Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Автоматизированные системы управленияСтр 1 из 9Следующая ⇒
МИНИСТЕРСТВО ОБРАЗОВАНИЯ КРАСНОЯРСКОГО КРАЯ Краевое государственное бюджетное профессиональное образовательное учреждение «Дивногорский гидроэнергетический техникум имени А.Е. Бочкина»
МЕТОДИЧЕСКОЕ ПОСОБИЕ Автоматизированные системы управления В электроэнергетических системах Для студентов дневного и заочного отделений специальности 13.02.03 “Электрические станции, сети и системы”
по ПМ03. “Контроль и управление технологическими процессами ” МДК.03.01. Автоматизированные системы управления в электроэнергетических системах. Часть 2 Применение АСУТП на гидроэлектростанциях Г.
Рабочая программа профессионального модуля ПМ-03. “Контроль и управление технологическими процессами” разработана на основе Федерального государственного образовательного стандарта по специальностям среднего профессионального образования 13.02.03 «Электрические станции, сети и системы»
Организация-разработчик: Краевое государственное бюджетное профессиональное образовательное учреждение «Дивногорский гидроэнергетический техникум имени А.Е.Бочкина»
Разработчик: Докин В.В. преподаватель ДГЭТ.
Содержание
Введение Содержание данного методического пособия включает в себя материал из разных учебников по АСУТП в электроэнергетических системах, список которых прилагается в конце данного пособия. Издание данного пособия было вызвано тем, что по данной рабочей программе нет конкретного учебника, а существующие учебники предназначены для студентов высших учебных заведений и содержание их мало понятно для учащихся колледжа энергетического направления. Автор данного пособия, используя свой многолетний практический опыт работы по данному направлению на Красноярской ГЭС, а также опыт преподавания в колледже энергетического направления, систематизировал и упростил материал до понимания его учащимися энергетического колледжа. В пособии рассмотрены, применяемые на электростанциях автоматические системы управления объектами электростанций и принцип их работы. Данное методическое пособие разработано: - в соответствии с ФГОС по специальности 13.02.03 «Электрические станции, сети и системы»(базовой подготовки) и рабочей программой профессионального модуля«МДК.03.01. Автоматизированные системы управления в электроэнергетических системах» по ПМ03 “ Контроль и управление технологическими процессами”. Данное пособие является частью основной профессиональной образовательной программы. Рабочая программа профессионального модуля может быть использована в дополнительном профессиональном образовании:
- по программам профессиональной подготовки по профессиям рабочих: 19842 «Электромонтер по обслуживанию подстанций»; 19848 «Электромонтер по обслуживанию электрооборудования электростанций»; 19861«Электромонтер по ремонту и обслуживанию электрооборудования». Цели и задачи данного методического пособия: Обучения указанным видом профессиональной деятельности и соответствующими профессиональными компетенциями.
Видеостена на ЦПУ Саяно-Шушенской ГЭС.
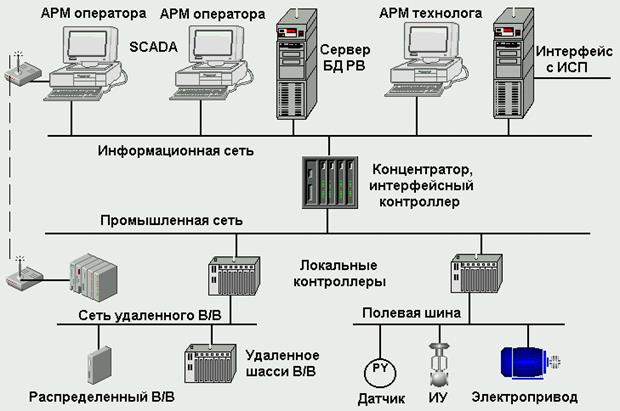
ЦПУ на Чебоксарской ГЭС. Раздел 12. Применение АСУТП в энергетике. На верхнем уровне 3 АСУТП применяются персональные компьютеры, выполненные в виде АРМ-ов операторов. АРМ - автоматизированные рабочие места дежурного персонала на электростанции. АРМ-ы состоят из промышленных компьютеров и программного обеспечения для данного вида работы. В компьютерах верхнего уровня в качестве программного обеспечения, решающего технологические задачи, часто используются системы типа SCADA. На среднем уровне 2 применяются программируемые логические контроллеры (ПЛК) задачей которых является сбор технологической информации от датчиков управляемого объекта и воздействие на него через исполнительные механизмы. На нижнем уровне 1 находятся УСО - устройства связи с объектом, они осуществляют обмен информацией верхнего и нижнего уровней АСУТП с датчиками и исполнительными механизмами. УСО принимают от датчиков аналоговую и дискретную информацию о состоянии объектов, переводят её в цифровой код для передачи в устройства среднего и верхнего уровней. УСО также принимают управляющую информацию цифровым кодом от устройств верхнего и нижнего уровня и передают её на исполнение в виде аналогового или дискретного сигнала. Уровень 0 содержит датчики и исполнительные механизмы. 12.2.2. АРМ-ы и СЕРВЕР-ы (рис.2).
Рис.2. АРМ-ы, СЕРВЕР-ы и сети АСУТП.
АРМ-ы снабжают дежурный персонал технологической информацией и позволяют выдать управляющие воздействия на объекты ГЭС. Сервер БД РВ (базы данных реального времени) осуществляет формирование технологической базы данных и её архивирование, связь с АРМ-ами. Интерфейсный сервер обеспечивают обмен информацией между технологическими устройствами промышленной сети нижнего уровня и информационной сетью верхнего уровня персональных компьютеров. Сети АСУТП служат для связи компьютеров верхнего уровня с компьютерами нижнего уровня. В качестве информационной сети используется Ethernet. Интерфейсы. Интерфейсы периферийного оборудования выполняют функции сопряжения процессоров, контроллеров, запоминающих устройств с аппаратурой передачи данных (рис.3). Самые распространённые интерфейсы RS232, RS 485 с протоколами Modbus. RS232 это COM-порт, с тремя основными линиями: Tx (transmit, передача), Rx (recieve, получение) и GND (ground, земля). RS485 это асинхронный полудуплексный последовательный интерфейс по 2 проводам (совмещённыеTx/Rx+ и Tx/Rx-) с разностью потенциалов на каждой паре от 2 до 10 вольт.
Рис.3. Интерфейсы.
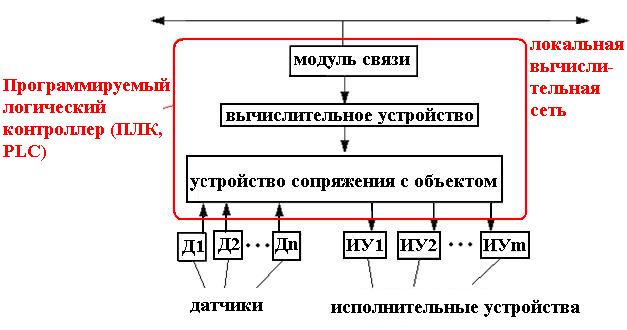
12.3.4. Структура и основные функции УВМ (рис.4). Конструктивно УВМ (управляющая вычислительная машина) выполняется в виде пульта управления (ПУ) и процессорного (системного) блока (ПБ). Структурная схема ЦУВМ аналогична ПК (персональному компьютеру), за исключением, в ЦУВМ (центральная УВМ) присутствуют блоки МВИ (модули ввода технологической информации) и МВУ (модули вывода информации управления технологическим объектом).
ПУ – пульт управления; УВВ - устройства ввода-вывода информации; ВЗУ – внешнее запоминающее устройство; ПБ – процессорный блок; ОЗУ – оперативное запоминающее устройство; ПЗУ – постоянное запоминающее устройство; АЛУ - арифметико-логическое устройство; УУ – устройство управления процессом работы УВМ; МВУ - модуль вывода управляющего воздействия на объект; МВИ – модуль ввода технологической информации от объекта; ЦУВМ – центральная управляющая машина. ПУ является основой рабочего места оператора, осуществляющего контроль работы АСУТП. Через ПУ поступает исходная информация в виде управляющих программ, считываемых от ВЗУ. С помощью клавиатуры оператор может составлять и корректировать управляющие программы и контролировать ход управляемого технологического процесса. Дисплей представляет оператору визуальную информацию о ходе ТП – технологического процесса. С помощью принтера производится распечатка отчетно-справочной информации о выполнении производственных заданий. Обмен информацией в ЦУВМ (с клавиатурой, дисплеем, принтером, ВЗУ и т.п.) осуществляется через УВВ. Ввод-вывод информации производится с использованием параллельного и последовательного интерфейсов (портов). Машинные интерфейсы предназначены для организации связей между составными элементами ЭВМ. Причем, для связи внутри ПБ обычно используется параллельный интерфейс, так как он многократно увеличивает скорость передачи информации. Через последовательный интерфейс реализуется связь с отдаленными корреспондентами, его достоинство – не нужен многожильный кабель. Информация, поступающая в процессорный блок ПБ с пульта управления или непосредственно от ЦУВМ и МВИ, запоминается в ОЗУ. Управляющие воздействия на объект осуществляются с помощью модуля МВУ. В ПЗУ содержатся модули загрузки программ УВМ. В ОЗУ хранятся технологические программы, находящиеся в работе, и текущая информация о ходе реализуемого технологического процесса, состоянии технологического оборудования.
Основным устройством, осуществляющим переработку поступающей информации в УВМ и выдачу управляющих сигналов, является центральный процессор (ЦП), состоящий из АЛУ и УУ устройств. АЛУ осуществляет арифметическую и логическую обработку информации, а УУ определяет, какие арифметико-логические операции и в каком порядке должно реализовать АЛУ в соответствии с заданной программой. Промышленные компьютеры существенно отличаются от офисных по конструктивным признакам, однако используют те же микропроцессоры и архитектуру. Основными отличиями являются следующие: • разъемы для сменных плат устанавливаются на пассивной объединительной панели, а не на материнской плате; • для сменных плат используются надежные штырьковые разъемы; • для смены плат не нужно раскрывать корпус; • используются специализированные промышленные компьютерные шины CompactPCI, AdvancedTCA, COMExpress, VME, VXI и др.; • вместо жесткого диска может быть использована флэш-память; • наличие сторожевого таймера; • применение вентиляторов со сменным пылеулавливающим фильтром или отсутствие вентиляторов; • прочная несущая конструкция с надежным креплением плат пружинящими планками с винтовыми зажимами; • применение блоков питания повышенной надежности, с защитой от к.з. по выходу и с расширенным диапазоном сетевых напряжений (от 100 до 250 В); резервирование блоков питания; • наличие энергонезависимой оперативной памяти (с аккумуляторным питанием), которая сохраняет данные при сбоях или исчезновении питания; • в одном конструктиве и на одной объединительной шине может располагаться несколько компьютерных систем; • наличие съемной флэш-памяти; • применение, кроме Windows, операционных систем DOS, Linux и операционных систем реального времени. Конструктивное исполнение промышленного компьютера обеспечивает защиту от пыли, влаги, вибрации, электромагнитных наводок и облегчает техническое обслуживание. Для работы в диапазоне температур от -40 до +70 ºС используется индустриальная элементная база с расширенным температурным диапазоном или, если это возможно, искусственный подогрев и принудительное охлаждение. Монтаж промышленного компьютера может быть выполнен в стандартной 19-дюймовой стойке, на панели, на столе, на стене, на DIN-рейке и в специализированном конструктиве. Органы управления промышленным компьютером (кнопка сброса, питания и клавиатура) могут закрываться дверцей с ключом.
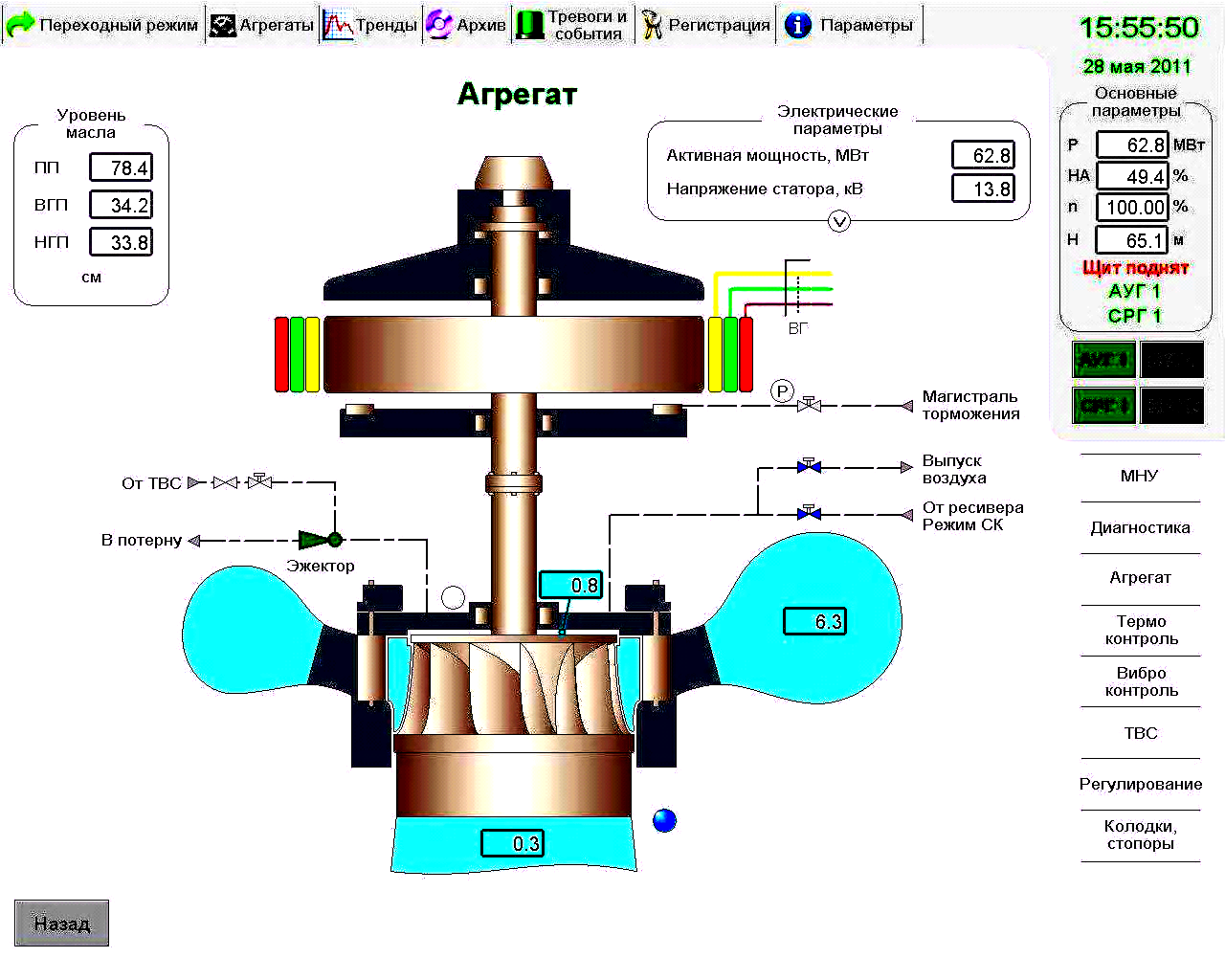
Пример применения S CADA-системы.
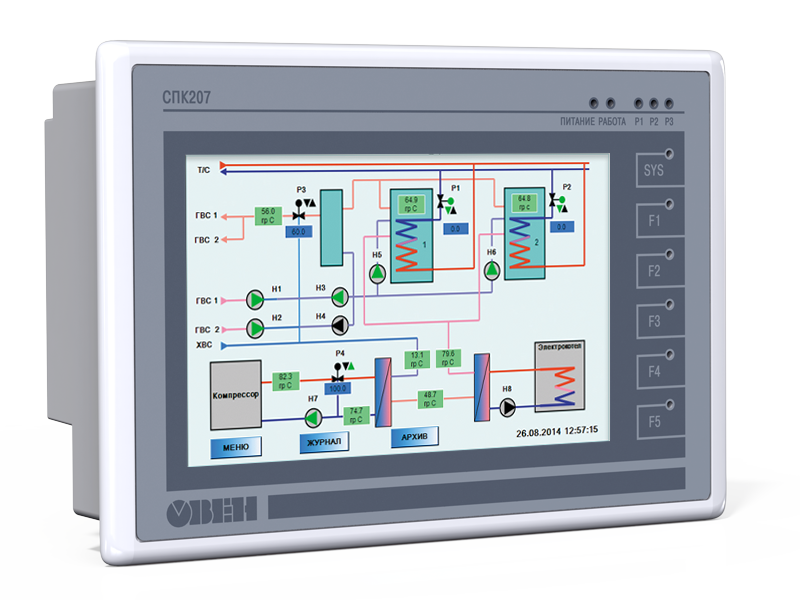
Рис. 5. Изображение действующего гидроагрегата на экране компьютера начальника смены станции. Кроме опроса датчиков контроллеры выполняют функции автоматического управления технологическими объектами ТО. Управление объектом осуществляется выдачей управляющих сигналов на исполнительные устройства (ИУ1 – ИУ m).
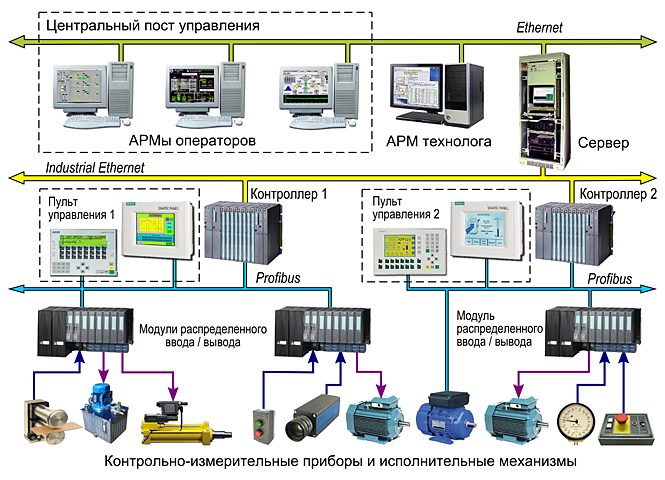
Рис.6. Связи контроллера с верхним уровнем АСУТП и объектом.
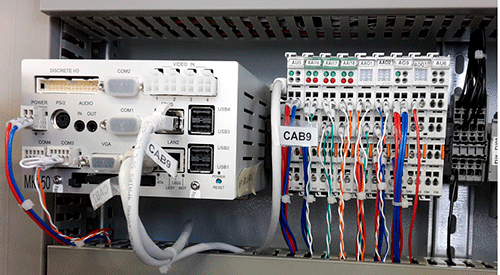
Монитор контроллера.
Вид на контроллер сзади. Структура ПЛК. Программируемые контроллеры (PLC — ProgrammableLogicalController) — это выпускаемые серийно управляющие устройства, предназначенные для управления технологическим циклом работы производственного оборудования. Типичная структура ПЛК представлена на рис.7. Конструктивно ПЛК обычно оформлен в виде двух или трех блоков. Обязательными являются модуль питания, микропроцессорный модуль МПМ и блок программатора.
Программатор — это программирующее устройство, с помощью которого управляющая программа вводится в блок ПЛК. Одновременно предусматривается применение переносного клавишного программатора, который используют преимущественно для наладки системы управления, построенной на базе ПЛК. После ввода и отладки УП контроллер реализует заданные управляющие функции, работая в автономном автоматическом режиме. МПМ - микропроцессорное устройство, осуществляет переработку поступающей информации и формирует управляющие сигналы. В нем же находится устройство памяти ПЛК в составе ПЗУ и ОЗУ. В ПЛК нет многозадачной операционной системы типа Windows. Все технологические программы, заложенные в ПЛК, выполняются в цикле. МВВ - модули ввода-вывода служат для ввода информации, поступающей от объекта ТО, и вывода сигналов управления на объект. Различают следующие основные типы МВВ: - ПДТС - приёмники дискретных телесигналов, служат для ввода дискретной информации от ТО. ПДТС характеризует состояние сигналов от объекта типа включено-отключено. - ПРТУ – передатчики дискретных телесигналов, служат для вывода дискретных управляющих сигналов на ТО. ПРТУ выдают при помощи реле управляющие сигналы включить-отключить. - АЦП - аналого-цифровые преобразователи, служат для ввода аналоговых параметров. На входе ток или напряжение, на выходе цифровой код. - ЦАП - цифроаналоговые преобразователи, служат для вывода управляющих аналоговых сигналов. На входе цифровой код, на выходе аналоговый сигнал. Часто управляющие сигналы от модуля ЦАП выдаются на ТО через магнитные усилители. При необходимости в блоке ПЛК устанавливаются различные специализированные МВВ, среди которых — модули для приема импульсных сигналов датчиков перемещений и модули, предназначенные для управления следящими электроприводами. ПЛК обычно устанавливаются непосредственно на объекте или вблизи от него, например, на гидроагрегате. ПЛК считывает с датчиков гидроагрегата информацию, используя блоки АЦП и ПДТС, и направляют её в ЦУВМ. ЦУВМ может выдать на ПЛК решение. ПЛК выдаёт на ТО управляющие сигналы, используя блоки ЦАП и ПРТУ. В локальных АСУТП, с ограниченным числом функций, ПЛК может самостоятельно принимать решение. Например, регулирование скорости вращения гидротурбины. 12.3.2. Модули ввода-вывода (рис.8).
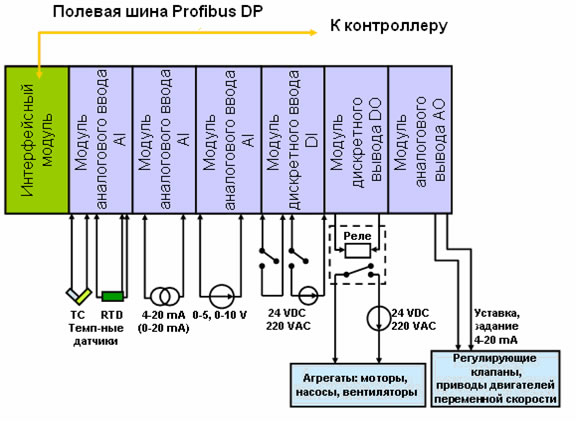
Нижний уровень АСУТП составляют измерительные приборы и исполнительные механизмы. Приборы могут быть аналоговыми или цифровыми (интеллектуальными). Для обмена информацией с приборами необходимо использовать аналого-цифровые преобразователи (АЦП).
Рис. 8. Модули ввода-вывода ПЛК. Блок питания (БП) сделан отдельным модулем, а не устройством, чтобы гарантировать совместимость с данной линейкой ПЛК. Чаще всего входное напряжение у БП 220 В переменного тока, выходное — 24 В постоянного тока. Дискретные (ПДТС) и аналоговые (АЦП) модули обрабатывают соответствующие сигналы от датчиков. Дискретные сигналы, приходящие от датчиков, могут информировать, например, о состоянии насоса включен/выключен. Управляющие дискретные сигналы могут запускать насос, если U=24 В, либо останавливать этот насос, если U=0 В.
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы: • нано-ПЛК (менее 16 каналов); • микро-ПЛК (более 16, до 100 каналов); • средние (более 100, до 500 каналов); • большие (более 500 каналов).
По расположению модулей ввода-вывода ПЛК бывают: • моноблочными - в которых устройство ввода-вывода (МВВ) не может быть удалено из контроллера. • модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Типовое количество слотов для сменных модулей - от 8 до 32; • распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода (МВВ) выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля. По конструктивному исполнению и способу крепления контроллеры делятся на: • панельные (для монтажа на панель или дверцу шкафа); • для монтажа на DIN-рейку внутри шкафа; • для крепления на стене; • стоечные - для монтажа в стойке; • бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "OriginalEquipmentManufacturer"). По области применения контроллеры делятся на следующие типы: • универсальные общепромышленные; • для управления роботами; • для управления позиционированием и перемещением; • коммуникационные; • ПИД-контроллеры; • специализированные. По способу программирования контроллеры бывают: • программируемые с лицевой панели контроллера; • программируемые переносным программатором; • программируемые с помощью персонального компьютера. Типовая архитектура ПЛК.
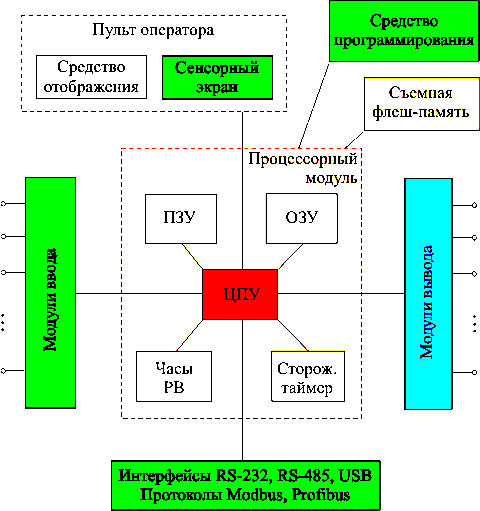
Рис.9. Типовая архитектура ПЛК. Архитектурой контроллера называют набор его основных компонентов и связей между ними. Типовой состав ПЛК включает центральный процессор, память, сетевые интерфейсы и устройства ввода-вывода. Процессорный модуль включает в себя микропроцессор (центральное процессорное устройство - ЦПУ), запоминающие устройства, часы реального времени и сторожевой таймер. Основными характеристиками микропроцессора являются разрядность (в ПЛК используются 8-ми, 16-ти и 32-разрядные микропроцессоры), тактовая частота, архитектура, наличие операций с плавающей точкой, типы поддерживаемых портов ввода-вывода, температурный диапазон работоспособности и потребляемая мощность. Основными типами памяти является постоянное запоминающее устройство (ПЗУ), оперативное запоминающее устройство (ОЗУ) и набор регистров. Регистры являются самыми быстродействующими элементами памяти, поскольку они используются арифметико-логическим устройством (АЛУ) для исполнения элементарных команд процессора. ПЗУ используют для хранения редко изменяемой информации, такой, как операционная система, драйверы устройств, загрузчик, исполняемый модуль программы пользователя. В качестве ПЗУ обычно используется электрически стираемая перепрограммируемая память. ОЗУ используется для хранения данных, которые многократно изменяются в процессе работы контроллера, например, результаты промежуточных вычислений, диагностическая информация, массивы, выводимые на графики, данные для отображения на дисплее. Программирование контроллеров малой мощности выполняется с помощью кнопок, расположенных на лицевой панели или с помощью переносного пульта для программирования. В качестве пульта в последнее время используется компьютер формата "ноутбук". Сторожевой таймер представляет собой счетчик, который считает импульсы тактового генератора и в нормальном режиме периодически сбрасывается (перезапускается) работающим процессором. Если процессор "зависает", то сигналы сброса не поступают в счетчик, он продолжает считать и при достижении некоторого порога вырабатывает сигнал "Сброс" для перезапуска "зависшего" процессора. Часы реального времени (РВ) представляют собой кварцевые часы, которые питаются от батарейки и поэтому продолжают идти при выключенном ПЛК. Процессорный модуль Процессорный модуль ПЛК выполняет следующие задачи: • собирает данные из модулей ввода в память и отсылает данные из памяти в модули вывода; • выполняет обмен данными с устройством для программирования контроллера; • выдает метки часов реального времени; • осуществляет обмен данными с промышленной сетью; • выполняет начальную загрузку и исполнение операционной системы; • исполняет загрузочный модуль пользовательской программы системы автоматизации; • управляет актами обмена с памятью.
К основным характеристикам процессорного модуля относятся: • тип операционной системы (Windows CE, Linux, DOS, OS-9, QNX и др.); • язык программирования для стандартной системы МЭК 61131-3; • типы поддерживаемых интерфейсов (RS-232, RS-422, RS-485, USB, Ethernet и др.); • типы поддерживаемых сетей (Modbus, Ethernet, Profibus, и др.); • возможность подключения устройств индикации или интерфейса оператора (светодиодного или ЖКИ индикатора, клавиатуры, мыши, дисплея с интерфейсами VGA, DVI или CMOS, LVDS, трекбола и др.); • разрядность (8, 16, 32 или 64 бита); • тактовая частота микропроцессора и памяти; • время выполнения команд; • типы памяти (ОЗУ, кэш, ПЗУ - флэш, съемная флэш и др.); • типы встроенных функций (ПИД-регулятор, счетчики, ШИМ, алгоритмы позиционирования и управления движением и др.); • брендпроизводитель (Intel, AMD, Atmel, Motorola, RealLab! и др.). Быстродействие процессорного модуля ПЛК обычно оценивают по времени выполнения логических команд, поскольку они наиболее распространены при реализации алгоритмов управления. Источник питания Стандартными напряжениями питания ПЛК являются напряжения 12 В, 24 и 48 В. Источником электрической энергии обычно является промышленная сеть 220В, 50 Гц. Низкое напряжение питания позволяет питать контроллеры от аккумуляторов. В ПЛК иногда используют батарею для питания часов реального времени (которые должны функционировать при выключенном ПЛК) и для сохранения информации в ПЗУ на время аварийных перерывов питания.
Контроллер в системах автоматизации выполняет циклический алгоритм, включающий ввод данных и размещение их в ОЗУ, обработку данных и вывод. Длительность контроллерного цикла (его еще называют рабочим циклом) зависит от количества модулей ввода-вывода и наличия в них замаскированных (исключенных из процедуры обмена) входов-выходов, поэтому рассчитывается для каждой конфигурации автоматизированной системы отдельно. Написание программы для ПК.
Рабочее место программиста-технолога состоит из персонального компьютера, контроллера с модулями ввода-вывода, Самые используемые контроллеры, безоговорочно, у Siemens и AllenBradley (последним, к слову, принадлежит RockwellAutomation со своей линейкой SCADA-пакетов RSView). За ними по пятам идут Schneider Electric; ОВЕН; General Electric; AutomationDirect; ICP DAS; Advantech; Mitsubishi Electric; B&R. Пример применения контроллера для управления Объектом.
В блок МПМ введена управляющая программа с помощью программатора. Задание на управление объектом ТО цифровым кодом приходит от УВМ. В программе происходит сравнение заданных оборотов гидротурбины N зад с фактическими N факт. Если N зад> N факт, то проходит команда на ЦАП “прибавить обороты”, Если N зад< N факт, то проходит команда на ЦАП “убавить обороты”, если N зад= N факт, то, согласно алгоритму происходит опрос датчика оборотов через АЦП. АЦП вводит эту информацию в ПЛК и далее цикл повторяется. ЦАП действует через исполнительный механизм ИМ на направляющий аппарат гидротурбины.
Пример отладки алгоритма. В контроллер заложены программа регулирования напряжения на шинах генератора. При изменении графика напряжения или напряжения на шинах ГЭС программа АСУТП воздействует на ключи АРВ «прибавить», «убавить».
Вариант 1. Изменилось заданное по графику напряжение Uзад. Дано: Uзад = 113кВ, Uф = 110 кВ, шаг выполнения программы U=1кВ. Нарисовать алгоритм и схему регулятора напряжения на шинах гидрогенератора на базе ПЛК.
Решение: 1. Ввод U зад=113кВ. o Цикл 1. 1. Метка М. Проверка условия U зад> U ф, 113кВ>110кВ? Да. 2. Выполнить команду на АРВ «прибавить» через МВВ типа ЦАП, U ф:= U ф+1=110+1=111кВ. Перейти к метке М2. 3. Метка М2. Выполнить команду «ввод U ф» через МВВ типа АЦП и перейти к метке М.
o Цикл 2. 1. Метка М. Проверка условия U зад> U ф, 113кВ>111кВ? Да. 2. Выполнить команду на АРВ «прибавить» через МВВ типа ЦАП, U ф:= U ф+1=111+1=112кВ. Перейти к метке М2. 3. Метка М2. Выполнить команду «ввод U ф» через МВВ типа АЦП и перейти к метке М.
o Цикл 3. 1. Метка М. Проверка условия U зад> U ф, 113кВ>112кВ? Да. 2. Выполнить команду на АРВ «прибавить» через МВВ типа ЦАП, U ф:= U ф+1=112+1=113кВ. Перейти к метке М2. 3. Метка М2. Выполнить команду «ввод U ф» через МВВ типа АЦП и перейти к метке М.
o Цикл 4. 1. Метка М. Проверка условия U зад> U ф, 113кВ>113кВ? Нет. Перейти к метке М1. 2. Метка М1. U зад< U ф, 113кВ<113кВ? нет. Перейти к метке М2. 3. Метка М2. Выполнить команду «ввод U ф» через МВВ типа АЦП и перейти к метке М.
o Цикл 5. 1. Метка М. Проверка условия U зад> U ф, 113кВ>113кВ? нет. Перейти к метке М1. 2. Метка М1. U зад< U ф, 113кВ<113кВ? нет. Перейти к метке М2. 3. Метка М2. Выполнить команду «ввод U ф» через МВВ типа АЦП и перейти к метке М.
Далее цикл повторяется, так как U зад= U ф, 113кВ=113кВ до тех пор пока не изменится U ф или U зад.
Контрольные вопросы по теме ПЛК. 1. Назначение контроллеров 2. Состав ПЛК. 3. Для чего нужен программатор? 4. Какие модули ввода-вывода применяются в ПЛК? 5. Назначение и характеристики модуля АЦП. 6. Назначение и характеристики модуля ЦАП. 7. Типы ПЛК. 8. Состав и назначение процессорного модуля. 9. Для чего в ПЛК нужен сторожевой таймер? 10. Перечислите языки программирования ПЛК.
Тема 12.4. Автоматизированная система коммерческого учета электроэнергии (АСКУЭ).
12.4.1. Задачи АСКУЭ. Задача АСКУЭ состоит в точном измерении количества потребленной или переданной энергии с учетом заданных параметров и тарифов, а также в автоматическом приведении технологических данных в удобную для анализа форму. АСКУЭ должна обеспечивать дистанционный сбор, хранение и обработку информации об энергетических потоках в электросетях. Система АСКУЭ представляет собой совокупность контрольно-измерительной аппаратуры, сетей передачи данных, компьютеров (серверов) и программного обеспечения. Схематическая структура системы АСКУЭ включает 4 уровня: · на нижнем уровне первичные измерительные приборы учёта счётчики электроэнергии с цифровыми выходами измеряют количество электроэнергии в точках учета;
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-04-05; просмотров: 240; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.16.25.220 (0.215 с.) |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||