Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Параллельная работа двух гидроцилиндров
Задача 2
Решение 2 Схему для испытания делителя потока изобразить на аудиторной доске с помощью аппликационных моделей.
Обсудить принцип действия предложенной схемы. Полностью открыть дроссель с обратным клапаном 2.1. Включить насосную станцию 0.1 и настроить переливной клапан 0.2 на давление 50 бар. Переключением распределителя 1.1 осуществлять возвратно-поступательное движение гидроцилиндров 1.0 и 2.0, сравнивая показания манометров 1.3 и 2.2 и визуально отслеживая синхронность выдвижения штоков гидроцилиндров. Постепенно прикрывая дроссель 2.1 добиться рассогласования синхронного выдвижения штоков цилиндров. Сравнить показания манометров 1.3 и 2.2 при первых признаках появления рассогласования. Сделать выводы о диапазоне регулирования испытуемого делителя потока. Примечание. Для подтверждения целесообразности применения делителей потока в приводах с синхронным движением выходных звеньев гидроцилиндров в собранной схеме следует заменить делитель потока на тройник и повторить эксперимент. Сравнить качество работы двух схем в части обеспечения синхронного движения штоков гидроцилиндров.
Лабораторная работа № 9 Электрогидравлический привод Устройства ввода электрического сигнала.
Задача 1
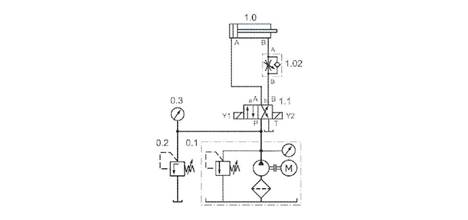
Решение 1 Принципиальную гидравлическую схему силовой части привода и электрическую схему управляющей части привода изобразить на аудиторной доске с помощью аппликационных моделей. Обсудить принцип действия привода, правила изображения релейно-контактных схем.
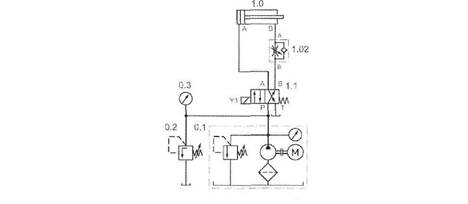
Принцип действия привода. При нажатии оператором на пусковую кнопку S1 (см. электрическую схему) напряжение подается на электромагнит Y1. Электромагнит Y1 переключает 4/2 распределитель 1.1 (см. гидравлическую схему), шток гидроцилиндра 1.0 начинает выдвигаться. В любом положении штока гидроцилиндра 1.0 оператор может отпустить пусковую кнопку, распределитель 1.1 под действием возвратной пружины вернется в исходное состояние, шток цилиндра 1.0 начнет втягиваться. Управление, при котором электрический сигнал управления от устройства ввода подается непосредственно на гидравлический распределитель с электромагнитным управлением, называется прямым управлением*. Собрать электрогидравлический привод на стенде-тренажере. Перед пуском проверить правильность соединения гидравлических и электрических цепей управления.
Следует обратить внимание на отличие индексации клемм контактов кнопочных выключателей на приведенной принципиальной электрической схеме и на выключателях, входящих в состав стенда-тренажера.
Для упрощения проверки правильности монтажа релейно-контактной системы управления гидроприводом, а также для облегчения поиска неисправностей соединение цепей управления, связанных с клеммой «0 V» источника питания следует проводить проводами синего цвета, а с клеммой «24 V» - проводами красного или зеленого цветов. После проверки правильности работы привода выключить насосную станцию, отсоединить клеммы распределителя 1.1 от схемы для снятия основных электрических параметров электромагнита управления гидрораспределителем.
* Условные графические обозначения устройств релейной электроавтоматики, обозначение распределителей с электромагнитным управлением и реле давления в электрических схемах, правила построения релейно-контактных систем управления приведены в разделе «Релейно-контактные системы управления» книги «Пневматические и гидравлические приводы и системы. Ч.1. Пневматические приводы и средства автоматизации», Наземцев А.С., Изд-во Форум, 2004. Определение основных электрических параметров электромагнита управления гидрораспределителем.
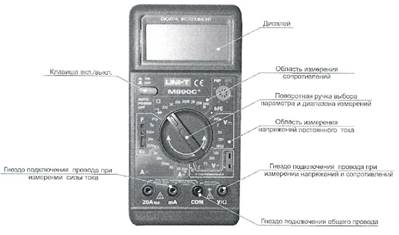
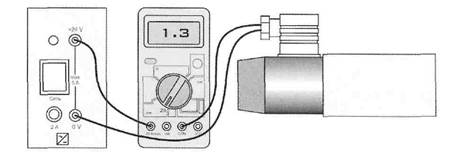
Ознакомить слушателей с назначением, возможностями и органами управления цифрового мультиметра.
1. Измерить напряжение на выходе источника постоянного тока (24 В). Повернуть ручку выбора параметра в область измерения напряжений постоянного тока, на цифру 200.
Полученное значение напряжения зафиксировать (U ≈24 В). 2. Измерить сопротивление катушки электромагнита распределителя. Ручку выбора измеряемого параметра повернуть в область измерения сопротивлений на цифру 200.
Полученное значение сопротивления зафиксировать (R ≈18,8 Ом). 4. Измерить силу тока, потребляемого электромагнитом распределителя. Ручку выбора измеряемого параметра повернуть в область измерения постоянного тока на максимум (на цифру 20 или 10, в зависимости от модификации мультиметра).
Полученное значение сопротивления зафиксировать (I ≈1,3 А). По полученным данным рассчитать мощность катушки электромагнита по формуле: W = I2 или W= UI. Получим значение мощности катушки электромагнита W ≈31 Ватт. Задача 2
Решение 2
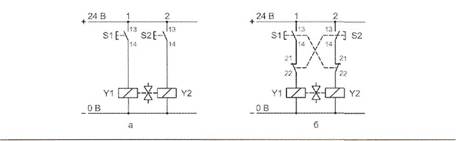
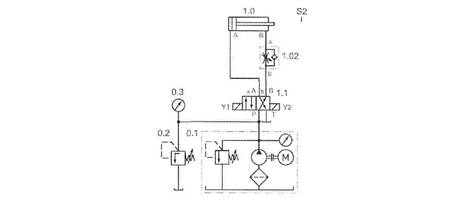
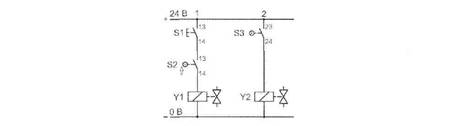
Принцип действия привода. При кратковременном нажатии оператором на пусковую кнопку S1 (см. электрическую схему а) напряжение подается на электромагнит Y1. Электромагнит Y1 переключает 4/2 распределитель 1.1 в позицию а (см. гидравлическую схему), шток гидроцилиндра 1.0 выдвигается. Нажатие на пусковую кнопку S2 (при не нажатой кнопке S1) приводит к переключению распределителя 1.1 в позицию b и втягиванию штока гидроцилиндра 1.0. Для того, чтобы избежать возможности подачи управляющего электрического сигнала одновременно на электромагниты Y1 и Y2, необходимо применить блокировку (см. электрическую схему б). Задача 3
Решение 3 Задание А
Принцип действия привода.
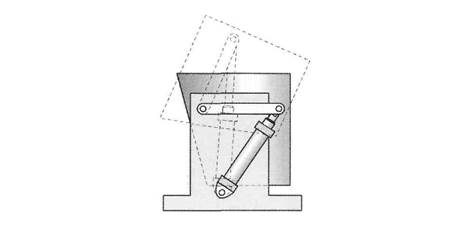
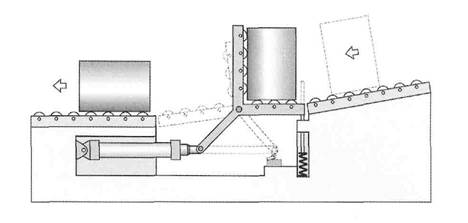
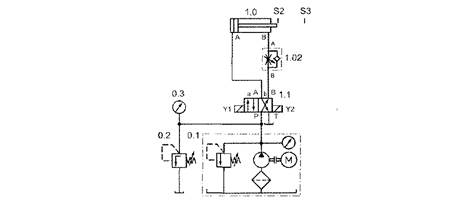
При кратковременном нажатии оператором на пусковую кнопку S1 (см. электрическую схему) напряжение подается на электромагнит Y1. Электромагнит Y1 переключает 4/2 распределитель 1.1 в позицию а (см. гидравлическую схему), шток гидроцилиндра 1.0 выдвигается. При достижении штоком гидроцилиндра электромеханического путевого выключателя S2 управляющий электрический сигнал подается на электромагнит Y2, что при не нажатой кнопке S1 приводит к переключению распределителя 1.1 в позицию b и автоматическому втягиванию штока гидроцилиндра 1.0.
Задание Б
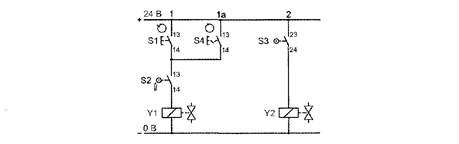
Принцип действия привода. Если шток гидроцилиндра 1.0 полностью втянут, то путевой выключатель S2 активирован и при кратковременном нажатии оператором на пусковую кнопку S1 (см. электрическую схему) напряжение подается на электромагнит Y1. Электромагнит Y1 переключает 4/2 распределитель 1.1 в позицию а (см. гидравлическую схему), шток гидроцилиндра 1.0 выдвигается. При достижении штоком гидроцилиндра электромеханического путевого выключателя S2 управляющий электрический сигнал подается на электромагнит Y2, что приводит к переключению распределителя 1.1 в позицию b и автоматическому втягиванию штока гидроцилиндра 1.0 (даже при нажатой кнопке S1). Задание В
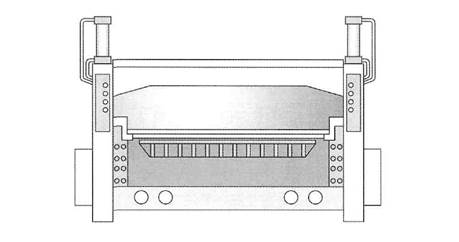
Принцип действия привода. Если шток гидроцилиндра 1.0 полностью втянут, то путевой выключатель S2 активирован. Кантователь будет работать в режиме единичного цикла при кратковременном нажатии на выключатель S1. При нажатии на выключатель S2 (обратить внимание на то, что этот выключатель должен быть с фиксацией органа управления) кантователь работает в режиме непрерывного цикла - после возврата штока гидроцилиндра 1.0 во втянутое положение автоматически подается команда на выдвижение.
Лабораторная работа № 10
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-03-09; просмотров: 921; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.19.211.134 (0.023 с.) |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||