Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Определение параметров сигнала
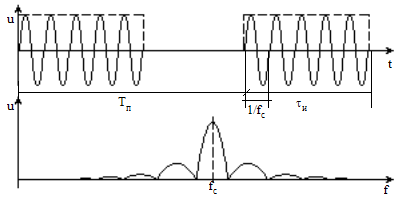
Выберем в качестве зондирующего сигнала простой сигнал с базой равной 1 (радиоимпульсы с прямоугольной огибающей, рис.2.2.1). Выбор является предварительным. После расчета импульсной мощности передатчика Pи, если она превысит допустимое для наземных РЛС значение 1 МВт/имп, зададимся приемлемой импульсной мощностью и возьмем в качестве зондирующего сигнала сложный сигнал.
Рис. 2.2.1 Временная и спектральная диаграммы радиоимпульсов, отраженных от цели и поступающих на вход РПрУ
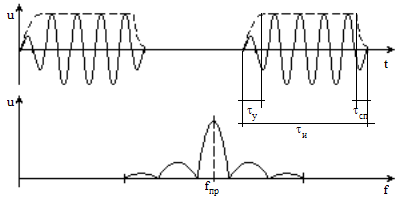
Рис. 2.2.2 Временная и спектральная диаграммы сигнала на выходе линейной части РПрУ
Рис. 2.2.3 Временная и спектральная диаграммы видеоимпульсов на выходе детектора РПрУ Данные к расчёту: Дальность: R=150 км; Разрешение по дальности: DR=150 м; Суммарная ошибка: sS=10 м; ЭПР цели: sц=2 м2; Скорость цели: Vц=400 м/с; Длина волны: l=0,23 м. Расчёт параметров сигнала: Выбор частоты следования и длительности импульсов производится из условия однозначного измерения параметров целей на максимальной дальности: Период повторения импульса: Частота следования импульсов: В схеме сопровождения по дальности рассматриваемой РЛС определяется временной сдвиг очередного эхо-сигнала сопровождаемой цели по отношению к следящим импульсам, временное положение которых соответствует оценке задержки сигнала цели. Поэтому время установления переднего фронта видеоимпульса (рис.2.2.3) должно лежать в пределах: В РЛС сопровождения, измеряющих дальность и два угла, используют игольчатый луч. Ширина луча антенны одинакова во всех плоскостях и определяется разрешением по углу: q0,5=Da=Db. Т.к. измеритель угловых координат выходит за рамки данного проекта, и в техническом задании отсутствуют значения Da и Db, то q0,5 принимаем равным 1,5о. Основной характеристикой качества работы радиолокационной станции, исходя из её целевого назначения, является точность слежения. Показателями точности являются ошибки работы системы. Различают динамическую и флюктуационную ошибку. Динамической ошибкой sд является ошибка по задающему воздействию, а флюктуационная sф в данном случае связана с собственным шумом приемника.
Оптимизация системы по точности заключается в выборе оптимального коэффициента усиления разомкнутой системы КУопт, при котором имеем минимум среднеквадратической ошибки
Отношение сигнал/шум связано с флюктуационной ошибкой соотношением:
Необходимо учитывать потери в отношении сигнал/шум, возникающие из-за следующих причин: · потери при распространении радиоволн r1 = 1...3 дБ · потери в антенно-фидерном тракте r 2 = 1 дБ · потери при амплитудном детектировании r 3 = 1...5 дБ · потери на квантование r 4 = 2 дБ (при двухуровневом квантовании) Суммарный коэффициент потерь: r = Sri = 5...10 дБ. Примем r = 10 [дБ] = 3,16 [раз] Отношение сигнал/шум с учетом потерь: (Рс/Рш)`= (Рс/Рш)×r = 0,45×3,16» 1,42 Определение параметров антенны: Коэффициент направленного действия (КНД):
Примем коэффициент полезного действия (КПД) антенны равным: h=0,95. Коэффициент усиления:
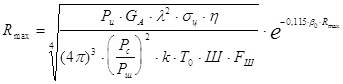
Расчет требуемой мощности передатчика РЛС производим на основе уравнения дальности радиолокации, без учета влияния Земли (высота объектов достаточна):
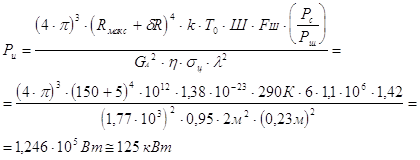
где sц - эффективная площадь рассеяния цели h - КПД антенны (h» 0,95) k = 1,38x10-23 Дж/К - постоянная Больцмана Т0 = 290 К - температура воздуха по Кельвину Ш = 3,5 - коэффициент шума приемника b0 = 0,002...0,004 дБ/км - величина затухания волн в атмосфере. Примем b0 = 0,002 дБ/км. R = Rmax × e-0,115b0Rmax = 150 × e-0,115x0,002x150»145 км dR = Rmax -R = 150-145 =5 км Полоса приемника: Fпр = 1/tи = 1 / 1×10-6 = 1 МГц Полоса шума приемника: Fш= 1,1Fп =1,1×106= 1,1 Мгц Импульсная мощность передатчика:
Ри <1 МВт, следовательно можно использовать простой сигнал. 3.Выбор и обоснование структурной схемы приёмника Структурные схемы РПрУ различаются прежде всего ТВЧ (тракт высокой частоты). Существует несколько различных типов схем. 1.) Детекторный тип 2.) Прямого усиления 3.) Супергетеродинного типа Приёмник прямого детектирования характерен отсутствием усиления колебаний радиочастоты до детектора. Его отличает низкая чувствительность и избирательность.
Приёмник прямого усиления содержит УРЧ. ВЦ и УРЧ настроены на частоту принимаемого сигнала, на которой и осуществляется усиление. Т.к. используется многокаскадный УРЧ, то это обуславливает снижение его устойчивости и общей избирательности приёмника, затрудняет техническую реализацию перестройки по частоте. Трудности. связанные с многокаскадностью УРЧ, позволяет устранить, в принципе, использование регенеративных и сверхрегенеративных усилителей, обеспечивающих большее усиление на каскад. Однако такие усилители обладают повышенными искажениями, относительно низкой устойчивостью по отношению к дестабилизирующим факторам, повышенной вероятностью паразитного излучения. По этой причине они применяются редко, и находят применение, в частности, в портативных приёмниках СВЧ. При любых типах используемых УРЧ полностью преодолеть присущие схеме прямого усиления недостатки не удаётся, поэтому в настоящее время такие РПрУ с фиксированной настройкой применяются практически лишь в микроволновом и оптическом диапазонах, что не соответствует характеристикам проектируемого РПрУ, т.к. он рассчитан на работу в сантиметровом диапазоне. Существенное улучшение всех показателей РПрУ достигается на основе принципа преобразования частоты принимаемого сигнала - переноса его в частотную область, где он может быть обработан с наибольшей эффективностью. Самое широкое распространение во всех радиодиапазонах получила построенная на этом принципе схема супергетеродинного приемника. Эта схема в настоящее время наиболее совершенна. Приемники супергетеродинного типа позволяют успешно решать задачи получения требуемой фильтрации принимаемого сигнала, обеспечение заданного усиления, решение проблемы селективности, простоты перестройки, которая обеспечивается с помощью простых колебательных систем преселектора. Относительная широкополосность приемников импульсных сигналов позволяет, как правило, строить такие приемники с однократным преобразованием частоты. Из выше сказанного можно сделать вывод, что построение проектируемого РПрУ целесообразно выполнять по супергетеродинной схеме, наилучшим образом удовлетворяющей заданным техническим требованиям. Амплитуда сигналов, поступающих на вход радиолокационного РПрУ, изменяется в широких пределах, т.к. мощность отраженных от цели сигналов обратно пропорциональна четвертой степени расстояния до цели (которое может меняться) и, кроме того, зависит от типа цели и её эффективной поверхности рассеивания. Работа РЛС в реальных условиях сопровождается действием разного рода активных и пассивных нестационарных помех естественного и искусственного происхождения, уровень мощности которых зачастую значительно (на 20..60 дБ) превышает уровень полезного сигнала, а параметры априорно неизвестны. Воздействие помех еще больше расширяет диапазон изменения сигналов, поступающих в антенну РЛС. Пределы изменения амплитуд напряжения сигнала от UСмин до UСмакс характеризуются динамическим диапазоном сигналов DС = UСмин/UСмакс, который может быть выражен в децибеллах: DС [дБ] = 20lg(UСмин/UСмакс). Для радиолокационных сигналов DС @ (50...120) дБ [9], однако для РЛС конкретного назначения обычно принимают DС @ (50..90) дБ, т.к. известны типы целей и пределы изменения дальности.
|
||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-02-07; просмотров: 160; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.222.67.251 (0.017 с.) |
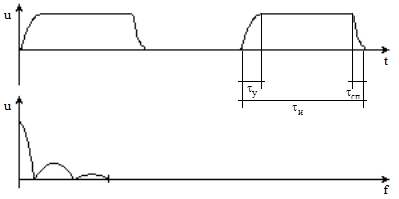
 Длительность импульса:
Длительность импульса: 
 . По этому параметру определяется полоса пропускания линейной части РПрУ, что будет сделано в дальнейшем. Примем tу=0,2 мкс.
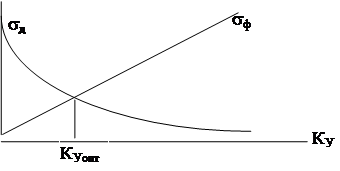
. По этому параметру определяется полоса пропускания линейной части РПрУ, что будет сделано в дальнейшем. Примем tу=0,2 мкс. . Как видно из графика (рис.2) зависимости sд и sф от КУ, в оптимальном режиме sф=sд, откуда
. Как видно из графика (рис.2) зависимости sд и sф от КУ, в оптимальном режиме sф=sд, откуда 
 , где полоса DFэ =(5..10)/2p»2
, где полоса DFэ =(5..10)/2p»2