На практике при полетах на большую дальность с целью уменьшения расхода топлива, а также для обеспечения требований службы управления воздушным движением (УВД) по сокращению плотности воздушного движения на отдельных участках трассы применяется ступенчатый профиль смены эшелонов. Он состоит из двух, трех и более участков горизонтального полета. Полет «по потолкам» на высотах, соответствующих минимальному расходу топлива, используется в особых случаях (например, при отказе части двигателей), когда по согласованию со службой УВД получено разрешение на полет без выдерживания заданных эшелонов.
С винтовыми двигателями
Для самолета с ТВД определим часовой расход топлива
и километровый расход
если скорость задается в метрах в секунду. В выражениях (4.15) и (4.16) величина При расчете дальности
Подставив в выражения (4.3) и (4.4) значения
Можно приближенно считать, что максимальная дальность полета Можно приближенно считать, что максимальное время полета
Расчет дальности полета Взлет самолета с разбегом
При малых скоростях движения крыло не может создать подъемную силу, достаточную для поддержания самолета в воздухе, и поэтому на начальном этапе взлета необходимо использовать опорную реакцию грунта, взлетно-посадочной полосы (ВПП) или водной поверхности. Таким образом, взлет должен состоять из двух участков: наземного (разбега по поверхности) и воздушного (разгона в воздухе с набором высоты). Под взлетом подразумевается движение самолета с разгоном от точки старта до набора безопасной скорости и высоты. Безопасной высотой по международным нормам считается высота 10,7 м. Безопасной скоростью является скорость, на которой самолет обладает устойчивостью и управляемостью и может перейти к следующему этапу – начальному набору высоты. Полный взлет с разбегом состоит из разбега до скорости отрыва Рассмотрим прямолинейный разбег самолета с трехопорным шасси по твердой горизонтальной поверхности при отсутствии ветра. Схема сил, действующих на самолет при разбеге показана на рис.5.2. Кроме рассмотренных ранее сил
Поскольку разбег происходит горизонтально и
Силы
где Считая, что
или с учетом (5.3)
На большей части разбега угол
и, кроме того,
Уравнение (5.1) с учетом (5.7) преобразуем к виду:
Поскольку
то окончательно получим
При заданном режиме работы двигателя выражение в квадратных скобках является функцией скорости и угла атаки, т.к.
Интегрируя это уравнение, получим формулу для определения времени разбега:
Теперь получим формулу для определения длины разбега:
По эксплуатационным соображениям (ухудшение обзора при большом угле атаки, трудность выдерживания направления при поднятой передней стойке) стояночный угол атаки сохраняется до скорости подъема переднего колеса, равной (0,7...0,95) При приближенных расчетах предполагается, что при разбеге на самолет действует некоторая средняя тангенциальная перегрузка
Тогда приближенно дистанцию разбега можно оценить по формуле
Самолет отрывается от поверхности при достижении некоторой скорости Тогда из условия равновесия сил
и окончательно
К основным способам уменьшения длины разбега относятся: увеличение тяговооруженности (взлетные и форсажные режимы работы двигателя, установка ускорителей) и уменьшение скорости отрыва (применение механизации крыла - выдвижных и многощелевых закрылков, предкрылков и т. п.). После отрыва самолет переводится в режим неустановившегося набора высоты. Ввиду малой протяженности этого участка точный расчет траектории необязателен. Поэтому подсчитаем длину Полная энергия самолета в момент отрыва полностью определяется его кинетической энергией
а в конце набора высоты представляет сумму потенциальной и кинетической энергий
где
Взлетная дистанция равна сумме длин разбега и набора высоты с разгоном:
Например, для самолета ТУ-154 взлетная дистанция составляет 2200...2500 м.
Посадка самолета с пробегом
Посадка с пробегом является маневром, завершающим полет. В процессе посадки рассеивается энергия самолета, уменьшаются скорость и высота полета. Посадочная дистанция состоит из двух участков: воздушного и наземного (рис. 5.3). Началом посадочной дистанции считается точка, расположенная на высоте
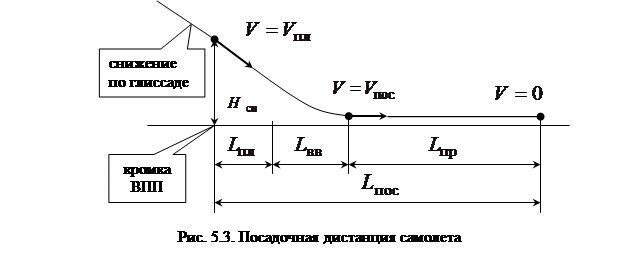 Поскольку угол наклона траектории при снижении невелик (по нормам автоматизированной посадки он равен - Поскольку угол наклона траектории при снижении невелик (по нормам автоматизированной посадки он равен -  ), то для его выдерживания приходится снижаться с работающим двигателем. На высоте 8...12 м над ВПП путем увеличения ), то для его выдерживания приходится снижаться с работающим двигателем. На высоте 8...12 м над ВПП путем увеличения  создается перегрузка создается перегрузка  . Траектория искривляется таким образом, чтобы стать горизонтальной на высоте около 1 м от нижней кромки колес шасси до поверхности полосы. Этот участок называется выравниванием. . Траектория искривляется таким образом, чтобы стать горизонтальной на высоте около 1 м от нижней кромки колес шасси до поверхности полосы. Этот участок называется выравниванием.
Далее на горизонтальном участке выдерживания скорость уменьшается. Для сохранения постоянной перегрузки Следует отметить, что для современных скоростных самолетов все эти этапы проводятся слитно, как единый маневр (может отсутствовать выдерживание). Наземный участок посадки (пробег) начинается с движения на главных колесах. Из-за п
|
|||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-05-27; просмотров: 1008; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.17.154.171 (0.125 с.) |
 ) прямолинейный (
) прямолинейный ( ) полет самолета без крена и скольжения. Ранее были получены уравнения, описывающие полет самолета в вертикальной плоскости (1.11):
) полет самолета без крена и скольжения. Ранее были получены уравнения, описывающие полет самолета в вертикальной плоскости (1.11): (3.1)
(3.1) имеем уравнения равновесия сил
имеем уравнения равновесия сил (3.2)
(3.2) , называется потребной тягой
, называется потребной тягой  .
. );
); ) считается малым, а проекция силы тяги существенно меньше аэродинамической подъемной силы:
) считается малым, а проекция силы тяги существенно меньше аэродинамической подъемной силы:  .
.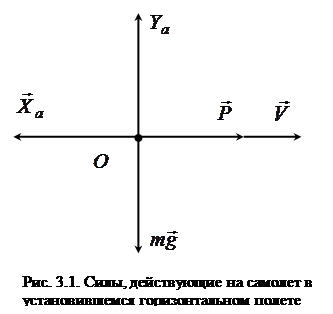 Учитывая, что
Учитывая, что  , а
, а  , из равенства (3.2) следуют два основополагающих соотношения (рис. 3.1)
, из равенства (3.2) следуют два основополагающих соотношения (рис. 3.1) ,
,  . (3.3)
. (3.3) . (3.4)
. (3.4) и располагаемой тяги
и располагаемой тяги  ) полета при заданных значениях массы самолета
) полета при заданных значениях массы самолета  , высоты полета
, высоты полета  и режима работы двигателей называется диаграммой потребных и располагаемых тяг. Рассмотрим последовательность расчетов при определении потребной тяги.
и режима работы двигателей называется диаграммой потребных и располагаемых тяг. Рассмотрим последовательность расчетов при определении потребной тяги. , (3.5)
, (3.5) , (3.6)
, (3.6) ,
,  - скорость звука. (3.7)
- скорость звука. (3.7) , затем рассчитываем аэродинамическое качество
, затем рассчитываем аэродинамическое качество  и потребную тягу
и потребную тягу  :
: . (3.8)
. (3.8) и наивыгоднейшая
и наивыгоднейшая  скорости установившегося горизонтального полета на небольших и средних высотах определяются из условия равенства подъемной силы и силы тяжести, т.е. из второго равенства (3.3):
скорости установившегося горизонтального полета на небольших и средних высотах определяются из условия равенства подъемной силы и силы тяжести, т.е. из второго равенства (3.3): , (3.9)
, (3.9)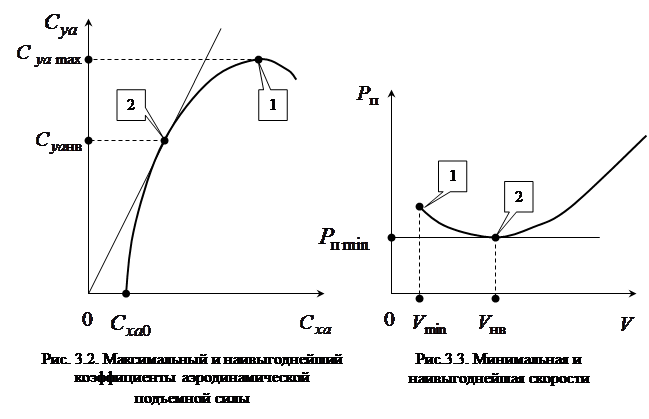
 . (3.10)
. (3.10) (рис. 3.3).
(рис. 3.3). , вертикальная составляющая скорости определяется по формуле (рис.3.8):
, вертикальная составляющая скорости определяется по формуле (рис.3.8): . (3.14)
. (3.14) , выразим
, выразим  :
:
 . (3.15)
. (3.15)
 , (3.16)
, (3.16) .
. . (3.17)
. (3.17) ) величина силы лобового сопротивления приблизительно равна величине силы лобового сопротивления в горизонтальном полете с той же скоростью и, следовательно, величине потребной тяги.
) величина силы лобового сопротивления приблизительно равна величине силы лобового сопротивления в горизонтальном полете с той же скоростью и, следовательно, величине потребной тяги. , (3.18)
, (3.18)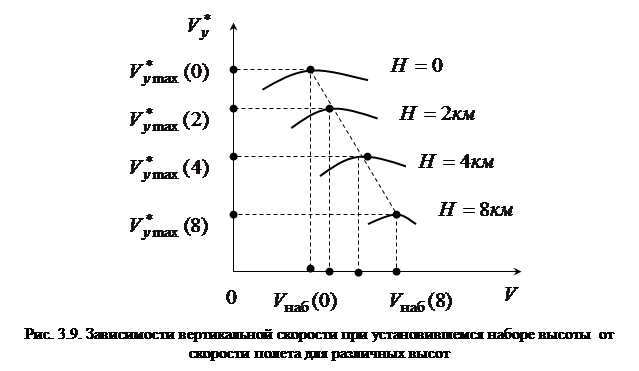
 , можно определить максимальную высоту – теоретический потолок
, можно определить максимальную высоту – теоретический потолок  , на которой еще возможен установившийся горизонтальный полет (при
, на которой еще возможен установившийся горизонтальный полет (при  ) (рис. 3.10). Помимо теоретического потолка определяют и практический потолок
) (рис. 3.10). Помимо теоретического потолка определяют и практический потолок  , под которым понимают высоту установившегося горизонтального полета, на которой максимальная вертикальная скорость равна некоторой заданной величине
, под которым понимают высоту установившегося горизонтального полета, на которой максимальная вертикальная скорость равна некоторой заданной величине 
 .
. . (3.19)
. (3.19) до текущей
до текущей  высоты полета, получим
высоты полета, получим . (3.20)
. (3.20) , то
, то , (3.21)
, (3.21) - время набора высоты
- время набора высоты 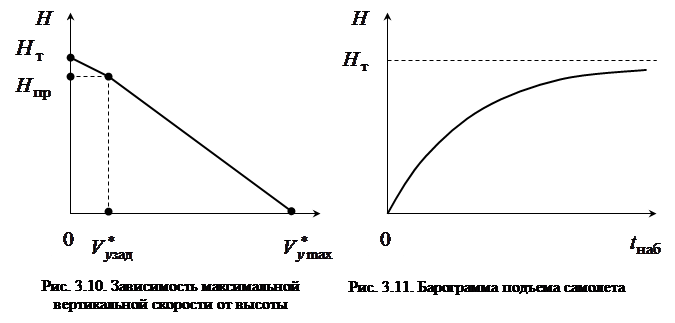
 называют барограммой подъема самолета (рис. 3.11).
называют барограммой подъема самолета (рис. 3.11). при приближении к теоретическому потолку стремится к нулю, то время установившегося набора высоты на теоретический потолок получается бесконечно большим. В качестве примера отметим, что для самолета Ту-154 время набора высоты 11км составляет 21 минуту.
при приближении к теоретическому потолку стремится к нулю, то время установившегося набора высоты на теоретический потолок получается бесконечно большим. В качестве примера отметим, что для самолета Ту-154 время набора высоты 11км составляет 21 минуту.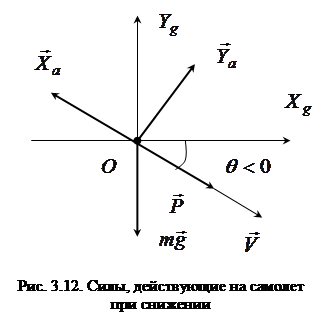 Снижение самолета с заданной высоты полета на другую может быть обусловлено различными обстоятельствами. К ним относятся снижение самолета с крейсерской высоты до высоты полета по кругу перед совершением посадки, экстренное снижение самолета с крейсерской высоты до безопасной высоты полета в случае разгерметизации кабины и т. д.
Снижение самолета с заданной высоты полета на другую может быть обусловлено различными обстоятельствами. К ним относятся снижение самолета с крейсерской высоты до высоты полета по кругу перед совершением посадки, экстренное снижение самолета с крейсерской высоты до безопасной высоты полета в случае разгерметизации кабины и т. д. и
и  имеем соотношения:
имеем соотношения: (3.22)
(3.22) . (3.23)
. (3.23) , то
, то  ,
,  и
и  .
. (3.24)
(3.24) , то
, то , (3.25)
, (3.25) - недостаток тяги.
- недостаток тяги.
 (3.26)
(3.26) :
: (3.27)
(3.27) . (3.28)
. (3.28) равна
равна , (3.29)
, (3.29) - число двигателей,
- число двигателей,  - максимальная эквивалентная мощность,
- максимальная эквивалентная мощность,  - расчетный коэффициент полезного действия винта.
- расчетный коэффициент полезного действия винта. ) она может определяться по соотношению (3.10).
) она может определяться по соотношению (3.10). соответствует минимальной потребной мощности
соответствует минимальной потребной мощности  (точка В). Максимальная скорость
(точка В). Максимальная скорость  соответствует точке D пересечения кривых потребной и располагаемой мощностей.
соответствует точке D пересечения кривых потребной и располагаемой мощностей.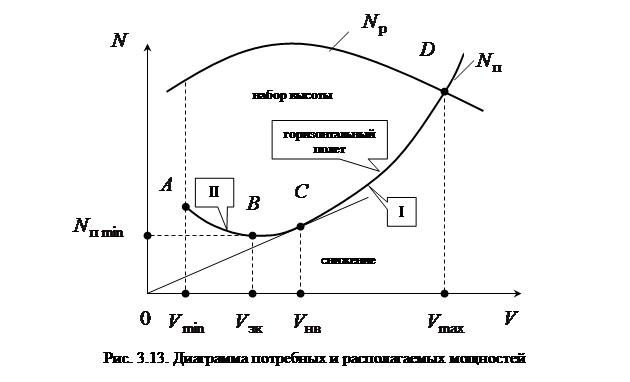
 . (3.30)
. (3.30) , а
, а  , запишем
, запишем , (3.31)
, (3.31) - избыток мощности.
- избыток мощности.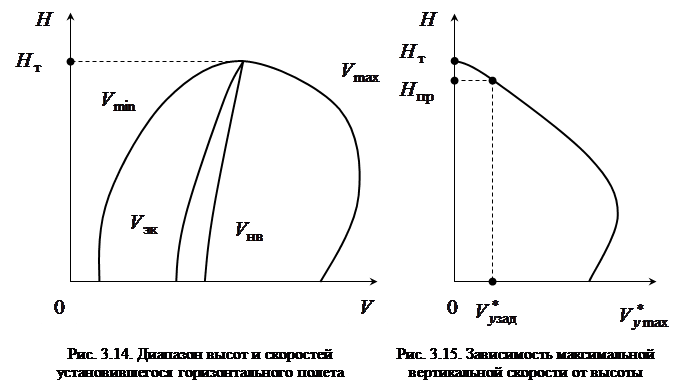
 соответствует максимальный избыток мощности
соответствует максимальный избыток мощности 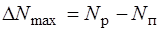 . На рис. 3.15 приведена типичная зависимость максимальной вертикальной скорости
. На рис. 3.15 приведена типичная зависимость максимальной вертикальной скорости  . Режим максимальной продолжительности соответствует минимуму часового расхода
. Режим максимальной продолжительности соответствует минимуму часового расхода  . Минимальное время полета на заданную дальность, очевидно, соответствует максимальной скорости.
. Минимальное время полета на заданную дальность, очевидно, соответствует максимальной скорости. . Например, для самолета ТУ-154 при
. Например, для самолета ТУ-154 при  т и при
т и при  -
-  , а
, а  .
. (кг/ч):
(кг/ч): (4.15)
(4.15) (кг/км):
(кг/км): , (4.16)
, (4.16) (кг/Вт ч) характеризует удельный расход топлива, т.е. расход массы топлива в час на единицу мощности.
(кг/Вт ч) характеризует удельный расход топлива, т.е. расход массы топлива в час на единицу мощности. и времени
и времени  полета самолета с винтовыми двигателями надо учитывать коэффициент полезного действия винта
полета самолета с винтовыми двигателями надо учитывать коэффициент полезного действия винта  . В установившемся горизонтальном полете выполняется условие
. В установившемся горизонтальном полете выполняется условие  или
или  . Отсюда следует, что мощность
. Отсюда следует, что мощность  равна (Вт):
равна (Вт): . (4.17)
. (4.17) , (4.18)
, (4.18) . (4.19)
. (4.19) достигается при полете на высоте, близкой к практическому потолку
достигается при полете на высоте, близкой к практическому потолку  . Здесь
. Здесь  - условная крейсерская скорость, обеспечивающая максимальную дальность полета при условии, что удельный расход топлива
- условная крейсерская скорость, обеспечивающая максимальную дальность полета при условии, что удельный расход топлива  достигается на высоте, близкой к практическому потолку
достигается на высоте, близкой к практическому потолку  , удовлетворяющей условию
, удовлетворяющей условию  .
.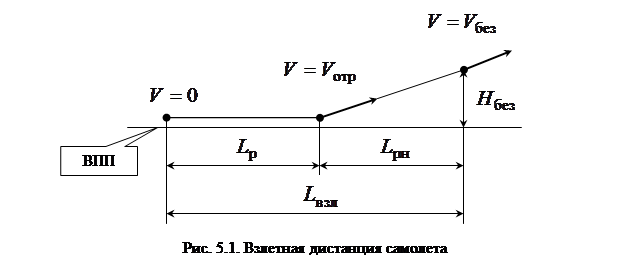
 , отрыва и разгона до безопасной скорости
, отрыва и разгона до безопасной скорости  с одновременным набором безопасной высоты
с одновременным набором безопасной высоты  , начального набора высоты с переходом к полетной конфигурации и разгоном до скорости набора высоты по маршруту. Взлетная дистанция самолета, включающая дистанции первых двух этапов взлета: разбега и разгона до безопасной скорости, показана на рис.5.1.
, начального набора высоты с переходом к полетной конфигурации и разгоном до скорости набора высоты по маршруту. Взлетная дистанция самолета, включающая дистанции первых двух этапов взлета: разбега и разгона до безопасной скорости, показана на рис.5.1. ,
,  ,
,  и
и  при разбеге на самолет действуют силы нормальных реакций
при разбеге на самолет действуют силы нормальных реакций  и
и  и
и  . Эти силы приложены соответственно к главным (основным) опорам и передней опоре в точках касания колес поверхности.
. Эти силы приложены соответственно к главным (основным) опорам и передней опоре в точках касания колес поверхности.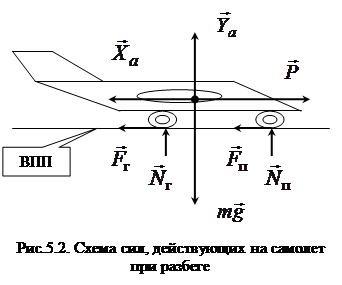 Спроектировав силы на оси траекторной системы координат, запишем уравнения движения:
Спроектировав силы на оси траекторной системы координат, запишем уравнения движения: , (5.1)
, (5.1) . (5.2)
. (5.2) , из уравнения (5.2) можно определить сумму нормальных реакций:
, из уравнения (5.2) можно определить сумму нормальных реакций: . (5.3)
. (5.3) и
и  ,
,  , (5.4)
, (5.4) и
и  - коэффициенты трения.
- коэффициенты трения. , запишем
, запишем (5.5)
(5.5) . (5.6)
. (5.6) мал, и поэтому
мал, и поэтому ,
, 
 . Учитывая это, получим
. Учитывая это, получим (5.7)
(5.7) (5.8)
(5.8) .
. (5.9)
(5.9) (5.10)
(5.10) , а
, а  . Это есть не что иное, как тангенциальная перегрузка
. Это есть не что иное, как тангенциальная перегрузка  , и поэтому уравнение для скорости можно записать в виде
, и поэтому уравнение для скорости можно записать в виде . (5.11)
. (5.11) . (5.12)
. (5.12) ,
,  ,
,  . (5.13)
. (5.13) . При такой технике пилотирования при взлете за счет небольшого увеличения длины разбега улучшается удобство пилотирования и повышается безопасность при взлете.
. При такой технике пилотирования при взлете за счет небольшого увеличения длины разбега улучшается удобство пилотирования и повышается безопасность при взлете. . (5.14)
. (5.14) . (5.15)
. (5.15) и
и  .
.
 . (5.16)
. (5.16) разгона с набором высоты с помощью энергетического метода. Для этого сравним приращение полной энергии самолета с работой внешних сил.
разгона с набором высоты с помощью энергетического метода. Для этого сравним приращение полной энергии самолета с работой внешних сил. , (5.17)
, (5.17) , (5.18)
, (5.18) - высота набора безопасной скорости,
- высота набора безопасной скорости,  (по статистике). Работа внешних сил, действующих в направлении движения,
(по статистике). Работа внешних сил, действующих в направлении движения,  , где
, где  - избыток тяги, а интеграл вычисляется по длине
- избыток тяги, а интеграл вычисляется по длине  траектории набора высоты. Примем, что
траектории набора высоты. Примем, что  , а угол наклона траектории невелик:
, а угол наклона траектории невелик:  . Тогда
. Тогда  так как
так как  . Приравнивая изменение энергии
. Приравнивая изменение энергии  произведенной работе
произведенной работе  , получаем:
, получаем: (5.19)
(5.19) . (5.20)
. (5.20) над входной кромкой взлетно-посадочной полосы (ВПП). После пролета над этой точкой начинается первый этап посадки - планирование, который является продолжением предыдущего снижения по глиссаде.
над входной кромкой взлетно-посадочной полосы (ВПП). После пролета над этой точкой начинается первый этап посадки - планирование, который является продолжением предыдущего снижения по глиссаде.
 угол атаки постепенно увеличивается. Когда угол атаки станет равен посадочному
угол атаки постепенно увеличивается. Когда угол атаки станет равен посадочному  , его увеличение прекращается. При правильной посадке выдерживание происходит с уменьшением расстояния до ВПП, и самолет плавно касается поверхности колесами основных стоек шасси. Скорость самолета в этот момент называется посадочной
, его увеличение прекращается. При правильной посадке выдерживание происходит с уменьшением расстояния до ВПП, и самолет плавно касается поверхности колесами основных стоек шасси. Скорость самолета в этот момент называется посадочной  .
.


