Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Учебно - методическое пособиеСтр 1 из 2Следующая ⇒
Учебно - методическое пособие
ЭЛЕКТРОПРИВОД ГОРНЫХ МАШИН
Учебно - методическое пособие для студентов дневного и заочного отделений специальности 13.02.11 и 21.02.17.
«Горные машины и оборудование»
В учебно-методическом пособии рассматриваются следующие вопросы: понятие электропривода, механика электропривода, особенности эксплуатации электроприводов горных машин (для подземных и открытых разработок); электрооборудование горных машин; конструкции, принцип действия, механические и регулировочные характеристики, тормозные режимы работы электрических двигателей, некоторые вопросы систем управления электроприводами. Рассмотрены конструкции, принцип действия, механические и регулировочные характеристики, тормозные режимы работы асинхронных двигателей, а также приведены примеры асинхронных двигателей, применяемых в электроприводах горных машин. ОГЛАВЛЕНИЕ ВВЕДЕНИЕ..................................................................................... 4 1. ЭЛЕКТРОПРИВОД..................................................................... 5 Составные части электропривода.............................................. 5 Механика ЭП.............................................................................. 8 Основное уравнение движения ЭП............................................ 9 Приведение статических моментов и усилий к валу электродвигателя 14 Расчет момента инерции привода J........................................ 16 2. ОСОБЕННОСТИ РАБОТЫ ЭЛЕКТРОПРИВОДОВ ГОРНЫХ МАШИН....................................................................... 18 3. ЭЛЕКТРООБОРУДОВАНИЕ ГОРНЫХ МАШИН................... 21 Требования к электрооборудованию горных предприятий.... 22 Асинхронные машины.............................................................. 30 Принцип работы и устройство асинхронных машин. 30 Схемы замещения АМ.................................................. 31 Механическая характеристика АМ.............................. 34 3.2.4 Способы регулирования частоты вращения АМ.......... 38 Способы пуска асинхронных двигателей.................... 44 Тормозные режимы АМ............................................... 46 Асинхронные машины, применяемые для электроприводов горных машин.................................... 49 ЛИТЕРАТУРА............................................................................... 65
3 ВВЕДЕНИЕ Современные горные предприятия представляют собой предпри- ятия с высоким уровнем механизации, на которых сосредоточено большое количество машин различного функционального назначе- ния, основные группы которых составляют горные и транспортные машины и комплексы. Способы разработки месторождений полез- ных ископаемых неразрывно связаны с уровнем развития, как тех- нологии добычи, так и используемой техники.
К горным машинам (ГМ) относят машины, производящие раз- рушение полезных ископаемых и пород, их погрузку на транспорт- ные средства, выдачу полезного ископаемого или породы за преде- лы очистного или проходческого забоя, а также машины, осуществ- ляющие крепление в подземных условиях очистных и проходческих выработок. Различают выемочные ГМ (очистные и проходческие), погрузоч- ные машины, крепи (механизированные и индивидуальные), буриль- ные машины. К выемочным относятся очистные и проходческие комбайны, угольные струги, одно- и многоковшовые экскаваторы, земснаряды, драги. На открытых горных работах используются ком- плексы машин непрерывного действия, имеющие в своем составе мощные многоковшовые (роторные) экскаваторы и ленточные маги- стральные конвейеры; конвейерный транспорт: скребковые, ленточ- ные, ленточно-цепные и пластинчатые конвейеры; рельсовый транс- порт: локомотивы, вагоны, большегрузные вагоны, самоходные ва- гонетки. При подземной добыче руд получает массовое использование самоходное горное оборудование (бурильные маши- ны, погрузочно-транспортные машины, самоходные вагонетки). В настоящее время автоматизация работы установок и механиз- мов становится возможной благодаря использованию автоматизи- рованного электропривода (АЭП). Все большее количество совре- менных ГМ имеют электроприводы и повышение производительно- сти, надежности работы горной техники неразрывно связано с ее автоматизацией.
4 ЭЛЕКТРОПРИВОД Составные части электропривода Рациональное проектирование современного автоматизированно- го электропривода (АЭП) требует глубокого знакомства с условиями работы производственного механизма. Оно может вестись лишь на основе тщательно разработанного технического задания, в котором должны быть учтены все особенности производственного процесса и условия работы исполнительного механизма. Электропривод (ЭП) является одним из основных элементов любой электромеханической системы. От его свойств и характеристик в значительной мере зави- сит производительность рабочей машины и качество выпускаемой ею продукции. Поэтому проектирование ЭП должно вестись взаимо- связано с проектированием рабочей машины.
В простейшем случае ЭП представляет собой электродвигатель (ЭД), питаемый от сети и приводящий в движение какой-либо ме- ханизм. При этом система управления может сводиться к обычному пакетному выключателю, включающему ЭД в сеть. Электропривод это электромеханическая система, состоящая их электродвигательного, преобразовательного, передаточного и управляющего устройств, предназначенных для приведения в дви- жение исполнительных органов рабочей машины и управления этим движением. На рис. 1.1 изображена структурная схема автоматизированного электропривода (АЭП), где: П – преобразователь электроэнергии – устройство, преобразую- щее электроэнергию сети (сеть постоянного тока характеризуется величинами напряжения U c и тока I c; электрическая сеть перемен- ного тока характеризуется величиной напряжения U С, частотой f С, количеством фаз m) в электроэнергию с другими параметрами – U П, I П, или U П, f П, m П. П предназначен для питания ЭД и создания управляющего воздействия на него; ЭД – электродвигатель (электромеханический преобразователь – преобразует электрическую энергию в механическую с параметра- ми М (вращающий момент), w (угловая скорость); ПУ – передаточное устройство (кинематическая цепь). ПУ – осуществляет преобразование движения в механической части ЭП. 5 При помощи ПУ можно увеличить или снизить скорость вращения, изменить вид движения (преобразовать вращательное в поступа- тельное). К ПУ относятся редукторы, винтовые, зубчатые, реечные, ременные передачи, кривошипно-шатунные механизмы и т.д. ПУ характеризуется коэффициентом передачи, механической инерционностью и упругостью его элементов. УУ – устройство управления – управляет преобразователем и получает командные сигналы от задающего устройства (ЗУ), а ин- формацию о текущем состоянии ЭП и технологического процесса – от датчиков обратной связи (ОС). УУ сравнивает показания датчи- ков с опорными величинами и, при наличии рассогласования, выра- батывает управляющий сигнал, воздействующий через П на ЭД в направлении устранения возникшего рассогласования с требуемой точностью и быстродействием. РО – рабочий орган исполнительного механизма, при враща- тельном движении характеризуется моментом инерции J ро, угловой скоростью w ро и моментом М ро; при поступательном движении – массой m ро, линейной скоростью v ро и силой F ро.
Рис. 1.1. Структурная схема автоматизированного электропривода
Жирными линиями обозначен силовой поток мощности, тонки- ми – слаботочные линии или провода управления.
6 Верхний ряд прямоугольников (рис. 1.1) отражает структуру так называемой разомкнутой системы АЭП, которая характеризуется тем, что выходные параметры системы M ро, w ро, (F ро, v ро) не связа- ны электрически с входом этой системы (система не имеет обрат- ных связей).
ОС – обратная связь – канал воздействия выходных или проме- жуточных параметров системы на ее управляющий вход. Для орга- низации ОС необходимы датчики (ДОСЭ – датчики обратной связи электрические, ДОСМ – датчики обратной связи механические). С помощью этих датчиков ток, напряжение,скорость, момент или усилие, положение (перемещение) исполнительного органа рабочей машины, преобразуются в пропорциональные этим параметрам электрические сигналы. В структурной схеме АЭП можно выделить три части: 1) электрический двигатель; 2) механическая часть – для передачи механической энергии от ЭД к исполнительному органу и для изменения вида, скорости дви- жения; 3) система управления (СУ). Электроприводы различают: – по виду движения: вращательного и поступательного, однона- правленного и реверсивного, возвратно-поступательного; эти дви- жения могут иметь как непрерывный, так и дискретный характер; – по принципам регулирования скорости и положения: нерегу- лируемый; регулируемый; следящий (с помощью ЭП воспроизво- дится перемещение РО); программно-управляемый (ЭП обеспечи- вает перемещение РО в соответствии с заданной программой); адаптивный (ЭП автоматически обеспечивает наиболее выгодный режим движения РО); позиционный (ЭП обеспечивает регулирова- ние положения РО); – по способу передачи механической энергии: индивидуаль- ный – когда каждый РО рабочей машины приводится в движение своим отдельным ЭД (является основным ЭП, так как при этом упрощается кинематическая передача от ЭД к РО, упрощается ав- томатизация технологического процесса, улучшаются условия об- служивания рабочей машины); взаимосвязанный ЭП – содержит два или несколько электрически или механически связанных между собой ЭП, например, многодвигательный ЭП, при котором не- 7 сколько ЭД работают на общий вал, приводя в движение один РО, или РО одной машины приводится в движение несколькими ЭД, т.е. по разным координатам движение обеспечивается одиночными ЭД; групповой ЭП – от одного ЭД приводится в движение несколько РО одной или нескольких рабочих машин, имеет разветвленную кинематическую цепь (трансмиссию).
Механика ЭП Механическая часть ЭП может представлять собой сложную ки- нематическую цепь с большим числом движущихся элементов. Она передает механическую энергию с помощью ПУ от вала ЭД к рабо- чему органу производственной машины, где эта энергия реализует- ся в полезную работу. Конструктивное выполнение механической части может быть различным, но имеет определенные звенья:
– ЭД как звено механической части – источник или потребитель механической энергии. В механическую часть привода входит лишь вращающаяся часть ЭД – его ротор, который обладает определен- ным моментом инерции и может вращаться с некоторой угловой скоростью ω и развивать движущий или тормозящий момент М; – элементы ПУ вращаются или движутся поступательно с разной скоростью, имеют определенный момент инерции (массу), соедине- ния между ними в общем случае содержат зазоры. Наличие этих свойств элементов ПУ вносит определенные искажения в процесс передачи движения и требует соответствующего учета. Анализ меха- нического движения осуществляется с помощью расчетных схем ЭП. Для облегчения расчетов переходят к расчетной схеме, т.е. обычно приводят все инерционные массы механических звеньев, все внешние моменты и силы к валу ЭД. Движущие моменты, инерционные массы, моменты сопротивления должны быть пере- считаны так, чтобы сохранились кинематические и динамические свойства исходной системы. Расчетную схему можно свести к од- ному обобщенному жесткому звену, имеющему эквивалентную массу с моментом инерции J S, на которую воздействует электро- магнитный момент двигателя М и суммарный, приведенный к валу двигателя, момент сопротивления (статический момент М с), вклю- чающий все механические потери в системе, в том числе механиче-
8 ские потери в двигателе. Считаем, что система абсолютно жесткая (рис. 1.2).
М с
Рис. 1.2. Расчетная схема ЭП
В соответствие с основным законом динамики для вращающего- ся тела векторная сумма моментов, действующих относительно оси вращения, равна производной момента количества движения. Дви- жение материального тела определяется вторым законом Ньютона: d v n d w
dt å M i = J
– для поступательного и вращательного движения соответственно, где S M, S F – векторные суммы момен-
тов и сил, действующих на тело, d w = e,
dv = a
– угловое ускоре- ние и ускорение поступательно движущегося тела соответственно, w, v – угловая и линейная скорости тел, движущихся вращательно и поступательно. Момент сопротивления М с, возникающий на валу рабочей ма- шины, состоит из двух слагаемых: полезной работы РО (связана с выполнением соответствующей технологической операции) и рабо- ты сил трения.
Основное уравнение движения ЭП Для приведения к валу ЭД момента или усилия нагрузки РО производственной машины используют баланс мощностей в меха- нической части ЭП. Баланс мощностей для ЭП можно записать в виде формулы 1.1.
9 Р = Р С + Р Д , (1.1)
где Р – мощность, развиваемая ЭД (Вт); Р С – мощность статической нагрузки, в т.ч. и мощность, затра- чиваемая на преодоление сил трения;
Р Д – мощность, обусловленная изменением кинетической энер- гии системы. Выражения определения мощностей для вращательного движе- ния имеют вид:
Р = М w;
Р С = М Сw;
Д dt = M Дw,
где М – вращающий момент ЭД; w – угловая скорость вала ЭД, рад/с; М С – момент статической нагрузки, приведенный к валу ЭД; Р Д, М Д –динамическая мощность и динамический момент, учи- J Sw2
тывающие изменение кинетической энергии A k = 2;
dt Исходя из вышеизложенного, можно записать следующее урав- нение для определения динамической мощности:
dA k d w w2 æ dJ S ö
Р Д = dt = J Sw dt + 2 ç dt ÷ ;
d w w2 dJ S d a
Р Д = J Sw dt + 2 ·, d a dt 10 где d a J S – угол поворота вала ЭД за время dt, w = d a ;
– суммарный момент инерции системы, приведенный к валу ЭД. Динамический момент можно выразить следующим образом:
2 M = P Д = d w + w dJ S . (1.3)
Д w J S dt 2 d a Тогда в соответствии с (1.1) можно записать:
М = М С + М Д.
Уравнение движения ЭП, в общем виде, имеет вид:
2
M = + d w + w dJ S , (1.4) М С J S dt 2 d a
где М и w – текущие значения момента и угловой скорости ЭД. За- висимость момента М от угловой скорости w называется механиче- ской характеристикой. Вместо момента инерции часто вводится понятие махового мо- мента (GD 2):
GD 2
= 4 gJ, GD 2
4 g где G – вес системы (сила тяжести), Н; D – диаметр инерции, м; g – ускорение свободного падения, g = 9,81 м/с2. В этом случае уравнение движения ЭП принимает следующий вид:
M = М С + GD 2 dn
375 dt + n 2
dGD 2 d a
, (1.5)
11 где n – частота вращения вала ЭД (об./мин). Следует отметить, что
60 В ряде случаев М С определяется угловой скоростью производ- ственного механизма (вентилятора, насоса, компрессора). Момент инерции привода J S для большинства машин (кривошипных) явля- ется периодической функцией, явно зависящей от угла a или вре- мени t. Если момент инерции движения приобретает вид: J S не зависит от угла a, уравнение
М - М С = J S d w . (1.6)
Для поступательного движения выражения определения мощно- стей имеют вид:
Р = Fv;
P C = F C v;
Д dt где F – движущая сила, Н; v – линейная скорость перемещения точки приложения этой си- лы, м/с; F C – сила сопротивления; m S v 2
А k = 2 – кинетическая энергия; m S – масса системы, приведенная к скорости точки приложения силы. Тогда уравнение движения ЭП будет иметь вид:
dv v 2 dm S
F = F C + m S dt + 2 , (1.7) dL 12 где L – путь, пройденный точкой приложения силы. Если масса системы остается неизменной m S = const, то уравне- ние движения ЭП для поступательного движения запишется в виде:
F = F + m dv . (1.8) C S dt Статические моменты (моменты сопротивления) делятся: – на активные – обусловленные потенциальными силами и не меняющие своего направления при изменении направления движе- ния (при подъеме и опускании груза), они могут быть движущими, и могут препятствовать движению; – реактивные – всегда направленные против движения (момен- ты, обусловленные силами трения). При установившемся режиме работы скорость привода постоян- на (М = М С). Переходный режим работа ЭП – это режим работы при переходе от одного установившегося состояния к другому. Причи- нами возникновения переходных режимов в ЭП являются измене- ние нагрузки, связанное с производственным процессом, либо воз- действие на ЭП при управлении им, т.е. пуск, торможение, измене- ние направления движения, а также нарушения нормальных условий электроснабжения (изменение напряжения, частоты сети). Уравнение движения ЭП должно учитывать все силы и моменты, действующие в переходных режимах. С учетом вышесказанного, уравнение движения электропривода представим в виде:
± M M C = J S d w. dt
(1.9)
Уравнение движения ЭП (1.9) показывает, что развиваемый дви- гателем вращающий момент М уравновешивается моментом сопро- тивления М С на его валу и динамическим (инерционным) моментом М Д = J S d w . Знаки «+» и «–» говорят о двигательном и тормозном
режимах работы.
13 Приведение статических моментов и усилий к валу электродвигателя Обычно ЭД приводит в действие производственный механизм через систему передач. При расчетах все моменты и усилия необхо- димо привести к одному валу (чаще к валу ЭД), учитывая при этом потери на трение и КПД (h) передач. В качестве примера рассмот- рим кинематическую схему (рис. 1.3).
 М С М С
М РО, wРО
(F РО, v РО)
Рис. 1.3. Кинематическая схема механизма
Мощность РО исполнительного механизма Р РО, в соответствии с вышеизложенным, определяется по формулам: Р РО = М РО ×wРО (М РО – вращающий момент на РО) или P PO = F PO v PO (F PO – сила,
i = w = i i
– передаточное отношение (i = w , i
= w1 – пе- PО wPO 1 2 1 w1 2 w РО редаточные отношения редукторов). Выражения приведения статических моментов и усилий к валу ЭД в зависимости от режима работы ЭП, с учетом КПД, сведены в табл. 1.1.
14
D Р – мощность потерь в механических звеньях;
30 h – КПД механической части ЭП, h = h1h2;
w Необходимо отметить, что тивным параметром ПУ. i PО и r определяются по конструк-
15 Общее выражение для приведения статических моментов к валу ЭД имеет вид:
М = М + n М i + l
F k v k
, (1.9)
å h w i =1 i i k =1 k где М Р – статический момент сопротивления на роторе ЭД. Второе и третье слагаемые учитывают моменты всех частей движущихся вращательно и поступательно соответственно.
Расчет момента инерции привода J Инерционное действие вращающихся частей механизма, нахо- дящихся на промежуточных валах, можно заменить действием во- ображаемого маховика, расположенного на валу ЭД и обладающего запасом кинетической энергии, равным запасу кинетической энер- гии действующих частей. Приведение инерционных масс и моментов инерции механиче- ских звеньев к валу ЭД заключается в том, что эти массы и момен- ты инерции заменяются одним эквивалентным моментом инерции J S на валу ЭД (т.е. расчет J S производится исходя из условия ра- венства кинетических энергий, запасенных во всех движущихся элементах ЭП и кинетической энергии, которая должна быть запа- сена в эквивалентном маховике). Рассчитаем суммарный момент инерции ЭП для примера на ри- сунке 1.3. Кинетическая энергия, запасенная искомым моментом w2 инерции J S определяется по формуле J S ; кинетические энер-
гии, записанные в движущихся элементах ЭП:
w2 w2
2 2 w2 w2
2 2
где J 1¢ , J 2¢ – моменты инерции, приведенные к валу ЭД. Тогда
16 J 1¢ w2 1
1 J 2¢ w2 1
2
При наличии поступательного движения элементов, деталь ме- ханизма с массой m, движущуюся поступательно со скоростью v, заменяем воображаемой деталью с моментом инерции ложенной валу ЭД: J П¢ , распо-
J m
Þ J ¢ = v 2.
П m w2 Запас кинетической энергии ЭП остается неизменным, на осно- вании чего можно записать: w2 w2
n + å J i i =1 w i 2
l + å m k k =1 v k 2
, (1.10)
где J Д – момент инерции двигателя, определяемый из каталога. Уравнение для расчета суммарного момента инерции ЭП полу- чим, разделив выражение (1.10) на w2 / 2:
J S = J Д n +
l å m k (v k
)2, (1.11) i =1 i k =1
где второе и третье слагаемые уравнения являются суммарными моментами инерции всех вращательно и поступательно движущих- ся элементов ЭП соответственно.
17 ВЗРЫВООПАСНЫЕ СМЕСИ |
КЛАССИФИКАЦИЯ АППАРАТУРЫ | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| ATEX, ГОСТ | NEC, CEC | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Метан | Группа I (шахты) | Class I Group D | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Ацетилен | Группа IIC | Class I Group A | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Водород | Группа IIC | Class I Group B | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Этилен | Группа IIB | Class I Group C | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Пропан | Группа IIA | Class I Group D | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Металлическая пыль | Группа II | Class I, Group E | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Угольная пыль | – | Class II Group F | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

 S F = m;
S F = m; i =1 dt
i =1 dt dt
dt dt
dt Р = dA k
Р = dA k
 dA k – скорость нарастания кинетической энергии системы.
dA k – скорость нарастания кинетической энергии системы.




 dt
dt

 J = ,
J = ,
 7200
7200 n связана с угловой скоростью ω (рад/с) соотношением w = 2p n.
n связана с угловой скоростью ω (рад/с) соотношением w = 2p n. dt
dt P = dA k ,
P = dA k ,



 dt
dt
 действующая на РО при поступательном движении),
действующая на РО при поступательном движении),

 Таблица 1.1
Таблица 1.1 D Р
Р С = Р РО+ D Р; Р = Р РО
С h
для вращательного движения:
М w = М РОωРО,
С h
тогда М = М РО wРО = М РО 1;
С h w h i P
для поступательного движения:
М w = F PO v PO,
С h
тогда M = F POr
C h
D Р
Р С = Р РО+ D Р; Р = Р РО
С h
для вращательного движения:
М w = М РОωРО,
С h
тогда М = М РО wРО = М РО 1;
С h w h i P
для поступательного движения:
М w = F PO v PO,
С h
тогда M = F POr
C h
 D Р
Р С = Р РО - D Р, Р С = Р РОh
для вращательного движения:
М Сw = М РОwРОh,
тогда М = М РО h ;
С i P
для поступательного движения:
М Сw = F PO v POh,
тогда M = F PO v POh ;
C w
M C = F POrh
D Р
Р С = Р РО - D Р, Р С = Р РОh
для вращательного движения:
М Сw = М РОwРОh,
тогда М = М РО h ;
С i P
для поступательного движения:
М Сw = F PO v POh,
тогда M = F PO v POh ;
C w
M C = F POrh


 В табл. 1.1 приняты следующие обозначения:
В табл. 1.1 приняты следующие обозначения: r = v – радиус приведения усилия нагрузки к валу ЭД.
r = v – радиус приведения усилия нагрузки к валу ЭД.




 С Р å i h
С Р å i h
 П 2 2
П 2 2
 J S 2 = J Д 2
J S 2 = J Д 2 2
2 2
2
 w
w
В соответствии с директивой Евросоюза 94/9/EC с 1 июля 2003 года введен новый стандарт взрывозащищенного оборудо- вания АТЕХ (ATmospheres Explosibles – взрывоопасные смеси га- зов), вместо CENELEC. Требования АТЕХ распространяются на механическое, электрическое оборудование и защитные средства, которые предполагается использовать в потенциально взрывоопас- ной атмосфере, как под землей, так и на поверхности земли. В стан-
25
дарте АТЕХ ужесточены требования стандартов EN50020/EN50014 в части IS (Intrinsically Safe) оборудования.
Классификационную маркировку взрывозащищенного оборудо- вания по АТЕХ рассмотрим на примере, приведенном в табл. 3.2.
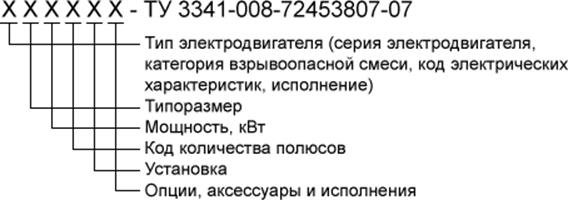
Таблица 3.2 Маркировка взрывозащищенного оборудования
|
ФОРМИРОВАНИЕ МАРКИРОВКИ
Пример: HB50 CG 100LB 1,5 6 B3 /энкодер /датчики подшипника – ТУ 3341 -008-72453807– 07. Тип электродвигателя: HB50CG. Тип базы: 100LB. Мощность, кВт: 1,5. Код количества полюсов: 6 (6 полюсов). Установка: B3. Опции, аксессуары и исполнения: энкодер, датчики подшипника. ЛИТЕРАТУРА 1. Светличный, П. Л. Электропривод и электроснабжение горных машин / П. Л. Светличный. – М.: Недра, 1968. – 312 с. 2. Солод, В. И. Горные машины и автоматизированные комплек- сы / В. И. Солод, В. И. Зайков, К. М. Первов. – М.: Недра, 1981. – 502 с. 3. Москаленко, В. В. Автоматизированный электропривод / В. В. Москаленко. – М.: Высшая школа, 1986. – 460 с. 4. Чиликин, М. П. Основы автоматизированного электропри- вода / М. П. Чиликин [и др.]. – М.: Энергия, 1974. – 568 с. 5. Костенко, М. П. Электрические машины / М. П. Костенко, Л. П. Пиотровский; под ред. И. П. Копылова, Б. К. Клокова. – Л.: Энергия, 1973. – 500 с. 6. Справочник по электрическим машинам / под ред. И. П. Ко- пылова, Б. К. Клокова. – М.: Энергоатомиздат, 1988. – 605 с. 7. Режим доступа: http://model.exponenta.ru/electro/IMG1/li_08006.jpg. 8. Режим доступа: http://electricalschool.info/uploads/posts/2009- 03/1238260645_fazny1.jpg. 9. Режим доступа: http://electricalschool.info/uploads/posts/2009- 03/1238261075_fazny2.jpg. 10. Режим доступа: http://electricalschool.info/maschiny/259- asinkhronnye-jelektrodvigateli-s-faznym.html. 11. Режим доступа: http://el-mashin.narod.ru/pic/010.jpg. Учебно - методическое пособие
ЭЛЕКТРОПРИВОД ГОРНЫХ МАШИН
Учебно - методическое пособие для студентов дневного и заочного отделений специальности 13.02.11 и 21.02.17.
«Горные машины и оборудование»
В учебно-методическом пособии рассматриваются следующие вопросы: понятие электропривода, механика электропривода, особенности эксплуатации электроприводов горных машин (для подземных и открытых разработок); электрооборудование горных машин; конструкции, принцип действия, механические и регулировочные характеристики, тормозные режимы работы электрических двигателей, некоторые вопросы систем управления электроприводами. Рассмотрены конструкции, принцип действия, механические и регулировочные характеристики, тормозные режимы работы асинхронных двигателей, а также приведены примеры асинхронных двигателей, применяемых в электроприводах горных машин. ОГЛАВЛЕНИЕ ВВЕДЕНИЕ..................................................................................... 4 1. ЭЛЕКТРОПРИВОД..................................................................... 5 Составные части электропривода.............................................. 5 Механика ЭП.............................................................................. 8 Основное уравнение движения ЭП............................................ 9 Приведение статических моментов и усилий к валу электродвигателя 14 Расчет момента инерции привода J........................................ 16 2. ОСОБЕННОСТИ РАБОТЫ ЭЛЕКТРОПРИВОДОВ ГОРНЫХ МАШИН....................................................................... 18 3. ЭЛЕКТРООБОРУДОВАНИЕ ГОРНЫХ МАШИН................... 21 Требования к электрооборудованию горных предприятий.... 22 Асинхронные машины.............................................................. 30 Принцип работы и устройство асинхронных машин. 30 Схемы замещения АМ.................................................. 31 Механическая характеристика АМ.............................. 34 3.2.4 Способы регулирования частоты вращения АМ.......... 38 Способы пуска асинхронных двигателей.................... 44 Тормозные режимы АМ............................................... 46 Асинхронные машины, применяемые для электроприводов горных машин.................................... 49 ЛИТЕРАТУРА............................................................................... 65
3 ВВЕДЕНИЕ Современные горные предприятия представляют собой предпри- ятия с высоким уровнем механизации, на которых сосредоточено большое количество машин различного функционального назначе- ния, основные группы которых составляют горные и транспортные машины и комплексы. Способы разработки месторождений полез- ных ископаемых неразрывно связаны с уровнем развития, как тех- нологии добычи, так и используемой техники. К горным машинам (ГМ) относят машины, производящие раз- рушение полезных ископаемых и пород, их погрузку на транспорт- ные средства, выдачу полезного ископаемого или породы за преде- лы очистного или проходческого забоя, а также машины, осуществ- ляющие крепление в подземных условиях очистных и проходческих выработок. Различают выемочные ГМ (очистные и проходческие), погрузоч- ные машины, крепи (механизированные и индивидуальные), буриль- ные машины. К выемочным относятся очистные и проходческие комбайны, угольные струги, одно- и многоковшовые экскаваторы, земснаряды, драги. На открытых горных работах используются ком- плексы машин непрерывного действия, имеющие в своем составе мощные многоковшовые (роторные) экска
|
||||||||
|
|
Последнее изменение этой страницы: 2021-02-07; просмотров: 106; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.138.123.238 (0.411 с.) |
|||||||