
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Выбор закона управления и расчет настроечных параметров регулятора по заданным параметрам качества управления ⇐ ПредыдущаяСтр 2 из 2
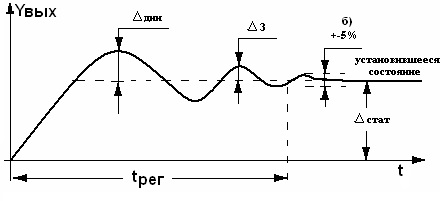
Тип регулятора и закон управления (регулирования) выбирают в зависимости от технологических показателей, свойств ОУ, а также требований к качеству процесса регулирования. Одна из основных характеристик качества процесса регулирования — точность, оцениваемая значением статической ошибки, т е остаточным отклонением регулируемой величины от заданного значения по окончании переходного процесса. В статической системе в установившемся состоянии - через достаточно долгое время после начала регулирования τ, всегда имеется статическая ошибка регулирования. Динамическая ошибка - это максимальное в процессе регулирования отклонение регулируемого параметра от конечного состояния равновесия Δдин= (Yвых маx - Yвых ном). Время регулирования - это отрезок времени Δτ с момента нанесения на замкнутую САУ возмущающего воздействия, по истечении которого отличие регулируемого параметра от конечного состояния равновесия становится равным и меньше ± 5% от заданной величины. Если заданная величина равна нулю, то ± 5% берут от величины динамической ошибки. Перерегулирование - это динамическая ошибка, отнесённая к номинальной величине регулируемого параметра в процентах. Перерегулирование вычисляют по формуле: σ = (Yвых маx - Yвых ном)100%/Yвых ном .
Рисунок 5 – График регулирования статической САУ Регуляторы в подавляющем большинстве работают по принципу отрицательной обратной связи с целью компенсировать внешние возмущения, действующие на объект управления и отработать заданный извне или заложенный в системе закон управления. Основные законы автоматического регулирования: 1. Пропорциональный закон 2. Интегральный закон 3. Пропорционально-интегральный закон 4. Пропорционально-интегрально-дифференциальныйзакон Заданные показатели качества регулирования: σ ≤ 10% εст≤0,1 При выборе закона регулирования регулятора непрерывного действия часто указывают величину отношения постоянной времени объекта T к временизапаздыванияτ.
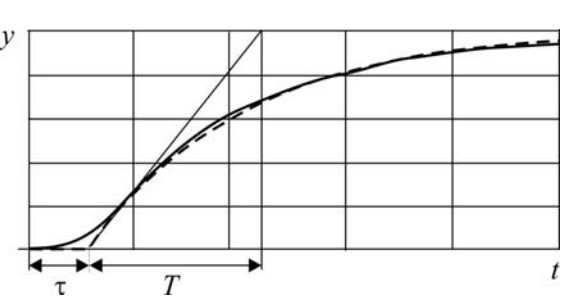
Рисунок 6 – Объяснение T и τ на примере апериодического переходного процесса Если Если 10 > Если 7,5> Если
Из графика реакции объекта на единичное ступенчатое воздействие(рисунок 2) видно, что запаздывание
Рисунок 6-График переходной функции системы при K п=1000
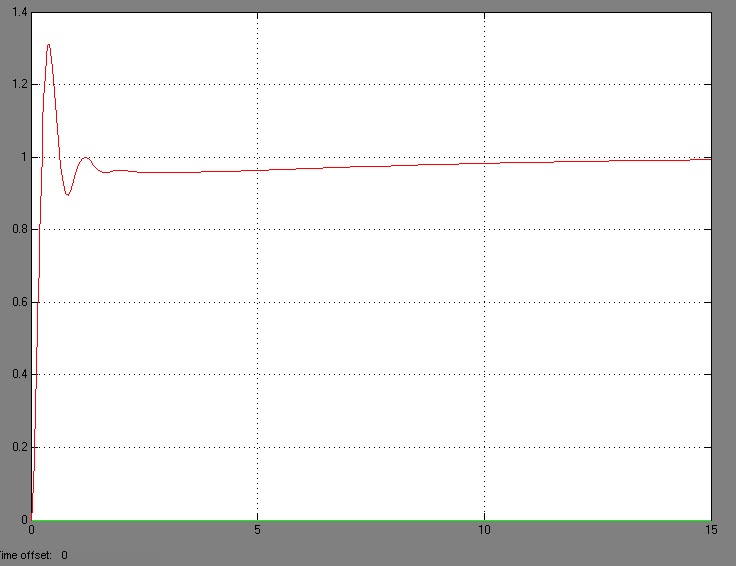
С увеличение Kп система теряет устойчивость. Применим ПИ-регулятор. Подбирая коэффициенты, получим наиболее близкий к заданным показателям качества регулирования график.
Рисунок 5-Структурная схема системы автоматического регулирования
Рисунок 7-График переходной функции K П =10 и K И =15 Рассматривая последний график видно, что мы не попадаем в заданные показатели качества регулирования.
tp = 0.75 c ≤ 1,8 ЗАКЛЮЧЕНИЕ В данной курсовой работе были изучены и усвоены следующие знания по дисциплине ТАУ: 1. Способы аналитического и схематического представления систем автоматического представления 2. Действия и преобразование схем систем автоматического управления 3. Передаточные функции действия над ними 4. Частотные и алгебраические критерии устойчивости систем автоматического управления При исследовании объекта было установлено, что объект возможно регулировать, но не возможно достичь заданных параметров качества.
|
|||||
|
|
Последнее изменение этой страницы: 2021-04-20; просмотров: 105; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.217.182.45 (0.005 с.) |

 >1 – П-регулятор
>1 – П-регулятор =0 =>
=0 => 

 ≥ 10%
≥ 10% = 1-0,98=0,02 ≥ 0,1
= 1-0,98=0,02 ≥ 0,1


