
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
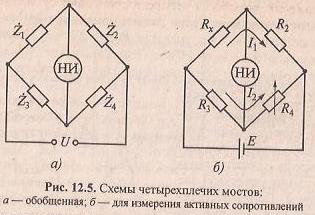
Мостовые методы измерения параметров компонентов цепей. Четырехплечие измерительные мосты для измерения R , L , C .
Идея-уравновешивание мостовой схемы с неизвестным комплексным сопротивлением путем подбора образцовых сопротивлений. Сравнение измеряемой величины (R,L,C) с образцовой мерой может осуществляться вручную или автоматически, на постоянном или переменном токе. Существует несколько разновидностей мостовых схем измерения параметров R,L,C на переменном токе: четырехплечие, шестиплечие (двойные), уравновешенные, неуравновешенные и процентные. Управление этими мостами может быть как ручным, так и автоматическим. Наиболее распространены схемы четырехплечих уравновешенных мостов.
К одной из диагоналей моста подведено синусоидальное напряжение от генератора. Нуль-индикатор (НИ) регистрирует напряжение, возникающее в другой диагонали моста. Искомое полное сопротивление вводят в одно из плеч моста. Затем мост уравновешивают, изменяя сопротивление остальных плеч. Состояние баланса фиксируют по нулевому показателю индикатора. Такой мост называется уравновешенным (сбалансированным). Сопротивления четырехплечевого моста в общем случае носят комплексный характер:Z̊1=Z1ejφ1 и т.д., где Z1,Z2,Z3,Z4 – модули комплексных сопротивлений, а φ1-4 – их соответствующие фазы. Обычно неизвестным (измеряемым) элементом является Z3. Условия равновесия четырехплечного моста определяются равенствами: Z1*Z4=Z2*Z3 и φ1+φ4=φ2+φ3 Для уравновешивания моста необходимо изменять как модуль, так и фазу по крайней мере одного из комплексных сопротивлений, плеч моста, то есть иметь не менее двух регулируемых элементов. Мост балансируется методом последовательных приближений: поочередно регулируют каждый из элементов до получения минимального показания НИ. Сначала регулируется R (делается очень большой), а потом регулируются С и R, необходимые для уравновешивания (увеличиваем С => увеличивается амплитуда => уменьшаем R и т.д.). Операции повторяются многократно, пока НИ не зафиксирует нуль. Эта процедура называется шагами, а количество шагов определяет сходимость моста (мост с хорошей сходимостью имеет не более пяти шагов). В качестве регулировочных элементов в мостах используются образцовые резисторы и конденсаторы (катушки с переменной индуктивностью очень сложны по конструкции): резисторы – для обеспечения равенства амплитуд, конденсаторы – для равновесия фаз.
L и C можно измерять ТОЛЬКО на переменном токе! Все варианты мостов имеют цель получить наилучшую точность, высокую чувствит к регулировке. При измерении активных сопротивлений используется схема б) с постоянным током: Rx*R4=R2*R3 => Rx=(R3/R4)(длительное)*R2(плавное) В случае активных сопротивлений достаточно менять только один параметр (например R4), a R2, R3 - в определенном диапазоне. Пределы измеряемых сопротивлений для подобных мостов составляют от 10^-2 до 10^7 Ом. Погрешности измерения – от сотых долей процента до нескольких процентов в зависимости от диапазона измерения. Наименьшие погрешности лежат в диапазоне измерений от 100 Ом до 100 кОм. При малых измеряемых сопротивлениях резисторов вклад в погрешность измерения вносят сопротивления отдельных соединительных проводов, при больших - сопротивления утечек. Данная схема (б) может быть цифровой, для этого регулируемый резистор – набор ряда сопротивлений, которые поочередно включаются в плечо измерительного моста при помощи ключа. Каждому положению ключа соответствует определенный код, который поступает на цифровое отсчетное устройство. При переходе к точке нуля меняется полярность тока. Погрешность метода: погрешность установки образцового резистора (элементов, образующих мост), погрешность установки нуля, погрешность переходных сопротивлений контактов. Мосты переменного тока больше подвержены влиянию помех и паразитных связей (между плечами, плечами и землей, мостом и оператором), чем мосты постоянного тока.
Поэтому для измерения индуктивности L используется схема: Rx+jwLx=R2*R3*(1/R0+jwC0) Rx=R2*R3/Ro wLx=R2*R3*wCo => Lx=R2*R3*Co R2*R3 – коэф пропорциональности Q=wLx/Rx=R0*w*C0 – добротность катушки
Рассмотрим схему б: Tgδ=G/B=1/(Rx*w*Cx) R4*Rx*(1+j*w*C0*R0)=R2*R0*(1+j*w*Cx*Rx) Отсюда: Rx=R0*R2/R4 Cx=C0*R4/R2 Tg=1/(Rx*w*Cx)= 1/(R0*w*C0) Достоинства: высокая чувствительность, большая точность, широкий диапазон измеряемых значений параметров элементов, высокая стабильность, можно использовать эталонные элементы. Недостатки: метод узкополосный, образцовые элементы имеют частотную зависимость (при работе на частотах свыше 5 кГц погрешности измерения резко возрастают), на высоких частот возникают перекрестные связи между плечами, у моста нет баланса.
|
||||||
|
|
Последнее изменение этой страницы: 2021-03-09; просмотров: 220; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.116.51.117 (0.007 с.) |
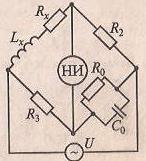 Для измерения индуктивности и добротности катушек используются источники гармонического тока. Эквивалентные схемы замещения для катушек с потерями могут быть последовательными или параллельными, в зависимости от потерь, отраженных активным сопротивлением. Можно использовать схему с изменяемой L, но как было сказано выше, лучше использовать схему с конденсатором.
Для измерения индуктивности и добротности катушек используются источники гармонического тока. Эквивалентные схемы замещения для катушек с потерями могут быть последовательными или параллельными, в зависимости от потерь, отраженных активным сопротивлением. Можно использовать схему с изменяемой L, но как было сказано выше, лучше использовать схему с конденсатором.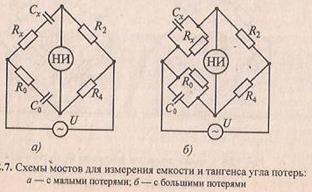 Для измерения емкости и тангенса угла потерь конденсаторов используют схемы:
Для измерения емкости и тангенса угла потерь конденсаторов используют схемы:


