Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Опорная поверхность для глобальной системы координат ⇐ ПредыдущаяСтр 2 из 2
Глобальные координаты определяются путем поворота и смещения локальных координат на каждой поверхности. Преобразование координат может быть записано следующим образом:
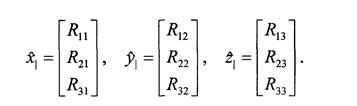
где подстрочный индекс "д" используется для обозначения глобальных координат, индекс "О" - для обозначения сдвига координатных систем и индекс "|" - для обозначения локальных координат. Матрица поворота R и вектор сдвига могут быть вычислены для любой поверхности, используя любую другую поверхность в качестве опорной для глобальной системы координат. Матрица поворота позволяет понять ориентацию координатной системы поверхности по отношению к глобальной опорной поверхности. На локальной поверхности единичный вектор, ориентированный вдоль оси х, есть просто (1, 0, 0). Этот вектор можно повернуть, используя матрицу R, для ориентации оси х в глобальной системе координат. Умножение матрицы на каждый из трех единичных векторов дает: 7-10 Chapter 7: SYSTEM MENU
Заметьте, что единичные вектора, ориентированные вдоль осей локальной координатной системы, это просто столбцы в матрице R. Приводимые в списке "Prescription Data" величины "Global vertex coordinates" (координаты вершин поверхностей в глобальной системе координат), а также величины компонент матрицы поворота R и вектора сдвига - все относятся к глобальной опорной поверхности. Если поверхность является поверхностью типа "coordinate break", то в R-матрицу включаются эффекты сдвига и поворота координат. Если поверхность типа "coordinate break" выбрана в качестве опорной глобальной поверхности, то опорная координатная система определяется после децентрировки и поворота локальной координатной системы. Если матрица R вычисляется для поверхности типа "coordinate break" и эта поверхность предшествует опорной поверхности, то R матрица относится к системе, предшествующей трансформации координат. Если у Вас возникает на этот счет сомнение, просто введите пустую поверхность, не являющуюся поверхностью "coordinate break", в интересующее Вас место для проверки глобальной ориентации. По умолчанию опорной поверхностью является поверхность №1, но любая другая поверхность может быть выбрана в качестве опорной (кроме поверхности объекта, если она удалена на бесконечно большое расстояние!).
Опорная поверхность используется также для определения точки совмещения zoom -позиций на трехмерных схемах. Fields Поля ________________________________________ Диалоговое окно "Fields" позволяет определить направления в поле зрения (точки поля или просто "поля"). Поля могут быть заданы углами, высотами объекта (для систем с конечным удалением) или высотами изображения. Электронные клавиши могут быть использованы для активизации и деактивизации позиций поля, а также для сортировки данных в порядке возрастания. Смотри главу "Conventions and Definitions", в которой описаны принятые соглашения относительно полей. Vignetting factors Коэффициенты виньетирования ZEMAX предоставляет также возможность ввода коэффициентов виньетирования для каждого поля. Четыре коэффициента виньетирования имеют обозначения VDX, VDY, VCX и VCY. Величины этих коэффициентов должны быть равны нулю, если в системе нет виньетирования. Коэффициенты виньетирования описаны в главе "Conventions and Definitions" в разделе "Vignetting Factors". В диалоговом окне имеется также электронная клавиша под названием "Set Vig". Если нажать эту клавишу, то коэффициенты виньетирования для каждого поля будут вычислены заново на основе данных текущей схемы. Алгоритм вычисления факторов Глава 7: МЕНЮ "SYSTEM" 7 -11 виньетирования рассчитывает "виньетирующие" коэффициенты децентрировки и сжатия зрачка таким образом, что четыре краевых луча, идущих через верхний, нижний, левый и правый края зрачка, пропускаются в пределах всех определенных пользователем полудиаметров каждой поверхности; используется только главная длина волны. Команда "CIr Vig" служит для обнуления коэффициентов виньетирования. Алгоритм стартует с запуска "сетки" лучей через зрачок. На каждой поверхности, для которой самим пользователем были установлены величины полудиаметров, производится проверка: проходит луч через эту апертуру или нет. Все лучи, прошедшие через все поверхности, затем используются для вычисления центроида невиньетирующего зрачка. Заметьте, что используются только установленные пользователем (а не вычисленные автоматически) величины полудиаметров, а поверхностные апертуры (такие как круглые и прямоугольные) игнорируются. Точный контур невиньетирующего зрачка затем вычисляется итеративным методом с точностью около 0.001%.
Алгоритм может не работать в некоторых случаях. Для таких систем факторы виньетирования должны подбираться и устанавливаться вручную. Точность алгоритма расчета факторов виньетирования можно проверить путем трассирования нескольких краевых лучей.
|
||||||
|
|
Последнее изменение этой страницы: 2021-04-13; просмотров: 75; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.118.137.243 (0.005 с.) |